JBPM在无人机遥感网应急调度管理的应用
2016-02-23 03:42田汶鑫汪超亮窦帅李子扬
航天返回与遥感 2016年5期
田汶鑫 汪超亮 窦帅 李子扬
(1 中国科学院光电研究院 中国科学院定量遥感信息技术重点实验室,北京 100094)
(2 中国科学院大学,北京 100049)
JBPM在无人机遥感网应急调度管理的应用
田汶鑫1,2汪超亮1窦帅1李子扬1
(1 中国科学院光电研究院 中国科学院定量遥感信息技术重点实验室,北京 100094)
(2 中国科学院大学,北京 100049)
为了保障无人机遥感业务运行网络的规范化、高效运行,文章建立了一套无人机遥感网应急调度管理系统,实现了应急条件下无人机遥感资源网统一的配置、调度与运行管理。以业务流程管理(Java Business Process Management,JBPM)工作流引擎为基础,首先介绍了JBMP的基本概念和框架,论述了无人机遥感网应急任务调度管理的典型工作流程;然后结合Petri网理论,以Petri网为工具建立了无人机遥感网应急任务调度管理的层次化模型,并对模型进行了正确性验证;最后设计开发了基于JBPM 的无人机遥感网应急调度管理系统,实现了无人机遥感网应急任务调度的全生命周期管理。该系统成功部署并应用于无人机遥感网试验验证任务,满足遥感网任务调度需求的同时,能够长时间稳定无故障运行,实现了无人机遥感网络资源的统一调度管理与有效监视,为无人机遥感网业务运行提供了一种网络化的反馈式互动在线调度管理平台。
工作流引擎 Petri网 任务调度管理 无人机 遥感网
0 引言
无人机以其机动灵活以及飞行保障要求低等特点,近年来在应急响应空间数据获取方面起到了不可替代的作用,逐渐成为应急救灾不可或缺的一类高科技手段。我国幅员辽阔,灾害多发且时空分布随机性很强,目前相对有限的无人机遥感资源使得应用无人机遥感技术支援国家应急响应往往会出现“疲于奔命”的现象[1-4]。因此依托“国家空间数据获取与应用应急协同体系和数据共享服务平台”,统筹考虑全国可用于应急救灾的无人机遥感资源,构建分布式的无人机遥感业务运行网络(简称无人机遥感网),统筹调配无人机遥感资源开展应急救灾工作,是解决上述问题的优选方案。
为了保障无人机遥感网规范化、高效运行,亟待建立一套无人机遥感网应急调度管理系统,实现应急条件下无人机遥感资源的统一配置、调度与运行管理。本文以JBPM(业务流程管理——Java Business Process Management)工作流引擎为基础,结合Petri网理论,提出了针对无人机遥感网应急调度管理的Petri网层次化模型,然后设计开发了基于JBPM的无人机遥感网应急调度管理系统。该系统可将地理位置上分散的、致力于国家应急救灾的无人机遥感资源统一注册,按照无人机遥感网应急调度管理规程实施全过程的、规范化的调度管理,降低人工调度管理的工作量和主观性,为应急情况下无人机遥感资源的高效、有序调度管理提供支持。另外,本系统还可提供流程定制服务,在无需修改软件代码的情况下,实现无人机遥感网应急调度管理流程的更新与发展。
1 工作流及JBPM技术简介
工作流是一种反映业务流程的计算机化的模型,它是为了在计算机环境支持下实现经营过程集成与自动化而建立的可由工作流管理系统执行的业务模型[5]。JBPM是目前比较流行的一种开源工作流引擎,它是一种基于J2EE(Java 2 Platform,Enterprise Edition)的轻量级工作流管理系统,实现业务过程的部分或整体在计算机应用环境下的自动化[6-7]。JBPM的优势主要有如下三点:
1)JBPM 的业务逻辑定义摒弃目前的一些规范,采用了自己定义的流程描述语言——jPDL。jPDL将一个业务流程看作是一个改良的统一的建模语言(UML)状态图,使用直观的流程语言以图形化的方式来表示业务流程,详细定义了这个状态图的每个部分,更贴近用户的理解和体验;
2)JBPM采用Java语言实现,其核心功能都被封装作为一个简单的Java库,提供了功能丰富、对外交互的应用程序编程接口(API)集合,可以在其之上进行功能扩展;
