地球静止轨道高分辨率相机系统控制技术应用
2016-02-23 03:42唐士建张东浩柴凤萍
航天返回与遥感 2016年5期
唐士建 张东浩 柴凤萍
(北京空间机电研究所,北京 100094)
地球静止轨道高分辨率相机系统控制技术应用
唐士建 张东浩 柴凤萍
(北京空间机电研究所,北京 100094)
“高分四号”卫星于2015年12月发射成功,主载荷高分辨率相机可解决低轨卫星相机不能满足突变的或连续的自然灾害、恶劣气象等的观测需求问题。要在高约36 000km静止轨道实现快速、连续、可靠、稳定的目标观测,除了具备高性能的高分辨率探测器及其视频处理电路等外,也必须具备相机系统控制技术的管理控制设备来实现相机分系统内部资源的有序调配和系统成像控制。文章介绍了专门针对“高分四号”卫星静止轨道高分辨率相机的管理控制设备的系统构架;推荐了一种新型的高轨相机多元冗余的长寿命运动机构控制架构,并详细介绍了基于该运动机构控制架构的在轨红外定标自主式流程控制和在轨旋转滤光自主式变速控制的新方法;最后,重点阐述了可见光多模式成像控制、红外自动成像模式控制、红外成像保护控制和黑体温度自主控制等多项相机系统控制新技术应用。该文成果在系统可靠性框架、自主控制、软件容错等技术方面可为后续型号产品的研制提供借鉴。
自主控制 高分辨率相机 地球静止轨道 “高分四号”卫星
0 引言
“高分四号”卫星是我国成功发射的首颗地球静止轨道高分辨率光学成像卫星,主载荷光学遥感相机是目前我国地球静止轨道对地观测空间分辨率最高、视场最宽的光学遥感器。相机配置了可见光红外和中波红外成像通道,既可对定点区域实现全天时、全天候的凝视观测,也可对突发事件进行应急观测,能够满足灾害风险预警预报、林火灾害监测、地震构造信息提取和气象天气监测等各种业务需求[1-5],有效地弥补了中低轨道遥感器重访周期长、相对视场小等方面的不足,对我国天基观测网络系统的构建和完善具有举足轻重的作用。
“高分四号”卫星相机优越性能的实现,不仅因为具有先进的光机设计理念,还具备了极具创新性的、强大的电子学系统设计做后盾。管理控制设备作为整个相机载荷分系统控制核心,既是连接卫星平台以及相机分系统内部设备之间交流的纽带,也是实现整个分系统任务管理和调度的核心。针对相机系统控制方面,国内研究者们已经在借助图像数据进行红外成像在轨辐射定标、多光谱成像控制、常见温度控制系统和相机温度解算等方面进行过相关的研究,也已有一定的研究基础,而“高分四号”卫星相机管理控制设备针对静止轨道应用特点实现了相机更优越的性能。本文重点围绕“高分四号”卫星相机管理控制设备在运动部件可靠性、自主控制、可见光成像和红外成像等几个方面的突出应用特点展开介绍。
1 相机控制架构
相机的管理控制设备为相机载荷分系统控制核心,除了完成数据交换、能源分配和状态监测等基本功能外[6],管理控制设备还需实现地球静止轨道特殊及复杂相机系统控制技术(包括高可靠的运动机构自主控制技术、可见光多模式成像控制技术和红外成像自主控制技术等),才能够充分满足“高分四号”卫星静止轨道高分辨率相机对地面快速、连续、可靠、稳定的目标观测的需求。相机管理控制系统组成框图如图1所示。
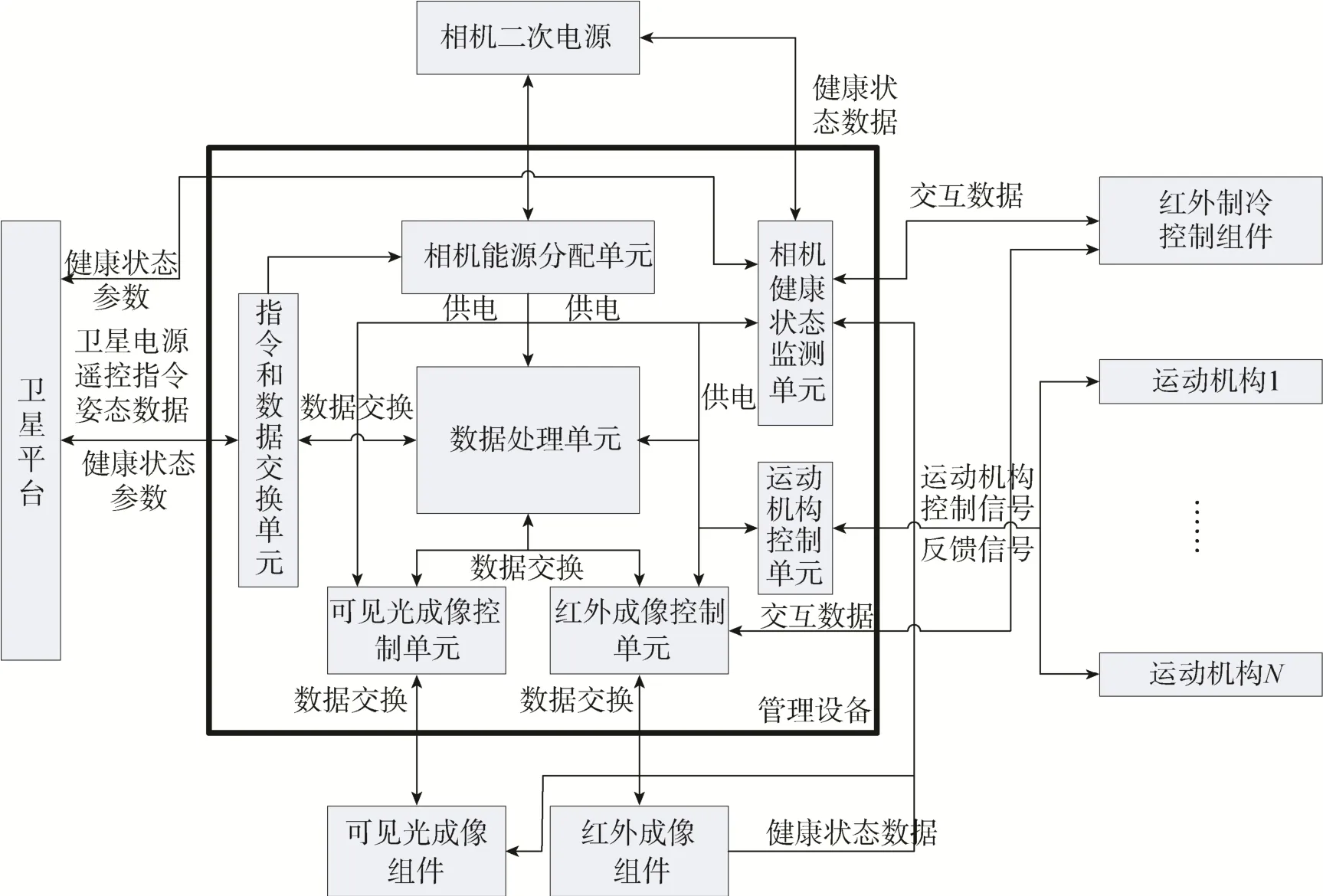
