光纤陀螺标度因数与零偏测试及评价方法研究
2016-02-07 02:50周树道王晓蕾
中国测试 2016年12期
张 龙,叶 松,周树道,王晓蕾,刘 凤
(解放军理工大学气象海洋学院,江苏 南京 211101)
光纤陀螺标度因数与零偏测试及评价方法研究
张 龙,叶 松,周树道,王晓蕾,刘 凤
(解放军理工大学气象海洋学院,江苏 南京 211101)
为对舰船航姿测量系统应用背景下不同型号干涉型光纤陀螺(IFOG)的性能优劣做出准确评价,在[-35°/s,35°/s]角速度范围和100Hz数据采样频率下,对两种型号的IFOG进行标度因数和零偏测试,并对其参数测试和性能评价方法进行研究。结果表明:在[-35°/s,35°/s]角速度范围内,B-215型IFOG的标度因数非线性度(剔除±20°/s奇异角速度点)优于KVH-13型,且两种IFOG在该范围内的标度因数非线性度均大于其在全量程范围内的标度因数非线性度;在100Hz采样频率下,KVH-13型IFOG的零偏稳定性优于B-215型,且B-215型IFOG在该频率下的零偏稳定性优于其在2000Hz下的零偏稳定性。该测试方法可得出在特定测量范围和采样频率下IFOG的性能参数,有助于提高不同型号IFOG产品的可比性,为实际应用中IFOG的选型提供依据。
干涉型光纤陀螺;标度因数;标度因数非线性度;零偏;零偏稳定性;可比性
0 引 言
光纤陀螺(fiber optic gyroscope,FOG)是一种基于Sagnac效应的角速度传感器,其概念最早于1976年由美国犹他大学的V.Vali和R.W.Shorthill提出[1]。到目前为止,光纤陀螺凭借转速分辨率高、零点稳定性好、可靠性高、预热时间短等优势广泛应用于舰船航姿测量系统中[2-4]。
在描述光纤陀螺特性的众多参数中,标度因数和零偏是影响光纤陀螺测量精度的重要指标。标度因数受光源功率、光纤损耗等因素的影响,大且稳定的标度因数是光纤陀螺提高精度的必要条件[5]。零偏不仅受地球自转、温度等多种因素的影响,还受到Shupe效应、Faraday效应和Kerr效应等[6-7]造成的附加相位误差的影响。差的零偏稳定性会增大光纤陀螺在输入角速率较小时的测量误差。
为了进一步提高测量精度,国内外已对光纤陀螺的标度因数和零偏特性进行了深入的研究。A.M. Kurbatov[8]提出通过提高转台转动信号的幅值稳定性和偏置调制深度的方法改善光纤陀螺的标度因数和零偏特性;该方法原理复杂,对实验设备要求较高,在工程应用中尚未得到推广。孙亮等[9]采用多项式回归分析的方法建立了与角速率相关的标度因数非线性和零偏稳定性综合补偿模型;该模型是基于光纤陀螺在全量程内的特性得出的,虽简单易行,但补偿精度尚有待提高。那永林等[10]重点对小速率下标度因数的测试误差和影响因素进行了研究,通过对各输入角速度进行整圈采样的方法减小了标度因数的测试误差,而对其他角速度范围内光纤陀螺的参数测试和性能评价方法未做具体分析。
作为惯性导航系统的核心器件,光纤陀螺被广泛应用于不同的场合。尽管产品化的FOG均提供相应的技术指标,但大多数参数是在全量程和固有采样频率下测得的。由此获得的测试结果不足以作为评价FOG产品性能优劣的指标。为进一步提高FOG产品性能参数的可比性,本文提出FOG产品的性能测试和比较应根据实际应用需求选择合适的动态测试角速度范围和数据采样频率,并以舰船航姿测量系统为例,选取[-35°/s,35°/s]角速度范围和100 Hz数据采样频率下,对两种干涉型光纤陀螺(interferometric fiber optic gyroscope,IFOG)进行标度因数和零偏测试。着重对标度因数非线性度和零偏稳定性的测试方法和结果的可比性进行了讨论,以期为实际应用中IFOG的选型提供依据。
1 测试方法
1.1 标度因数测试
标度因数是指光纤陀螺输出量与输入角速率的比值,用其在全量程内输入输出拟合直线的斜率表示。拟合值与实际值之间的偏差又引出了标度因数非线性度、标度因数重复性、标度因数不对称度等参数[11-12]。本文选取B-215型和KVH-13型IFOG进行测试实验,其中B-215型为数字式闭环IFOG,最高采样频率为2 000 Hz;KVH-13型为数字式开环IFOG,最高采样频率为100Hz。
测试目的是获取两种IFOG的标度因数、标度因数非线性度、标度因数不对称度和标度因数重复性参数。测试方法[13]为:将光纤陀螺通过安装夹具固定在三轴模拟台上,调整转台旋转轴和IFOG的输入基准轴,使其平行于地垂线。俯视转台,规定转台以逆时针方向旋转时为正向,反之为负向。在[-35°/s,35°/s]角速度范围内选取如下角速度点:
正向角速度:0°/s,0.5°/s,0.8°/s,1°/s,2°/s,5°/s,8°/s,10°/s,15°/s,18°/s,19°/s,20°/s,21°/s,22°/s,25°/s,28°/s,30°/s,35°/s;
反向角速度:-35°/s,-30°/s,-28°/s,-25°/s,-22°/s,-21°/s,-20°/s,-19°/s,-18°/s,-15°/s,-10°/s,-8°/s,-5°/s,-2°/s,-1°/s,-0.8°/s,-0.5°/s,0°/s。
B-215型每0.5 ms输出一个数据,KVH-13型每10ms输出一个数据。通过测试软件对B-215型IFOG 10ms内的20个输出值进行平滑处理[14]。在每个角速度下,分别记录两种IFOG旋转一周的输出值。测试开始和结束时,分别测试转台静止时IFOG输出量的平均值,并将该值从IFOG在各个角速度下的输出平均值中扣除,得出各输入角速度下IFOG的真实输出值。
建立IFOG输入输出关系的线性模型[12]:

式中:wij——第j个输入角速度;
K——标度因数;
F0——拟合零位;
νj——拟合误差。
对选取的M个输入角速度及其输出值进行最小二乘拟合,IFOG的标度因数K和拟合零位F0可由下式求得:

IFOG在第j个输入角速度时的非线性偏差由下式给出,其中Fm为输入角速度最大时IFOG的输出值:

由下式可计算出IFOG标度因数非线性度Km:

设K(+)为正向输入角速度时IFOG的标度因数,K(-)为负向输入角速度时IFOG的标度因数,为标度因数平均值,则标度因数不对称度Ka为
根据上述测试方法,对两种型号的IFOG分别进行7次标度因数测试,相邻两次测试之间IFOG及其测试设备需关机并恢复至室温。利用下式计算IFOG的标度因数重复性度Kr[12]:

式中:Ki——第i次测试的标度因数;
Q——测试次数。
1.2 零偏测试
零偏是指光纤陀螺在输入角速度为零时输出量平均值的等效输入角速度。零偏稳定性指输入角速度为零时,光纤陀螺的输出量围绕其均值的离散程度,表示为规定时间内输出量的标准偏差对应的等效角速度。零偏重复性是指光纤陀螺在相同测试条件下重复进行Q次测量所得零偏的一致程度,用各次测量所得零偏的标准差表示。
测试的目的是获取两种IFOG的零偏、零偏稳定性和零偏重复性参数。测试方法[12]为:光纤陀螺的安装方式同标度因数测试实验;尽量避免地球自转的影响,记录两种IFOG在输入角速度为零时的输出值,测试时间为6min。KVH-13型以最高采样频率进行数据采样,每10ms输出一个数据。B-215型每0.5 ms输出一个数据,取时间步长10 ms,对该时间段内的20个输出值进行平滑处理。
设IFOG静态输出值的平均值为F¯,标度因数为K,则零偏B0可表示为

进而由下式求得IFOG的零偏稳定性Bs,式中n表示采样次数:

按上述方法重复进行7次零偏测试,相邻两次测试之间IFOG及其测试设备需关机并恢复至室温。

表1 B-215型IFOG标度因数测试结果

表2 KVH-13型IFOG标度因数测试结果
由下式计算光纤陀螺的零偏重复性Br:

式中:Q′——重复测量次数;
B0i——第i次测试的零偏;
2 测试结果
2.1 标度因数测试结果
两只IFOG标度因数测试结果分别如表1和表2所示。对各角速度下的标度因数非线性度进行计算,得如到图1和图2所示的标度因数非线性曲线。
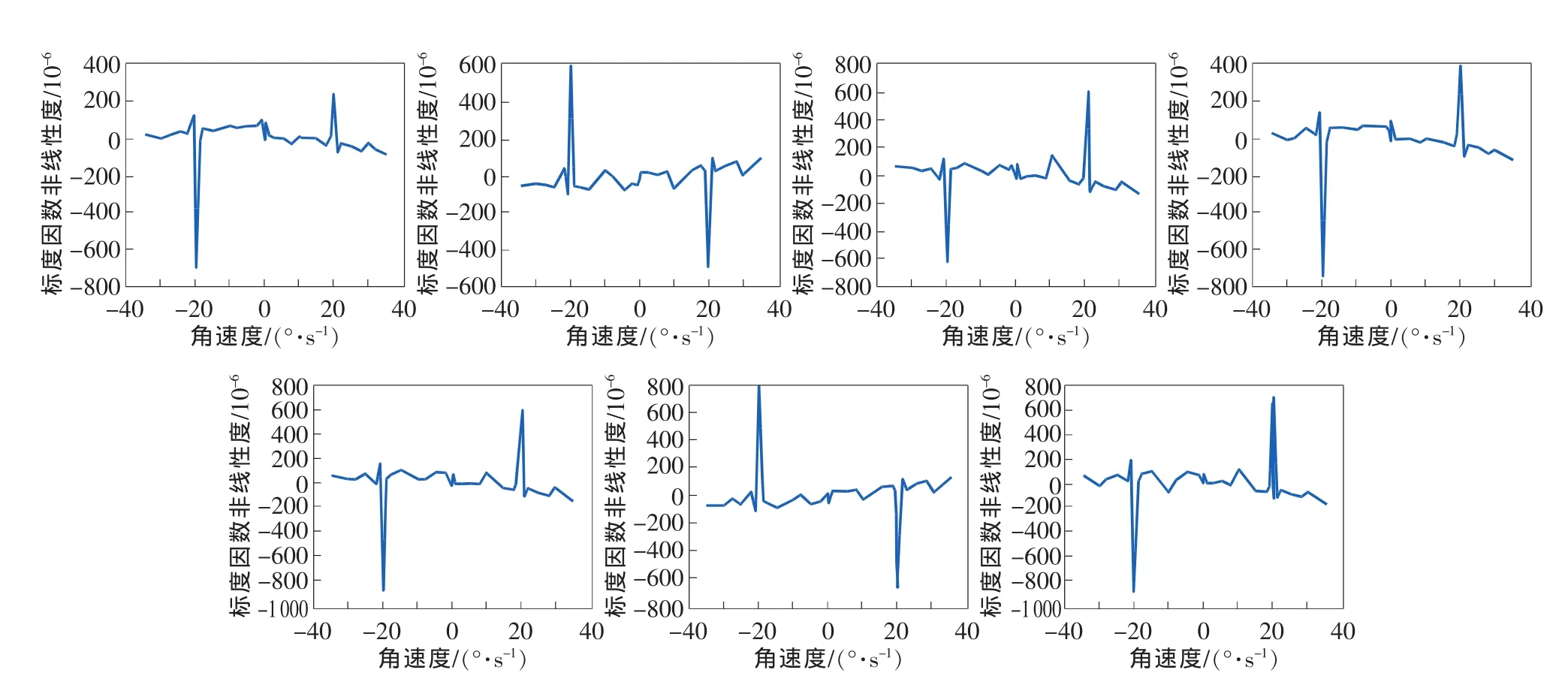
图1 B-215型IFOG标度因数非线性度曲线