3)使用对象关系映射框架(Hibernate)来管理数据库。Hibernate是目前Java领域中性能非常好的数据存储层解决方案,可以很好的支持主流数据库。通过Hibernate,JBPM将数据的管理职能分离出去,专注于业务逻辑的处理[8]。
选择JBPM工作流引擎建立无人机遥感网应急调度管理系统,不仅可以将复杂的业务流程和系统结构清晰化,对流程数据持久化,而且可以提高系统运行时的灵活性和可扩展性。JBPM 的框架和执行过程如图1所示。JBPM的基本工作步骤为:1)通过jPDL图形化流程编辑器进行流程定义,并加载到应用中;2)启动流程,即创建流程实例的过程;3)执行接口使用户和系统可以操作流程实例,推动流程的流转;4)流程监控,获得当前的待办任务和流程运行的确切状态。JBPM执行接口保证用户和系统可以操作流程实例,推动流程的流转,用户可以通过JBPM的任务接口,获得当前的待办任务。在JBPM框架中,工作流引擎是核心模块,主要功能是解释 jPDL定义的流程过程文件,为流程实例提供运行时环境,调度过程实例的运行,并提供流程监控的接口,这些接口是通过API来提供的[9-10]。
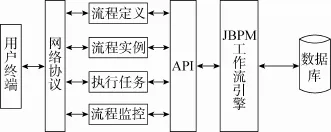
图1 JBPM的框架和执行过程Fig.1 Framework and executing process of JBPM
2 基于Petri网的系统建模与验证
2.1系统建模
本文采用工作流技术,实现对无人机遥感网任务调度管理中任务的申请、审核、执行、总结为主线的生命周期管理。工作流模型是业务过程计算机化的形式表示,当前工作流建模方法多种多样,有基于活动网络的建模方法、基于UML活动图的建模方法、基于Petri网的建模方法等。因Petri网不仅具有易于理解的图形特征,而且具有严密的数学基础,是一个过程建模与分析的强大工具,还可以通过它的结构检验模型的正确性[11],所以本文采用Petri网作为系统的建模工具。在建模过程中,主要采用“自顶向下”层次化的建模方法[12]。
无人机遥感网任务调度管理业务的运行方式按照应用场景,可分为常规任务管理和应急任务管理两种,这两种任务的管理与调度方式都是纵向管理的过程,但需采用不同的模型实现任务调度。
在常规任务调度管理方式中,任务的时间要求并不紧急,管理模型的业务流程在满足任务周期的情况下,针对不同的无人机遥感网任务调度需求,制定不同的任务流程计划,实现系统资源的调度和任务的分发。例如图2所示的无人机遥感网常规任务调度流程,工作流的开始条件为任务申请者需要进行任务申请,经过任务分析、任务审核、任务申请的信息预发布和反馈后、填写任务大纲、填写任务书、通知各个相关部门任务会签、制订任务实施方案、任务执行、任务数据分析等流程,最后总结报告并归档,流程结束。
相对于常规的任务管理流程,无人机遥感网应急任务调度管理流程产生于突发或紧急的情况,需尽最大可能满足应急的快速响应,取消任务的审核、预发布、反馈等步骤,简化流程,加快应急响应速度;并根据实际任务需求,增加态势评估、应急信息上报等步骤,提高处理紧急情况的适用性,实现应急响应情况下资源的合理调度和任务的及时响应。
本文设计如图3所示的应急任务调度管理流程,该工作流的开始条件为任务申请者发起应急任务申请,然后应急指挥调度中心的系统工作人员对任务区所需的遥感载荷、无人机资源、飞行航线和支撑条件等进行分析,并根据结果进行任务规划、组建应急响应试验队,同时各相关任务执行参与者上报系统技术状态。系统工作人员编制应急响应任务书,交由决策者进行任务书审核。审核通过后,进行系统转场,制定应急响应任务实施方案,然后执行应急响应飞行任务,开展无人机飞行作业,获取灾区的遥感数据,并将数据快速传输到应急指挥调度中心,由专业技术人员综合分析灾情,形成应急事件的态势评估报告,上报给应急救灾决策部门。最后对数据进行编目存档,并形成任务总结报告,流程结束[13-14]。
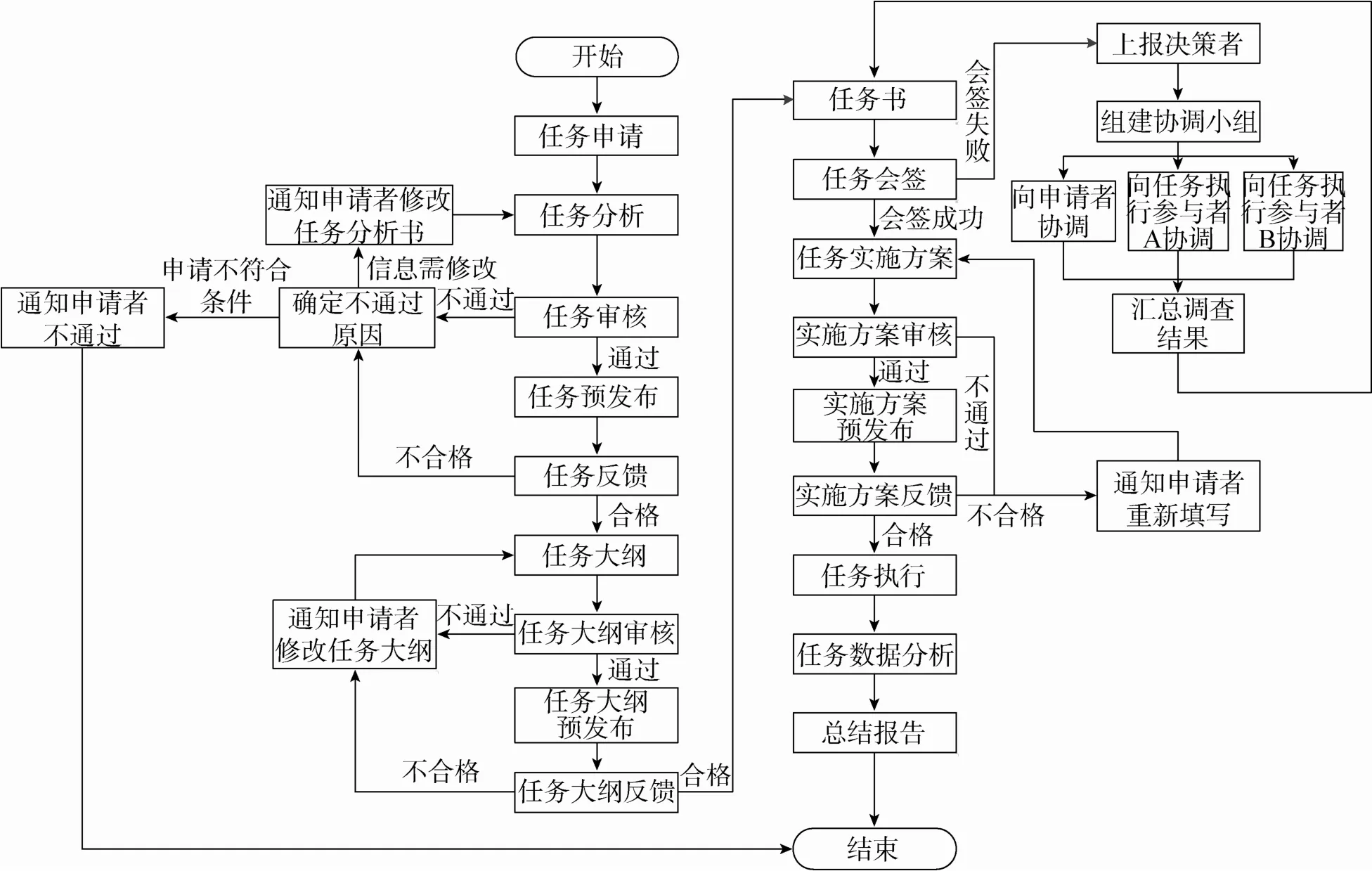
图2 无人机遥感网常规任务调度管理工作流程Fig.2 Regular task dispatch management workflow model of the UAV remote sensing network