图1 相机管理控制系统组成框图Fig.1 Block diagram of the management and control system of camera
高可靠的运动机构控制技术借助多元冗余的运动机构控制构架进行多机构可靠的控制,由数据处理单元和运动机构控制单元实现星上定标机构自主流程控制和旋转滤光运动机构变速控制;可见光多模式成像控制技术凭借数据处理单元和可见光成像控制单元实现相机可见光通道的单拍、连拍、准视频成像等多种模式控制,红外成像自主控制技术依靠数据处理单元和红外成像控制单元实现自动红外成像模式、红外成像保护机制和黑体控温自主控制等。
2 运动机构可靠控制
2.1多元冗余的运动机构控制架构
空间辐射影响和故障模式是航天器电子学单机进行可靠性设计要考虑的重要问题,地球静止轨道的空间辐射环境也尤为复杂[7]。在静止轨道中CMOS器件的单粒子锁定(Single Event Latchup,SEL)以及功率晶体管的单粒子烧毁(Single Event Burnout,SEB)和单粒子栅穿(Single Event Gate Rupture,SEGR)等失效模式可能会导致CMOS器件和功率晶体管发生不可逆的故障[8-11]。因此,单纯依赖CMOS器件和功率晶体管自身抗单粒子能力来实现产品可靠性是不够的,还要从电路设计角度进行防护。
管理控制设备采用CMOS器件和功率管等实现多种运动机构的综合控制。为实现高轨、高可靠的机构控制,管理控制设备创新设计了一种多元冗余的运动机构控制构架,防止空间辐照效应或其他原因导致电路功能失效,以提高产品的可靠性。
每种机构控制链路包括:配电控制、功率电源、合并环节、功率限流、功率驱动和逻辑控制等多个部件,如图2所示,标有“主”或“备”的部件为“主”或“备”加电工作时,“备”或“主”处于不加电状态。在运动机构控制框架中,除了功率驱动部分内部的多个功率管之间串并联冗余外,还包括功率电源和逻辑控制电路之间可交叉冗余、功率电源和功率驱动之间交叉冗余、功率限流之间相互冗余等。上述由多个运动机构控制链路构成的系统称为多元冗余的运动机构控制架构。该目的是保证各环节在空间单离子效应导致某环节的某个器件失效的情况下,机构控制系统仍能可靠工作或通过切换仍能可靠工作,该机构控制方案可为高轨相机多复杂机构的长寿命控制提供长期保障。
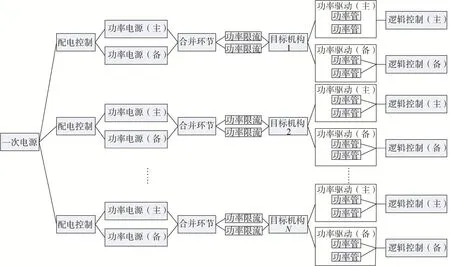
图2 多元冗余的运动机构控制架构Fig.2 Block diagram of controlling multiple redundance mechanism
2.2在轨红外定标自主式流程控制
遥感相机红外成像需要进行辐射定标,其中一种方式就是在轨辐射校正[12-13]。管理控制设备负责控制定标运动机构适时参与红外成像的在轨辐射定标工作。在轨定标工作开展,除了具备多元冗余架构来保证架构的可靠动作,还开创了一套自主式的在轨红外定标控制流程,在红外成像流程中适时切入和自动退出,在发射、变轨过程或不可抗拒的外部原因等导致机构位置偏离时,运动机构控制单元再次工作时自动调整定标机构回到初始位置,以实现红外辐射定标的自主控制。
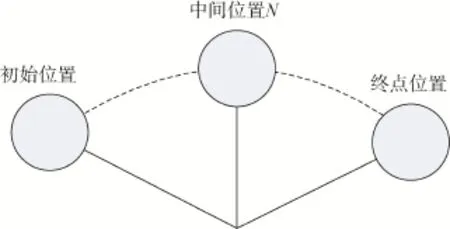