图2 KVH-13型IFOG标度因数非线性度曲线
由图1可知,B-215型IFOG的标度因数非线性度总体表现良好,仅在±20°/s时产生大幅跳变,而KVH-13型IFOG在动态测试角速度范围的两个端点处表现出较大的标度因数非线性特性。研究表明,这种现象与两者的工作方式有关:对于闭环工作方式的B-215型IFOG而言,由于制造过程中存在的瑕疵,导致某些工作点上相位跟踪计算出现较大误差,因而产生标度因数非线性度的跳变现象。而KVH-13型IFOG的标度因数非线性曲线基本反映了其开环工作方式的特点,即其输出量与输入角速度的线性关系随着动态范围的增大而变差[15]。
在舰船航姿测量系统中,需要对IFOG在[-35°/s,35°/s]角速度范围内的总体测量特性做出评价,而不应该仅凭±20°/s上的非线性突变就否定了B-215型IFOG的总体测量特性。为更客观地比较两只陀螺的标度因数非线性特性,在去除±20°/s角速度点的前提下,重新对B-215型IFOG的7组标度因数测试结果进行计算,任取其中一组的标度因数非线性曲线如图3所示。7组测试中最大的标度因数非线性度明显小于未扣除±20°/s时最大的标度因数非线性度Knmax(898.7566×10-6)。且该曲线的幅值波动范围较KVH-13型IFOG的标度因数非线性曲线更小、更平稳。要进一步提高B-215型IFOG的测量精度,对产生标度因数跳变的角速度区间做深入研究尤为重要,相关讨论将另文阐述。
2.2 零偏测试结果
两只IFOG的零偏测试结果如表3和表4所示。
由于两只IFOG的最大采样频率不同,为了便于比较,在B-215型IFOG以2000Hz采样的基础上,取时间步长为10ms,进行10ms内20个数据的平滑处理。图4给出B-215型IFOG以2000Hz频率采样时的静态测试输出曲线,图5为以10ms时间步长平滑后的静态输出曲线。图6为KVH-13型IFOG以100Hz频率采样时的静态输出曲线。
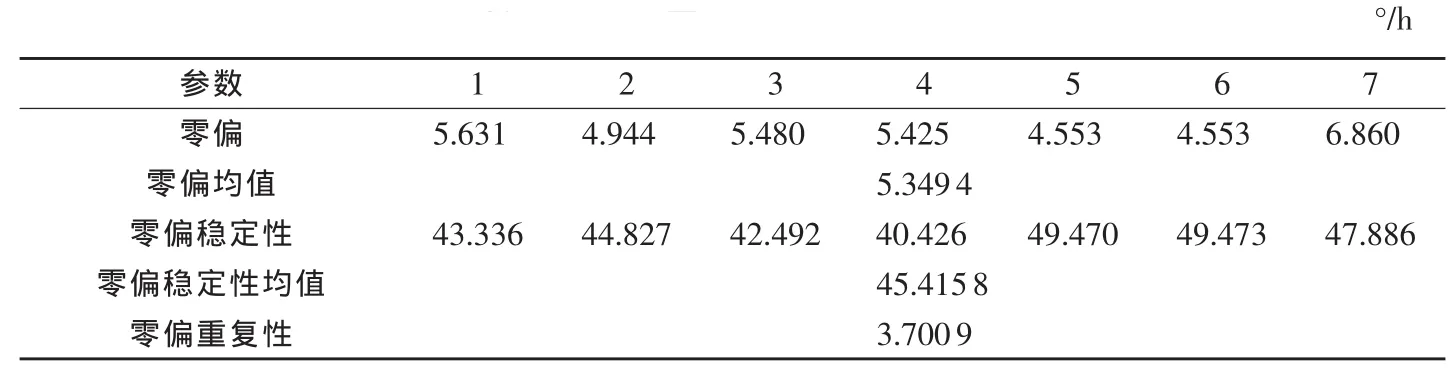
表3 B-215型IFOG零偏测试结果
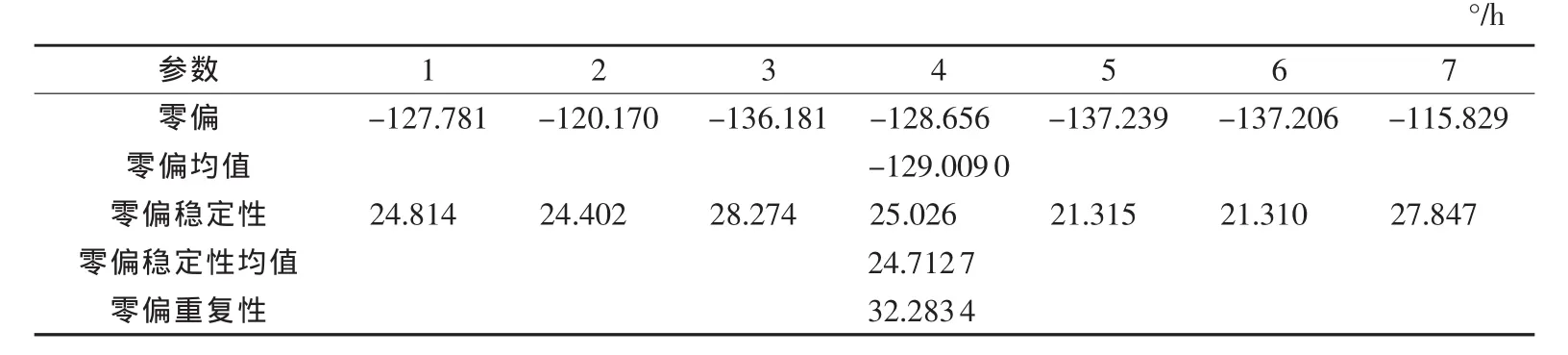
表4 KVH-13型IFOG零偏测试结果
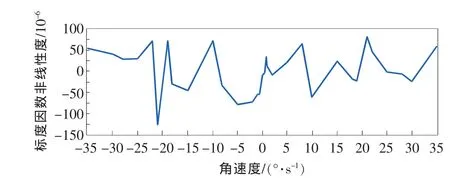
图3 B-215型IFOG去除±20°/s后的标度因数非线性度曲线