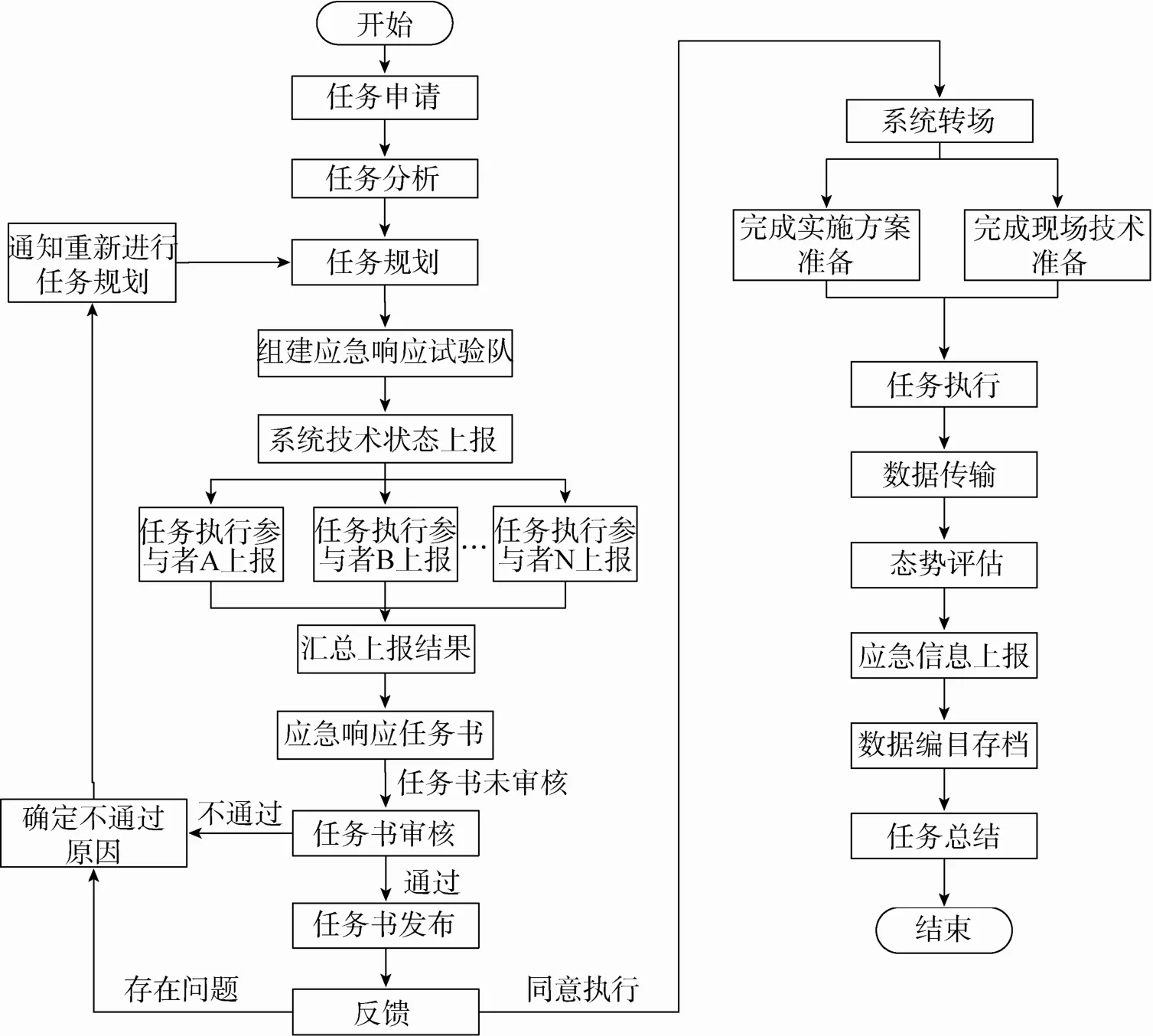
图3 无人机遥感网应急任务调度管理工作流程Fig.3 Emergency task dispatch management workflow model of the UAV remote sensing network
Petri网是由节点和有向弧组成的一种有向图,它有两类节点:一类称为库所,通常用圆圈表示,代表位置、状态、条件等;另一类称为变迁,用方框或粗杠表示,代表工作流中的任务;两类元素之间的连接用有向弧表示,代表工作流的逻辑关联。库所只能和变迁相连,变迁只能和库所相连。Petri网中另一重要元素是托肯(token),代表系统的条件、资源、状态等。
通过将业务运行管理的工作流程映射到 Petri网流程模型的方法,可将无人机遥感网应急调度管理工作流模型转化为如图4所示的Petri网模型。图4中圆圈P1~P25的标识表示库所名称,i库所表示开始,e库所表示结束。这些库所主要用于反映无人机遥感网任务之间资源的传递,包括无人机、人员、任务单等,因其具体含义对分析该模型的正确性关系不大,在此不作赘述。扁矩形T1~T24的标识表示变迁名称,分别对应图3流程中各任务节点,例如T1代表无人机遥感网应急任务申请,T2代表填写和提交任务分析。
2.2 模型的化简与验证
Petri网不仅为系统建模提供了形式化的表达方法,而且具有丰富的分析和验证手段,例如基于状态方程的代数分析方法、基于可达性的图分析方法、基于化简的归纳分析方法等。一个工作流过程的合理性是指工作流建立的模型过程正确,不会出现死锁、运行结果不正确等现象[15-16]。
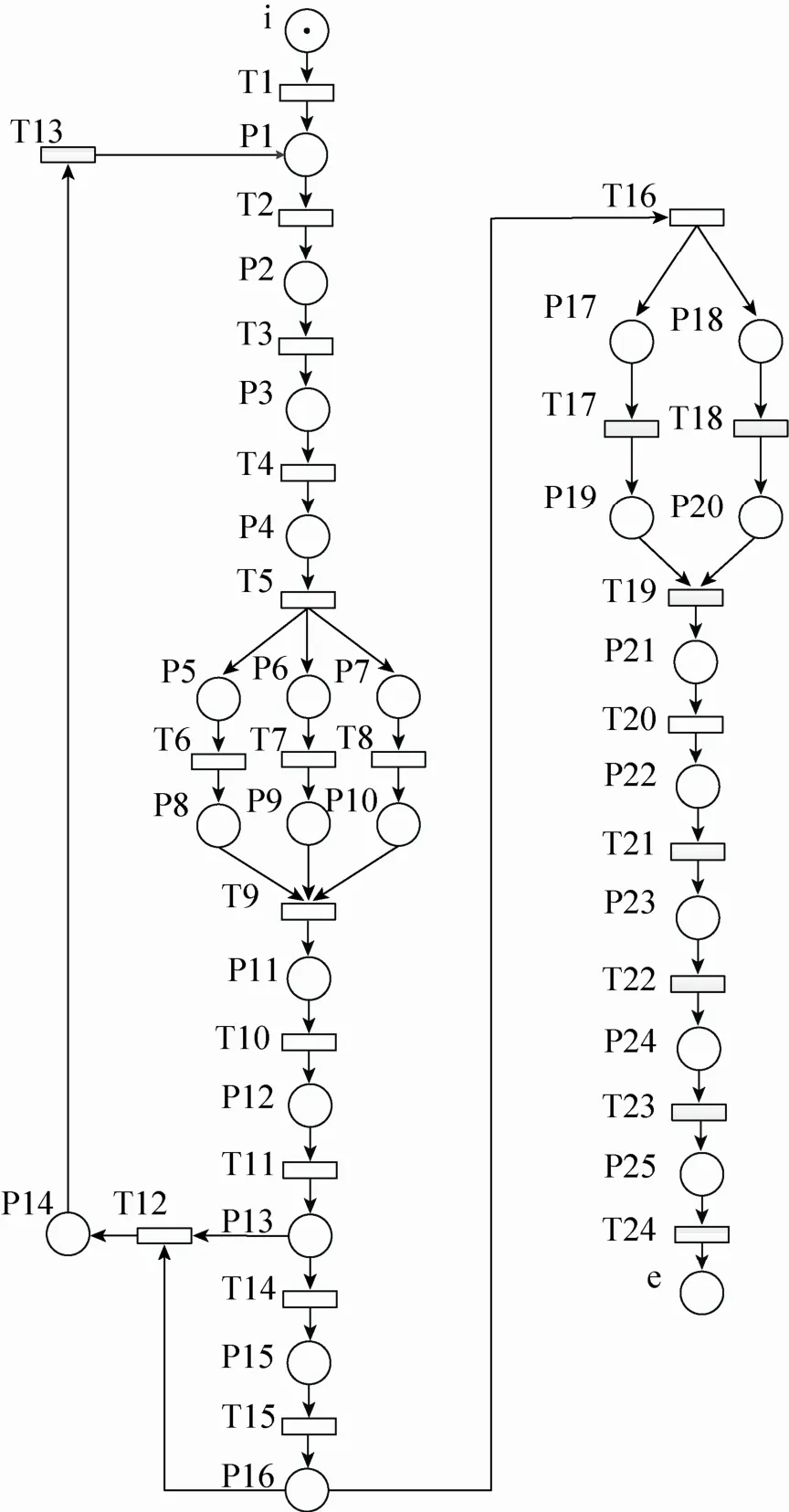
图4 无人机遥感网应急调度管理Petri网模型Fig.4 Petri net model of the emergency response dispatch management system of UAV remote sensing network
对图 4所示的无人机遥感网应急调度管理系统Petri网模型进行合理性的验证的主要依据如下:1)模型必须有一个开始库所和一个结束库所,结束库所是从开始库所可达的唯一最终状态,每个库所和变迁都在一条从开始库所到结束库所的路径上;2)在任何情况下,工作流总能终止,而且在终止的时候,每个实例在结束库所中只有一个托肯,其它库所中没有该实例的托肯存在;3)在所得Petri网中不存在死变迁,每个变迁都可能被执行到。
本文采用化简分析技术,分析该模型的合理性。该方法可在保持模型特性的前提下,将模型缩小到适当规模,降低验证的复杂度;另外,如果在工作流的过程模型中存在死锁或结构上的冲突等问题,在图形化简过程中很容易检测到产生这种问题的原因。
化简规则如图5所示,该方法可以在有限时间内将具有活性和有界性的自由选择扩展工作流网化简为只有一个库所和变迁的自闭环网,或者将工作流网化简为一个简单的顺序结构,从而快速完成模型的合理性验证[17-18]。
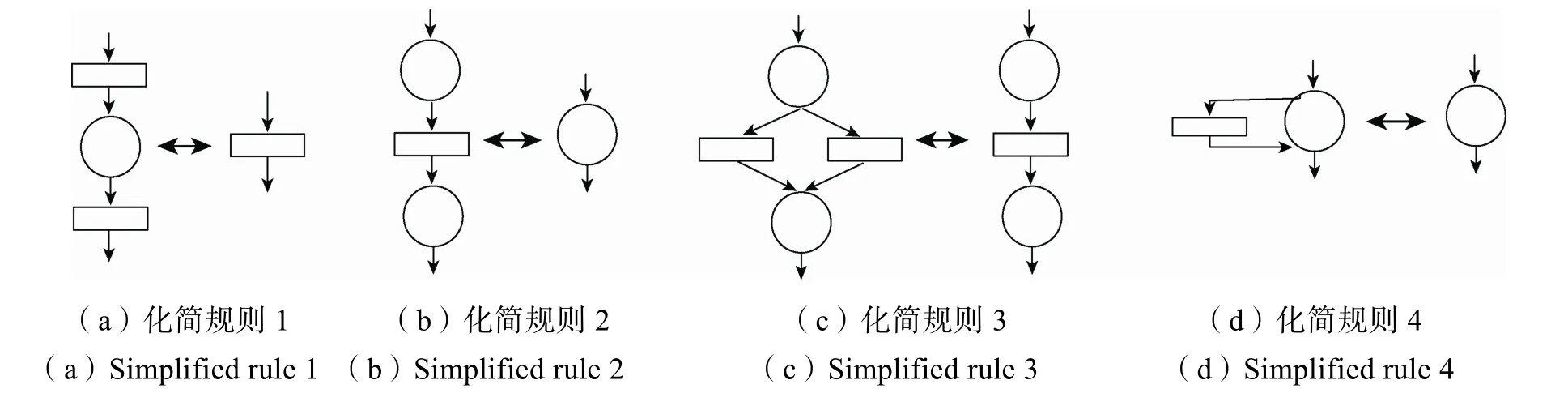
图5 Petri网模型化简规则Fig.5 Simplification rules of the Petri net model
根据上述Petri网模型的合理性验证方法,对无人机遥感网应急调度管理系统Petri网模型进行验证。首先根据图5所示化简规则对模型进行化简(化简过程中产生的模型如图6所示):
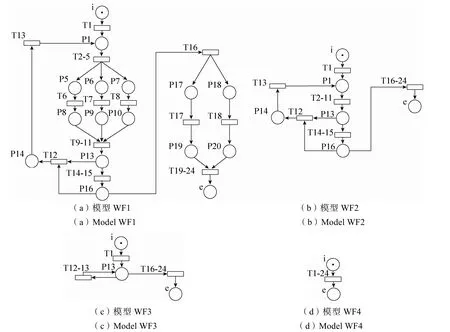
图6 Petri网模型化简过程Fig.6 Reduction process of the Petri net model
1)根据化简规则1,消去库所P2、P3、P4、P5,合并变迁T2、T3、T4、T5,记为T2-5;同理消去库所P11、P12、P15、P21、P22、P23、P24、P15,得到简化模型记为WF1;