图3 定标机构位置示意Fig.3 Position of calibration mechanism
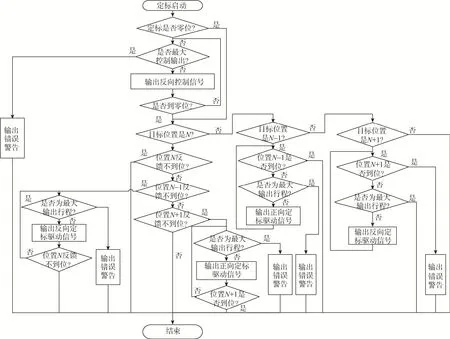
图4 红外辐射定标自主控制流程Fig.4 Autonomous control flow graph of infrared radiation calibration
定标运动机构位置示意如图3所示,包括初始位置、……、中间位置N、……、终点位置等有效位置。红外定标控制流程如图 4所示,当自动红外成像或分步红外成像执行至定标运动机构加电时(自动红外成像流程见4.1节),管理控制设备启动定标机构自主回零机制,识别定标机构位置:若定标机构处在零位,则不控制输出;若识别机构处于其他有效位置或非有效位置位置,则自主识别机构所处位置区间,使定标机构回到有效位置后再控制机构返回初始位置;若无法识别是否到达初始位置,设置最大控制行程,保护机构不被损坏,并反馈错误信号。
当定标运动机构目标位置为中间位置N时,当前位置若满足目标位置则不控制输出;若当前位置是非目标位置的其他有效位置,则控制机构运动到目标位置;若当前位置为非有效位置,先自主识别有效位置区间,再从最近的有效位置运动到目标位置;若无法识别到目标位置,设置最大控制行程,保护机构不被损坏,并反馈错误信号。
当定标运动机构目标位置为终点位置时,若满足目标位置则不控制输出;若当前位置是非终点位置,先自主识别有效地位置区间(识别过程设置最大控制行程,保护机构超过终点位置不被损坏)并运动到最近有效位置,再运动到终点位置;若无法识别终点位置,设置最大控制行程,保护机构不被损坏,并反馈错误信号。
2.3 在轨旋转滤光自主式变速控制
针对“高分四号”卫星地球静止轨道高分辨率可见光成像特点,相机需要进行星上大尺寸旋转滤光运动机构控制以切换不同谱段的光进入光路,同时结合相机不同的拍照模式,实现可见光通道多模式成像。
管理控制设备在多核数据处理单元调度下,基于第 2.1节的控制框架设计了一种星上大尺寸旋转滤光运动机构控制技术。星上大尺寸旋转滤光控制主要包括自主复位控制、任意谱段自主切换控制和变速控制等。当管理控制设备加电或收到复位指令后,将旋转滤光运动机构进行自主复位,复位过程依靠位置反馈进行多次顺时针和逆时针控制而最终确定,复位过程的位置反馈信号也要进行多次判读,避免干扰信号造成的误判,保证可靠复位。
旋转滤光运动机构也具有多个位置,示意图如图5所示,从一个位置到另外一个位置时有两条途径,但仅有一条是最短路径。因此,在收到任意谱段切换指令后,自主计算出最短路径,以实现最高效率的谱段切换。
由于旋转滤光运动机构尺寸较大,在系统运动时折算转动惯量较大,同时系统对谱段切换还有较高的时间要求,为了解决上述问题,在控制方式上采用了变速控制,如图6所示。在系统启动后,逐步加速,保证了驱动电机输出足够的转动惯量,当滤光片达到足够的转速后保持匀速运动状态。为了防止过冲,当切换快要到位时,逐步降低转速。旋转滤光机构转速加速度、时间以及匀速运动频率均需要根据谱段特性进行计算。变速控制既能保证驱动电机输出足够的转动惯量又能节约谱段间切换时间,有效保证了星上大尺寸旋转滤光运动机构的可靠控制。
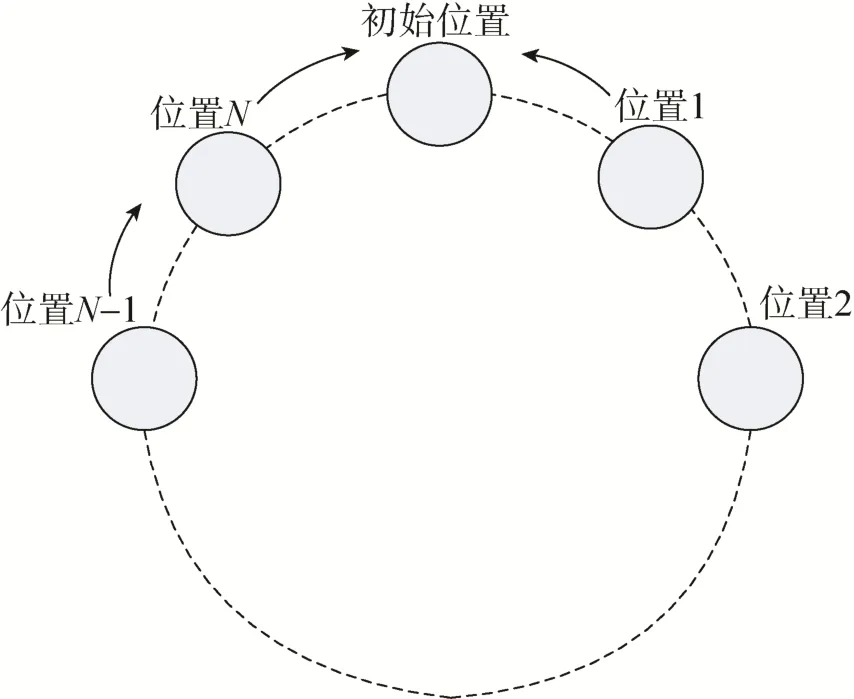
图5 旋转滤光机构位置示意Fig.5 Position of the spectral filter mechanism
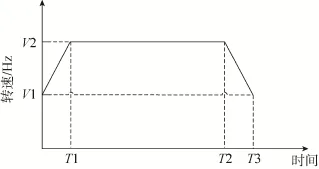
图6 旋转滤光机构速度控制曲线Fig.6 Speed curve of the spectral filter mechanism
管理控制设备突破了旋转滤光谱段多、模式复杂、谱段迅速切换和转动惯量大等多项难点,在保证相机可见光成像前提下的实现滤光轮自主切换控制,为静止轨道可见光可靠成像提供保障。
3 可见光多模式成像
“高分四号”卫星静止轨道高分辨率相机可见光成像采用凝视成像方式,针对可见光成像特点,突破传统单一成像模式,设置了多种在轨成像模式,如单拍、连拍以及与多种谱段结合成像等多种模式。多光谱多模式的可见光成像是通过在光路中不断切换载有不同波长滤光片机构来实现的[14]。
在 2.3节中,介绍的在轨旋转滤光机构自主式变速控制技术为“高分四号”卫星相机实现高分辨率可见光多模式成像的关键技术。在管理控制设备控制下,根据地面发送的在轨成像子模式,可实现秒级的单拍、连拍、多谱段单拍、准视频成像等成像模式。多种成像模式控制特点见表1所示,单拍模式用时最短,对特殊目标进行短时成像,同时可通过切换谱段对不同光谱特点的目标进行成像,获取用户更关心的目标特征,适用于突发事件的目标探测。连拍、准视频成像模式可以实现对目标的连续观测,适用于观察大气、海洋和陆地渐变过程。
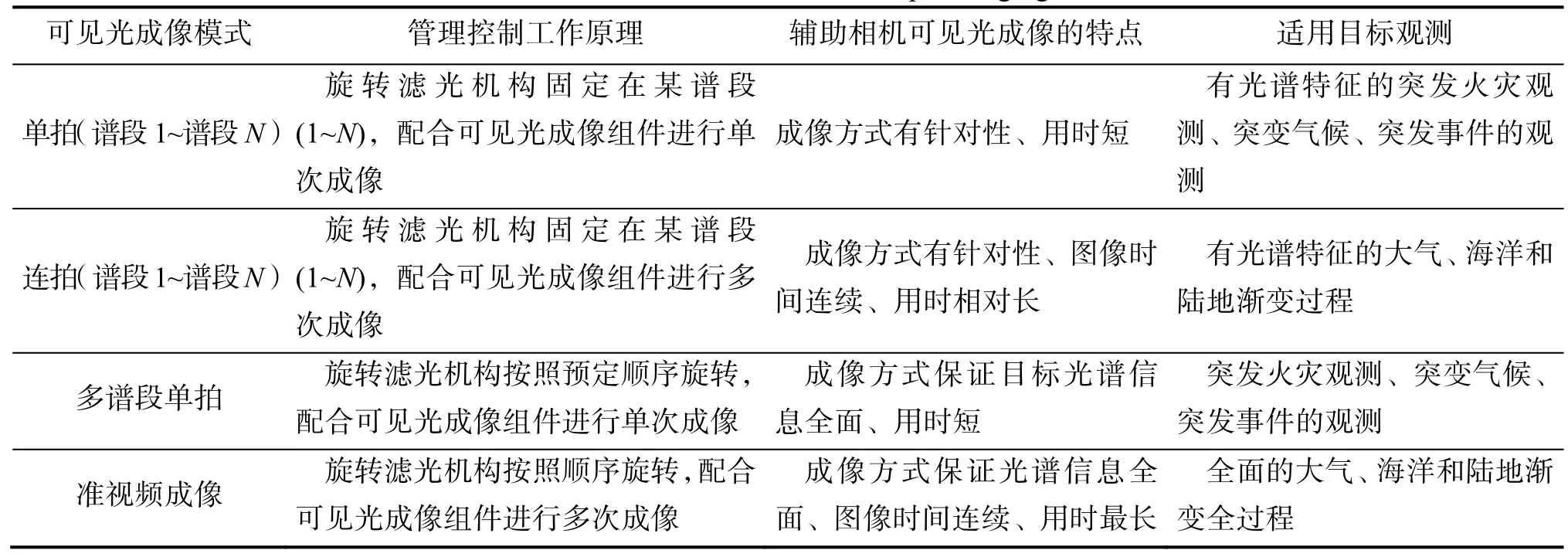
表1 相机多种成像模式控制特点Tab.1 Control characteristics of multiple imaging modes
在可见光多种成像模式中可通过管理控制设备调整积分时间,配合相机可见光成像组件,实现对色彩缤纷、明暗交错的目标进行高清成像,就像具有焦距、光圈和曝光时间调整能力的单反相机一样,“高分四号”卫星相机借助管理控制设备实现了可积分调整,可对焦,可单拍,可连拍,可准视频成像等多功能和多模式应用,成为了新一代多功能、多模式、高轨、高分辨率相机。
4 红外成像自主控制
4.1自动红外成像模式
“高分四号”卫星相机是运行在36 000km轨道高度的地球静止轨道高分辨率相机,其红外成像流程复杂,需要多个设备参与和多项步骤执行。若采用地面指令形式,卫星平台需要发送多条指令完成红外成像,还需要人工进行健康状态诊断和计时,成像过程复杂而且用户使用起来也不便捷,同时,由于需要进行天地闭环控制,红外成像的实时性也会降低。为实现相机快速、连续的红外目标观测,需要成像控制更自主化,管理控制设备针对静止轨道高分辨率红外成像的特殊性,创新实现了相机自动红外成像模式,节省了地面发送指令、人工健康状态诊断和计时等操作时间,提高了红外成像效率。