2)根据化简规则2,消去变迁T6、T7、T8,T17、T18,根据化简规则3,P5、P6、P7为并行结构,与前置变迁T2-5和后置变迁T9化简为一个变迁,记为T2-9,同理消去T17和T18构成的并行结构,得到简化模型记为WF2;
3)根据化简规则3,消去库所P14,根据化简规则2,消去变迁T14-15,T2-11,简化后的模型记为WF3;
4)根据化简规则4,消去变迁T12-13,根据化简规则1,消去库所P13,得到最终的模型化简结构WF4。
通过上述化简过程,将图4所示的无人机遥感网应急调度管理系统Petri网模型化简为简单的顺序结构。所以,该工作流Petri网模型是满足合理性要求的。
3 系统设计与实现
3.1 系统结构设计
无人机遥感网应急调度管理业务是基于各类业务数据库和系统数据库,为客户端的用户提供相应的工作流服务,根据这样的特点,本文将应急调度管理系统的框架结构分为3层:应用层、服务层和数据层。系统框架结构如图7所示。
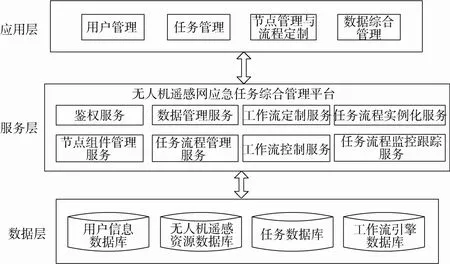
图7 无人机遥感网应急调度管理系统框架结构Fig.7 Frame structure of the emergency response dispatch management system of the UAV remote sensing network
应用层主要为无人机遥感网应急调度管理的参与者提供管理操作的功能,包括用户管理、任务管理、节点管理与流程定制以及数据综合管理,应急调度管理参与者包括系统管理员、任务申请者和审核者等。
服务层是系统的核心层,主要为基于工作流的无人机遥感网应急调度管理提供基本的服务功能,包括用户权限鉴别服务、数据管理服务、节点组件管理服务、任务流程管理服务、工作流定制服务、工作流流程控制服务、流程实例化服务和任务流程监控跟踪服务等。
数据层是系统的数据支撑层,主要以关系数据库为基础提供数据的存取服务,存取的数据分为用户信息数据库、无人机遥感资源数据库、任务数据库和工作流引擎数据库等。
3.2系统功能与实现
本文的无人机遥感应急调度管理系统采用B/S结构,整个系统使用Myeclipse开发,开发语言采用Java和JSP,工作流引擎采用 JBPM4开发实现,后台数据库为Oracle,系统的客户端支持主流浏览器软件,如IE、Chrome、Firefox等。
根据无人机遥感网应急调度管理中不同参与者的身份,管理员可定义不同的角色名称,每个角色操作权限各不相同。在申请任务时,本系统通过可视化的方法,从工作流引擎数据库中选取代表应急调度管理工作流模型节点的节点组件,根据工作流模型定制出任务工作流模板。然后以工作流模板为基础,通过任务申请者申请无人机遥感网应急任务实例化工作流模板,系统在后台记录任务流程实例的ID,将实例化的任务申请信息通过任务流程管理服务存入任务数据库,并与任务工作流程模板自动关联。接着,工作流引擎根据工作流模板、当前的工作流节点状态和输入的数据,按照预定义的规则实现工作流程节点的流转,从而实现无人机遥感网应急调度的全过程管理。
根据前文建立的模型,系统向用户提供无人机遥感网应急任务流程界面,一方面描述该流程包含的全部任务节点,另一方面红框标记的节点表示流程执行到该节点,每个节点都可链接到与之对应的功能界面。任务申请节点的接口,接收任务申请信息,任务书节点辅助用户确定参与执行任务的遥感载荷、无人机资源、飞行航线和支撑条件等,制定出任务参与者的工作要求,形成任务书分发给各任务参与者。任务参与者对各自承担的任务要求进行反馈。系统状态上报节点包括了组织所有的任务参与者上报其负责的系统状态并汇总。系统通过图形化手段显示任务的执行状态和走向,依照每个任务节点的属性规划了任务走向、路径路由等,并包含了完成、回退等功能。
本文建立了清晰、可控的无人机遥感资源调度管理平台,使参与任务的执行部门有序地协同开展工作,提高了无人机遥感网各职能部门的协作能力;同时任务管理人员对任务执行规程和状态一目了然,有效提升了工作效率和管理水平。该系统成功部署并应用于无人机遥感网试验验证任务,实现了 7×24小时稳定无故障运行,满足无人机遥感网任务调度需求,验证了系统在有效性、易操作性、可靠性等方面的能力。
4 结束语