自动红外成像模式任务流程如图7所示。当管理控制设备接收到用户的红外成像指令后,启动自动红外成像控制程序,根据制冷设备传送的探测器温度数据进行实时判断,达到满足温度范围,由相机能源分配单元对红外成像组件加电,相机按照红外成像控制单元预设成像参数进行红外成像。过程中,管理控制设备捕捉、汇总以及打包相机完整的红外成像数据,并定时自主的下传至卫星辅助数据中。待定标机制启动,通过相机能源分配单元和运动机构控制单元启动控温功能,待黑体温度达到红外探测器辐射定标要求,启动在轨红外定标成像控制。相机红外成像组件按照自动时序在定标机构运动到每个位置后,分别进行初始位置定标成像、……、中间位置N定标成像、……、终点位置定标成像等。定标成像后,即对对地面目标连续观测。观测过程中,用户可根据观测目标对相机成像参数(如积分时间和增益等)进行微调。观测任务结束后,管理控制设备控制相机能源分配单元、运动机构控制单元和红外成像控制单元等部分恢复初始状态,切断不需要工作的部分电源以达到节能效果,结束红外成像自主控制进程。
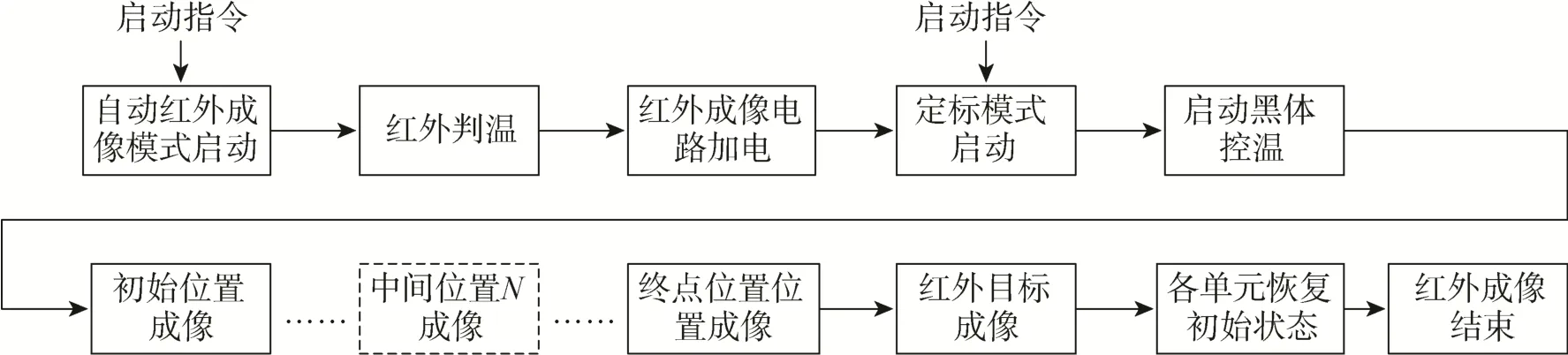
图7 自动红外成像模式流程Fig.7 Flow chart of auto infrared imaging
通过自动红外成像模式,管理控制设备合理安排成像步骤和有序调配应用资源,可以节省用户多条指令和人工判读时间,天地闭环的响应时间可提高数倍。管理控制设备借助自动红外成像模式,控制相机红外成像电路组件,辅助相机迅速将快速、连续的图像呈现在用户面前。
4.2红外成像保护机制
在红外成像过程中,为了保护红外探测器不会因自身工作产生的热量或某些不可抗拒外部原因导致温度过高而损坏,管理控制设备专门研发了一种红外成像保护机制。
在实现自动红外成像或者分步红外成像时,探测器配置的专用制冷设备也开始工作。管理控制设备根据红外制冷控制组件通过内部总线传送的探测器温度数据进行实时判断比较,在探测器各温度参数达到或低于预设的温度阈值,控制相机能源分配单元才对红外成像电路部分加电,避免红外探测器因不满足温度要求就执行了用户的加电指令,而对探测器造成损坏。同理,红外成像过程中,若红外探测器温度过高,会对探测器造成损坏,进而可能导致相机失去红外成像功能,管理控制设备能够观测全程,对探测器温度进行智能判读,一旦探测器温度达到或高于预设最高温度,就控制红外成像控制单元和相机能源分配单元切断红外探测器电源,停止红外成像,及时保护探测器安全,详细的红外成像保护机制流程图如图8所示。另外,加电温度阈值和断电温度阈值均可通过地面指令按照规则进行随机配置,保护温度设置如表2所示。
管理控制设备对红外成像保护机制自身也要采用保护手段,诊断过程要进行多次连续判读,满足条件再进行保护机制启动,若连续采集一定时间仍不满足红外成像条件则停止成像,第一时间向地面用户反馈探测器异常信息。
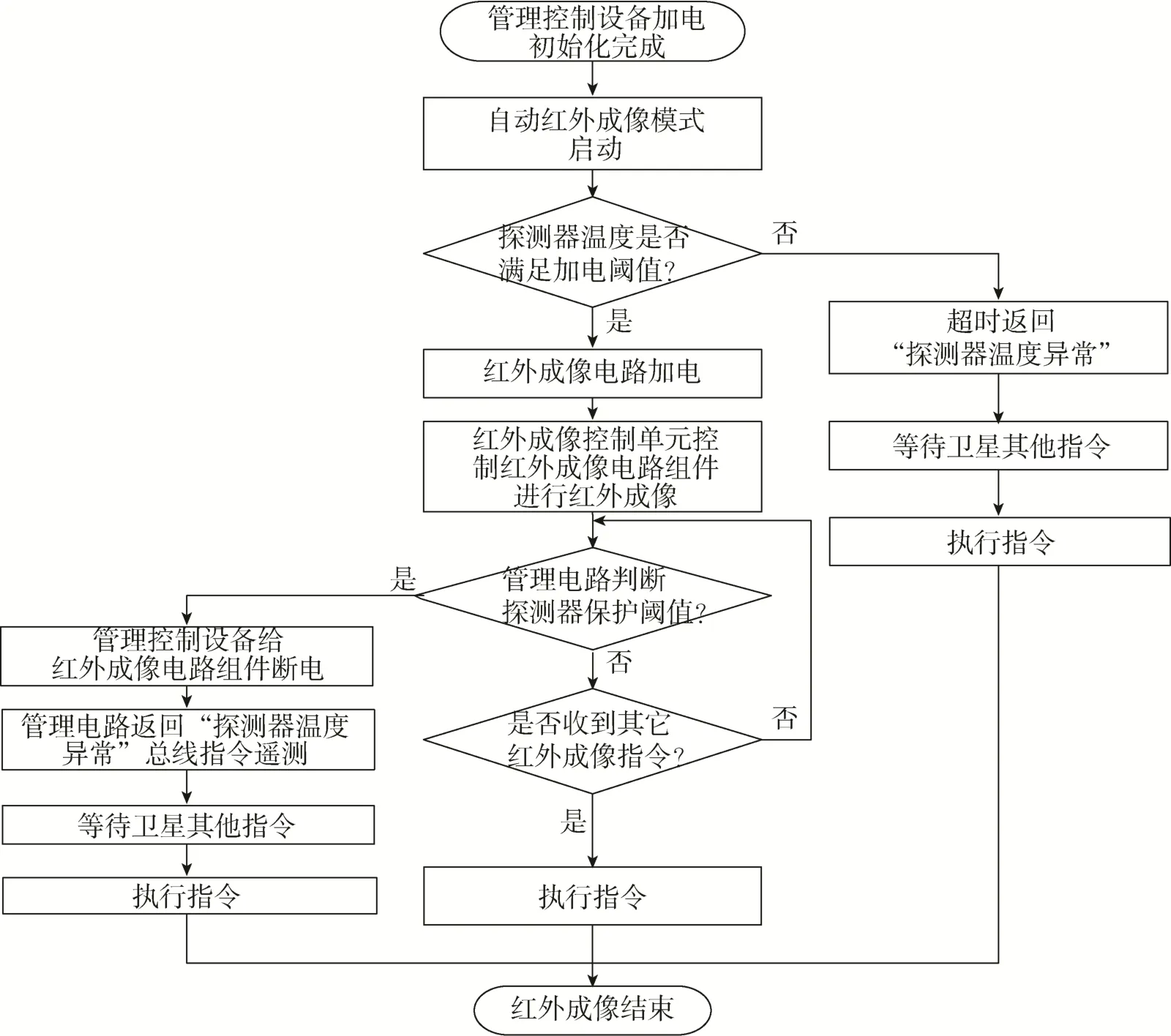
图8 红外成像保护机制流程Fig.8 Flow chart of infrared imaging with safeguard
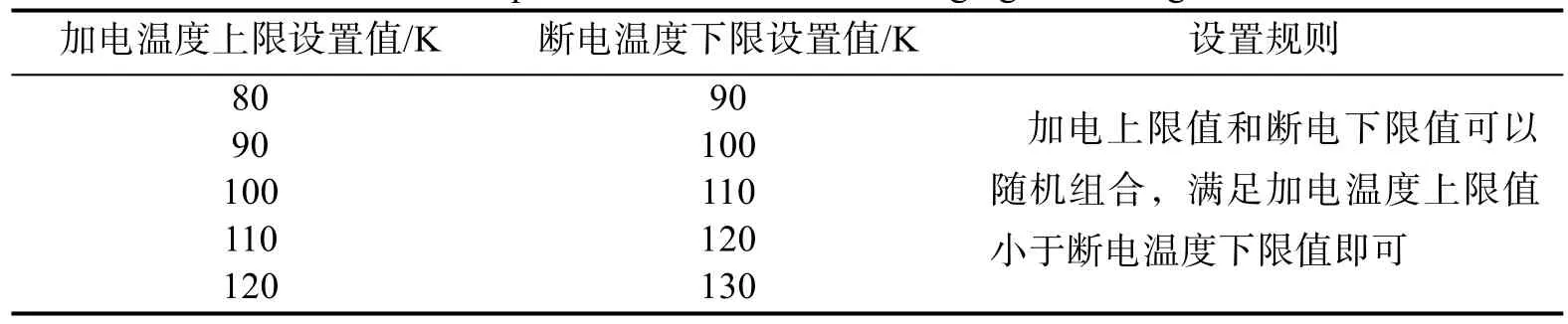
表2 红外成像保护机制温度数据Tab.2 Temperature data of infrared imaging with safeguard
4.3黑体温度自主控制
在实现自动红外成像模式或者分步进行定标成像时,管理控制设备要启动一项重要的工作——定标黑体控温功能。黑体温度到达红外探测器的辐射定标要求,才能保证相机进行清晰的红外成像。
常见的控温方式及对比情况见表3。从对比结果可以看出,开关控温一般适用控温精度较低的场合[15-16],在我国许多工业过程控制、工业温度控制系统、手持或移动式电子设备中仍被使用[16-17],不适用于红外成像的黑体温度控制。PID(Proportional-Integral-Differential,PID)控温多用于智能控制系统中的控温方式,控温精度高,红外成像辐射定标需要对温度点适时在轨配置,也需要进行多路控温,需要温度采集与温度控制进行组合应用[18-20],因此数字PID控温更适合在轨定标黑体控温。根据上述分析,数字PID控温是适合红外成像黑体控温的方式,但相机整体控温方式还是采用时间最优的控制算法,就是将数字开关控温和数字PID控温相结合的方式。
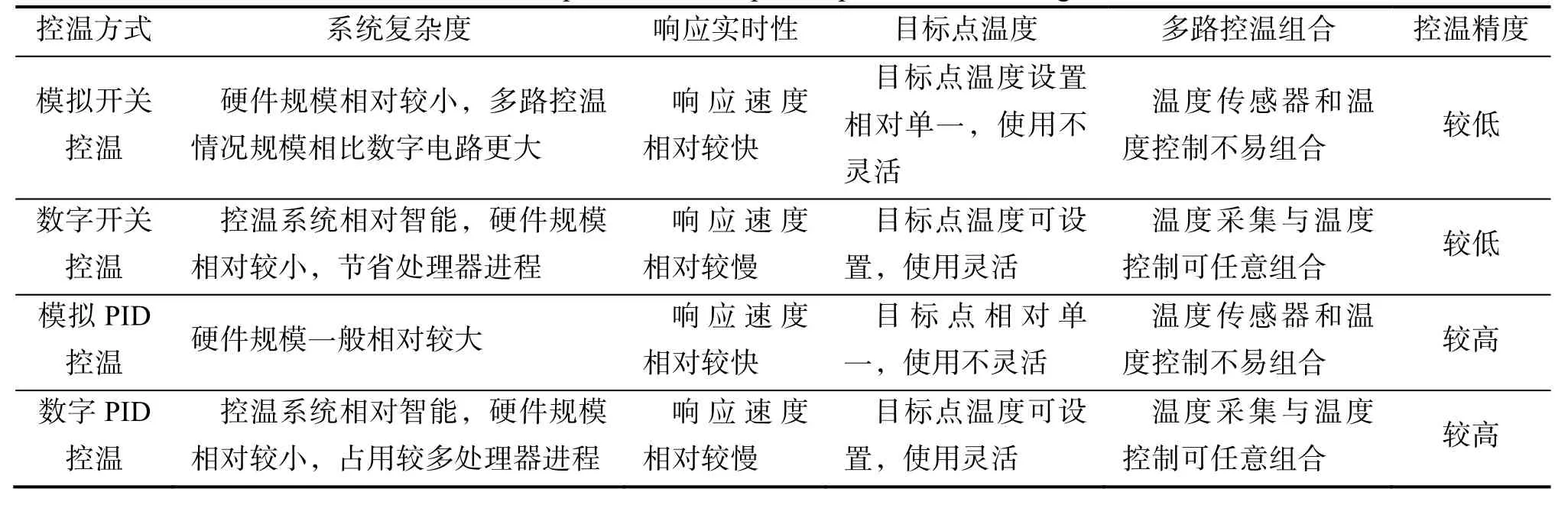
表3 不同控温方式对比表Tab.3 Comparison of multiple temperature controlling modes
管理控制设备采用的控温模型如图9所示。在当前温度与目标温度值相差大于阈值时,启用开关控制,即全功率加热或制冷,节省处理器资源,当目标温度与当前值的差值在阈值以内时,采用PID算法进行控温,保证控温精度。
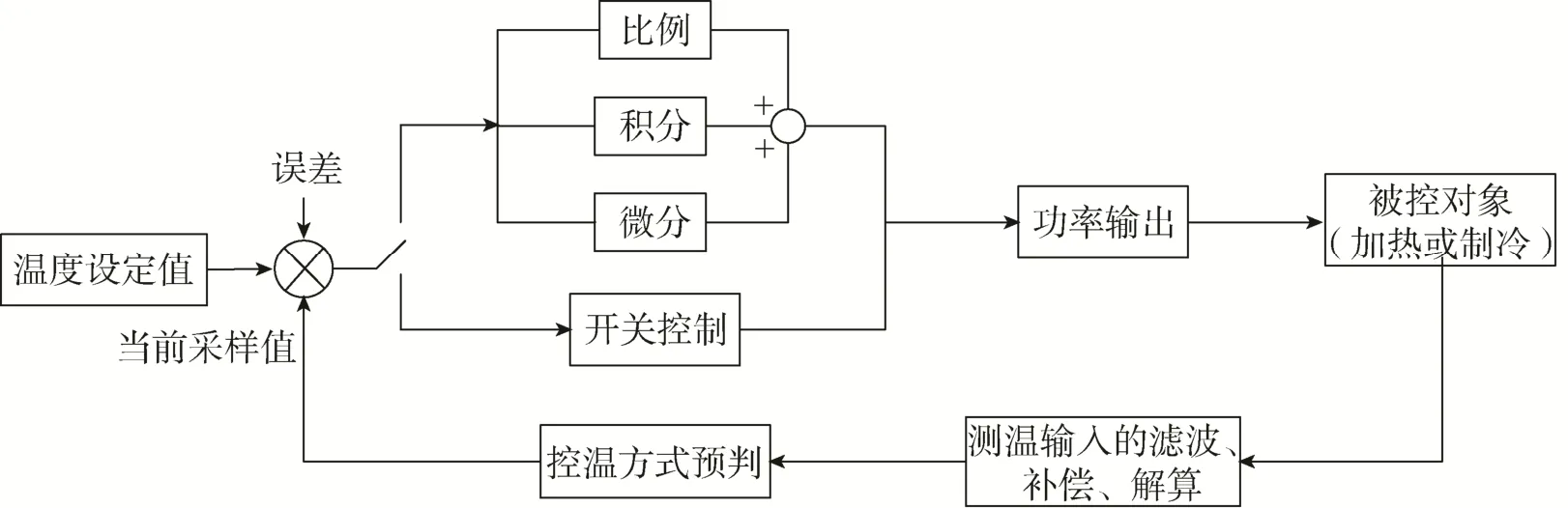
图9 控温模型Fig.9 The model of temperature controlling
数字PID控温的温度、控温精度和控温稳定度见表4所示,从表中可以看出控温精度和稳定度均控制在小于0.1K的温度范围内。
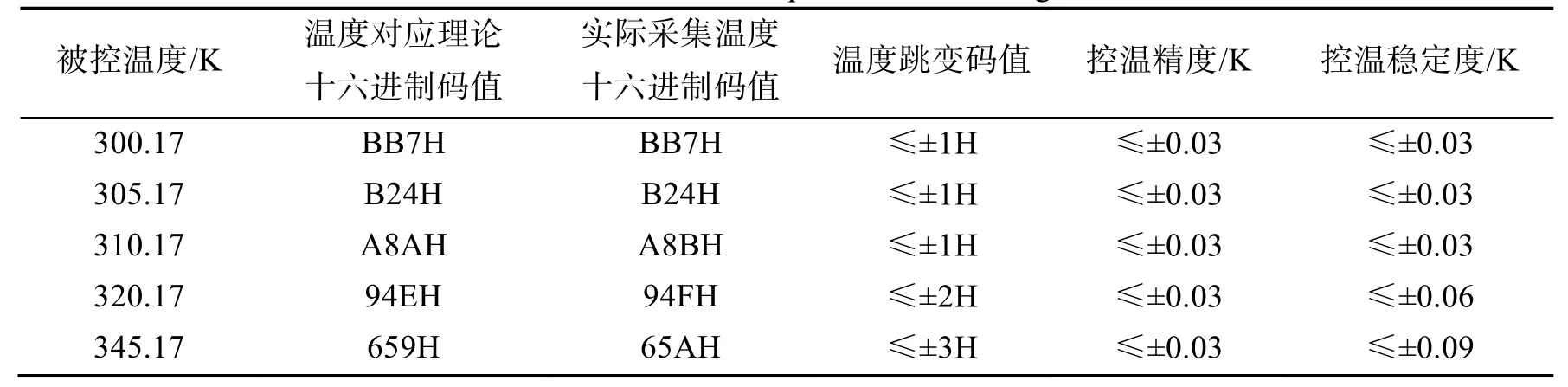
表4 温度控制数据Tab.4 Data of temperature controlling
5 结束语
“高分四号”卫星遥感相机管理控制设备依托自身有序的资源调配和管理能力,保证相机与卫星平台之间的指令和数据交换,同时也保证相机各部件的正常有序运转和可靠工作,依靠复杂相机系统控制技术辅助相机迅速将连续图像呈现给用户。相机管理控制设备的成功研制和在轨稳定运行,开创了国内同类产品在静止轨道应用的先河,产品在系统可靠性框架、自主控制、软件容错等技术方面可为后续型号产品的研制提供借鉴。
References)
[1]赵振明, 王兵, 高娟. 地球静止轨道凝视型相机热分析与热设计[J]. 航天返回与遥感, 2010, 31(3): 34-40. ZHAO Zhenming, WANG Bing, GAO Juan. Preliminary Research on the Thermal Design Methods of the Geosynchronous Orbit Staring Camera[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(3): 34-40. (in Chinese)