本文使用目前流行的轻量级工作流技术,结合文字、图表等多种表现形式,设计开发了一套基于JBPM 的无人机遥感网应急调度管理系统,为无人机遥感网业务运行提供了一种网络化的反馈式互动在线调度管理平台。与一般的任务管理系统相比,本文提供的基于工作流的可视化管理模式,不仅将无人机遥感网应急调度管理的业务流程及其运行状态直观地展示给用户,而且实现了无人机遥感网应急任务调度的全生命周期管理,为用户提供了直观、便捷操作与运行维护的环境。同时,系统提供的工作流定制功能,还可以方便用户根据应急业务流程的演化情况更新应急调度管理工作流模型,仅需开发新的关键管理节点组件即可,降低了系统与实际业务逻辑的耦合度。运行结果表明,该系统达到了设计的预期效果,具有更好的通用性、可扩展性、稳定性以及适应业务逻辑演化的能力。
References)
[1]李德仁, 李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报: 信息科学版, 2014, 39(5): 505-513. LI Deren, LI Ming. Research Advance and Application Prospect of Unmanned Aerial Vehicle Remote Sensing System[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513. (in Chinese)
[2]李传荣, 汪超亮, 刘俊先, 等. 空间数据获取与应用应急协同系统[C]//国家减灾委员会. 国家综合防灾减灾与可持续发展论坛论文集: 2010年卷, 2010: 100-104. LI Chuanrong, WANG Chaoliang, LIU Junxian, et al. Spatial data Acquisition and Application Coordination System for Emergency Response[C]//China National Commission for Disaster Reduction. National Comprehensive Disaster Prevention and Mitigation and Sustainable Development Forum in 2010, 2010: 100-104. (in Chinese)
[3]段鹏飞, 范斌, 项卫国. 某无人机光电平台隔振设计及试验分析[J]. 航天返回与遥感, 2013, 33(5): 39-46. DUAN Pengfei, FAN Bin, XIANG Weiguo. Vibration Isolation Design and Test Analysis of Opti-electronic Platform for a UAV[J]. Spacecraft Recovery & Remote Sensing, 2013, 33(5): 39-46. (in Chinese)
[4]DUGAN J P, PIOTROWSKI C C. Developmental System for Maritime Rapid Environmental Assessment Using UAVs[C]// Proc. of Oceanology Intl. 2000, Session on Rapid Environmental Assessment. Brighton, UK, 2000: 201-211.
[5]范玉顺. 工作流管理技术基础[M]. 北京: 清华大学出版社, 2001. FAN Yushun. Workflow Management Technology[M]. Beijing: Tsinghua University press, 2001. (in Chinese)
[6]The JBoss JBPM Team. jBPM Documentation[EB/OL]. [2014-03]. http://209.132.179.119:8080/job/kie-docs/lastStable Build/artifact/jbpm-docs/target/docbook/publish/en-US/html/index.html.