[2]陶家生, 孙治国, 孙英华, 等. 静止轨道高分辨率光学遥感探索[J]. 光电工程, 2012, 39(6): 1-6. TAO Jiasheng, SUN Zhiguo, SUN Yinghua, et al. Exploration of High Resolution Optical Remote Sensing of the Geostationary Orbit[J]. Opto-electronic Engineering, 2012, 39(6): 1-6. (in Chinese)
[3]陶小平, 罗霄, 薛栋. 地球静止轨道面阵凝视成像系统分时积分抑振技术[J]. 光学精密工程, 2013, 21(8): 2169-2179. TAO Xiaoping, LUO Xiao, XUE Dong. Time-integral Suppression Technology Based on Staring Imaging System of Planar Array in Geostationary Orbit[J]. Optics and Precision Engineering, 2013, 21(8): 2169-2179. (in Chinese)
[4]戴立群. Interline CCD在地球静止轨道空间光学遥感器上的应用研究[C]//第二十三届全国空间探测学术交流会, 厦门, 2010. DAI Liqun. The Interline CCD Research of Space Optical Remote Sensor in Geostationary Orbit[C]//The Twenty-third National National Colloquium on Space Exploration, Xiamen, 2010. (in Chinese)
[5]王少游. 地球静止轨道区域凝视光学系统成像性能分析[D]. 哈尔滨: 哈尔滨工业大学, 2009. WANG Shaoyou. The Analyse of Imaging Quality of the Optical System in Geostationary Orbit[D]. Harbin: Harbin Institute of Technology, 2009. (in Chinese)
[6]唐士建, 石志成, 何海燕. 微小型空间探测相机管理控制单元设计及应用[C]//第二十五届全国空间探测学术讨论会论文集, 内蒙古, 2012. TANG Shijian, SHI Zhicheng, HE Haiyan. The Design and Application of the Management and Control System of Small Camera on Space Exploration[C]//The Twenty-fifth National Colloquium on Space Exploration, Inner Mongolia, 2012. (in Chinese)
[7]BHAT R. New Radiation Dose Model for Geostationary Orbit[J]. Journal of Spacecraft and Rockets, 2009, 46(3): 712-715.
[8]杨世宇, 曹洲, 薛玉雄. 空间单粒子锁定及防护技术研究[J]. 核电子学与探测技术, 2008, 28(5): 945-948. YANG Shiyu, CAO Zhou, XUE Yuxiong. The Research of the Space Single Event Latchup and Protection Techniques[J]. Nuclear Electronics & Detection Technology, 2008, 28(5): 945-948. (in Chinese)
[9]丁义刚. 空间辐射环境单粒子效应研究[J]. 航天器环境工程, 2007, 24(5): 283-290. DING Yigang. The Research of Single Event Effects in Space Radiation Environment[J]. Spacecraft Environment Engineering, 2007, 24(5): 283-290. (in Chinese)
[10]JOHNSON G H, SCHRIMPF R D, GALLOWAY K F, et al. Temperamre Dependence of Single-event Burnout in N-channel MOSFETs[J]. Nuclear Science IEEE Transactions on, 1992, 39(6): 1605-1612.
[11]张越. 槽栅功率MOSFET单粒子效应模拟研究[D]. 哈尔滨: 哈尔滨工业大学, 2013. ZHANG Yue. The Simulation Research of Single-event Effect in Power MOSFETs [D]. Harbin: Harbin Institute of Technology, 2013. (in Chinese)
[12]赵艳华. 中波红外面阵遥感相机相对辐射定标方法研究[J]. 航天返回与遥感, 2010, 31(3): 48-54. ZHAO Yanhua. Study on the Relative Radiometric Calibration Method of Mid-wave Infrared Area-array Remote Sensing Camera[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(3): 48-54. (in Chinese)
[13]龙亮, 王世涛, 周峰, 等. 空间红外点目标遥感探测系统在轨辐射定标[J]. 航天返回与遥感, 2012, 33(2): 73-80. LONG Liang, WANG Shitao, ZHOU Feng, et al. In-orbit Radiometric Calibration Methods for Remote Sensing System to Detect Space Infrared Point Target[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(2): 73-80. (in Chinese)
[14]孙振, 冉鑫, 应士君. 阵列相机多光谱图像采集技术[J]. 计算机与现代化, 2012, (4): 175-191. SUN Zhen, RAN Xin, YING Shijun. Multi-spectral Image Acquisition Technology Based on Camera Array [J]. Computor andModernization, 2012, (4): 175-191. (in Chinese)
[15]季兵飞, 麻忠文. AD22105低压温控开关[J]. 中国科技纵横, 2012, (18): 41-43. JI Bingfei, MA Zongwen. AD22105 Low Voltage Thermostat Switch[J]. China Science & Technology Overview, 2012, (18): 41-43. (in Chinese)
[16]王海宁. 基于单片机的温度控制系统的研究[D]. 合肥: 合肥工业大学, 2008. WANG Haining. Design of Temperature Control System Based on Microcontroller[D]. Hefei: Hefei University of Technology, 2008. (in Chinese)
[17]付秀敏. 航天器自主控温系统设计[D]. 西安: 西安电子科技大学, 2011. FU Xiumin. Independent Temperature Control of Spacecraft Systems [D]. Xi’an: Xidian University, 2011. (in Chinese)
[18]姚根和, 吴华红, 李晓凡. 卫星高精度智能控温技术研究[C]//第五届海内外华人航天科技研讨会, 西安, 2004: 59-69. YAO Genhe, Wu Huahong, LI Xiaofan. The High-Precision and Intelligent Temperature Control of Satellite[C]//The Fifth Aerospace Science and Technology Seminar of Chinese at Home and Abroad, Xi’an, 2004: 59-69. (in Chinese)
[19]史翠红, 李恺, 王芸. 空间相机温度解算方法的分析与研究[J]. 航天返回与遥感, 2011, 32(1): 59-66. SHI Cuihong, LI Kai, WANG Yun. Analysis and Research on Temperature Calculating Methods for Space Camera[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(1): 59-66. (in Chinese)
[20]常霞, 张鹏, 李恺, 等. 一种轻小型遥感相机高精度主动热控设计[J]. 计算机测量与控制, 2014, 22(7): 2274-2276. CHANG Xia, ZHANG Peng, LI Kai, et al. Design of High Precision Control of Space Camera Temperature Controlling[J]. Computer Measurement & Control, 2014, 22(7): 2274-2276. (in Chinese)
System Control Technology of High Resolution Camera In Geostationary Orbit
TANG Shijian ZHANG Donghao CHAI Fengping
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
GF-4 satellite was successfully launched at the end of 2015. Its high-resolution camera as the main satellite payload can solve the observation problem that the camera in low orbit cannot observe mutations, continuous natural disasters or adverse weather. To achieve fast, continuous, reliable and stable observation in about 36,000km geostationary orbit, in addition to high-resolution detectors and video processing circuit, it is necessary to rely on orderly deployment of camera internal resources and intelligent imaging control achieved by management and control equipment. This paper describes the system architecture of management and control equipment specialited for GF-4 high-resolution camera of geostationary orbit, recommends a new, long-life and multiple redundant mechanism control architecture in geostationary orbit, and details the autonomous control of the infrared radiation calibration and the autonomous variable speed control of the spectral filter mechanism based on this mechanism control framework. It also describes a variety of new camera system control technology, such as visible multi-mode imaging control, auto infrared imaging mode, infrared imaging control with safeguard and digital PID temperature control. The results of the paper provide references for developing the future products in the aspects of system reliability framework, independent process control, and software fault tolerance.
autonomous control; high-resolution camera; geostationary orbit; GF-4 satellite
V447
: A
: 1009-8518(2016)05-0058-11
10.3969/j.issn.1009-8518.2016.05.007
唐士建,男,1982年生,毕业于北京理工大学控制科学与工程专业,硕士,高级工程师。主要研究方向为航天遥感器电子工程及控制技术。E-mail: 741124372@qq.com。
(编辑:庞冰)
2016-03-30
国家重大科技专项工程
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
环球时报(2022-05-23)2022-05-23
今日农业(2021年19期)2022-01-12
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年10期)2021-07-16
建材发展导向(2021年6期)2021-06-09
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
雷达学报(2018年3期)2018-07-18