[7]陈洪娜, 祖旭, 周峰. 工作流技术研究发展状况、研究内容及趋势[J]. 重庆工学院学报, 2006, 20(2): 65-69. CHEN Hongna, ZU Xu, ZHOU Feng. On the Developing Situation, Research Content and Trend of Workflow Technology[J]. Journal of Chongqing Institute of Technology, 2006, 20(2): 65-69. (in Chinese)
[8]贾迪楠. 基于jBPM的可定制流程的办公系统的设计与实现[D]. 北京: 北京邮电大学, 2010. JIA Di’nan. Design and Implementation of Office Systems Customizable Based on JBPM Process[D]. Beijing: Beijing University of Post and Telecommunication, 2010. (in Chinese)
[9]商宏杰. 基于jBPM的测绘生产管理系统的设计与实现[D]. 兰州: 兰州大学, 2009. SHANG Hongjie. Design and Implementation of Surveying and Mapping Production Management System Based on JBPM [D]. Lanzhou: Lanzhou University, 2009. (in Chinese)
[10]傅明, 张玮. 基于J2EE开源工作流引擎JBPM的设计实现[J]. 计算技术与自动化, 2008, 27(4): 111-114. FU Ming, ZHANG Wei. Open Source J2EE-based Work-flow Engine JBPM Design and Implementation[J]. Computing Technology and Automation, 2008, 27(4): 111-114. (in Chinese)
[11]袁崇义. Petri网原理与应用[M]. 北京: 电子工业出版社, 2005: 32-178. YUAN Chongyi. Principle and Application of Petri Net[M]. Beijing: Electronic Industry Publishing House, 2005: 32-178. (in Chinese)
[12]曹华文, 李传荣, 李子扬. 基于 Petri网的遥感卫星业务运行管理单元模型设计与仿真[J]. 科学技术与工程, 2012, 20(26): 6628-6633. (in Chinese) CAO Huawen, LI Chuanrong, LI Ziyang. Design and Simulation for Operation and Management Unit Model of Remote Sensing Satellite Based on Petri Net[J]. Science Technology and Engineering, 2012, 20(26): 6628-6633. (in Chinese)
[13]李传荣. 无人机遥感载荷综合验证系统技术[M]. 北京: 科学出版社, 2014. LI Chuanrong. The Technology of Unmanned Aerial Vehicle Remote Sensing System[M]. Beijing: Science Press, 2014. (in Chinese)
[14]崔甜, 刘建波, 刘士彬. 基于工作流的遥感数据存档系统[J]. 微计算机信息, 2009, 25(12): 124-126. CUI Tian, LIU Jianbo, LIU Shibin. A Remote Sensing Data Archiving System Based on Workflow[J]. Microcomputer Information, 2009, 25(12): 124-126. (in Chinese)
[15]程建军. 基于 Petri 网的研究生培养工作流模型[J]. 合肥工业大学学报:自然科学版, 2009, 32(1): 78-81. CHENG Jianjun. Graduate Cultivation Workflow Model Based on Petri Nets [J]. Journal of Hefei University of Technology, 2009, 32(1): 78-81. (in Chinese)
[16]戴月明, 吴军, 钱雪忠, 等. 基于工作流的电力生产管理信息系统设计实现[J]. 微计算机信息, 2006, 22(18): 169-171. DAI Yueming, WU Jun, QIAN Xuezhong, et al. The Design & Implementation of Power Production MIS Based on Workflow[J]. Microcomputer Information, 2006, 22(18): 169-171. (in Chinese)
[17]廖敏, 殷国富, 罗中先. 基于 Petri 网的制造资源调度工作流模型研究[J]. 计算机集成制造系统, 2004, 10(9): 1056-1061. LIAO Min, YIN Guofu, LUO Zhongxian. Research on Workflow Model of Manufactural Resource Scheduling Using Petri Net[J]. Computer Integrated Manufacturing Systems, 2004, 10(9): 1056-1061. (in Chinese)
[18]潘启澍, 姜兵. 基于 Petri 网的工作流建模技术及应用[J]. 清华大学学报: 自然科学版, 2000, 40(9): 86-89. PAN Qishu, JIANG Bing. Petri Net Based Workflow Modeling Techniques and Applications[J]. Journal of Tsinghua University (Science &Technology), 2000, 40(9): 86-89. (in Chinese)
Application of JBPM in Emergency Dispatch Management for UAV Remote Sensing Network
TIAN Wenxin1,2WANG Chaoliang1DOU Shuai1LI Ziyang1
(1 Academy of Opto-Electronics, Key Laboratory of Quantitative Remote Sensing Information Technology,
Chinese Academy of Sciences, Beijing 100094, China)
(2 University of Chinese Academy of Sciences, Beijing 100049, China)
Recently UAVs play an irreplaceable role in the fields of obtaining spatial data of emergency response. On the basis of collecting the UAV remote sensing resources which can be used for emergency and building the network of distributed UAV remote sensing services, in order to ensure that the network operates efficiently, the paper establishes an emergency response dispatch management system of UAV remote sensing network to achieve a unified configuration under the emergency conditions. Firstly, based on the Java Business Process Management (JBPM for short) engine, the paper introduces the basic concepts and framework of JBPM, and discusses the typical workflow of the emergency scheduling management of the UAV remote sensing network. Secondly, combining Petri nets theory, the paper establishes a hierarchical model of emergency scheduling management task, and validated the correctness of the model. Finally, emergency response dispatch management system for UAV remote sensing network based on JBPM, achieving the purpose of lifecycle management of emergency response task. The system is deployed and applied successfully in the validation task ofUAV remote sensing network. It not only meets the requirements of remote sensing network dispatch task, but also operates stably for many hours, providing an online scheduling feedback management platform for UAV remote sensing network.
JBPM engine; Petri nets; emergency dispatch management; unmanned air vehicle; remote sensing network
TP315
: A
: 1009-8518(2016)05-0102-09
10.3969/j.issn.1009-8518.2016.05.012
田汶鑫,女,1990年生,2016年6月获中国科学院大学电子与通信工程专业硕士学位。研究方向为遥感技术与应用。E-mail:tianwenxin@aoe.ac.cn。
(编辑:夏淑密)
2016-03-22
国家863计划(项目编号:2013AA122105)
猜你喜欢
小学生学习指导(高年级)(2022年10期)2022-11-04
吉林大学学报(信息科学版)(2022年2期)2022-08-15
计算机测量与控制(2022年2期)2022-03-30
铁道通信信号(2020年10期)2020-02-07
电子制作(2019年20期)2019-12-04
北京航空航天大学学报(2019年9期)2019-10-26
计算机测量与控制(2019年6期)2019-06-27
中学课程辅导·高考版(2019年4期)2019-04-25
科技与管理(2014年5期)2015-01-06
计算技术与自动化(2014年1期)2014-12-12