图4 B-215型IFOG静态测试输出(2000Hz采样频率)
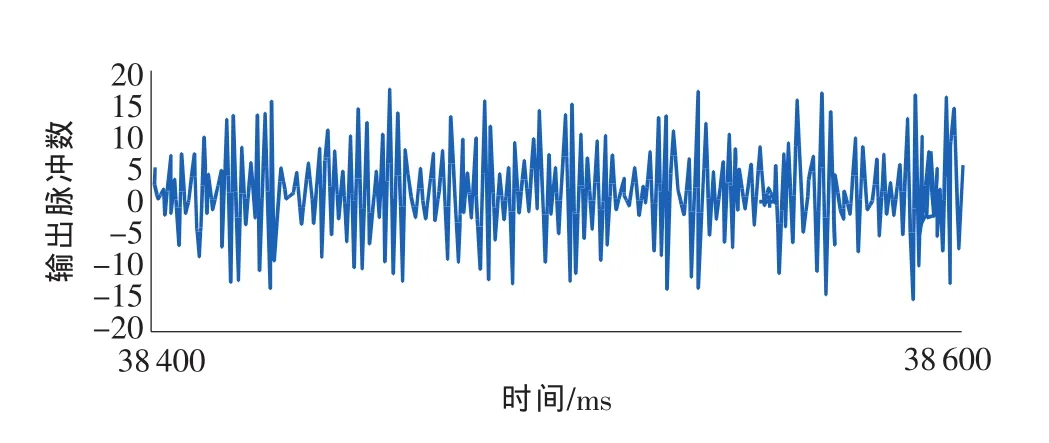
图5 B-215型IFOG静态测试输出(10ms数据平滑)

图6 KVH-13型IFOG静态测试输出(100Hz采样频率)
在舰船航姿测量系统中,光纤陀螺数据更新率的要求一般是100~500Hz。对于B-215型IFOG而言,其2000Hz的采样频率远远超出了实际需求。与此同时,过高的采样频率反而会加大IFOG的零偏幅值和零偏不稳定性。在实际应用中,应结合系统要求的数据更新率,选择合适的时间步长,对IFOG的静态输出进行平滑处理,并根据平滑处理后的结果评价FOG产品的零偏特性。比较图4和图5可知,B-215型IFOG经10 ms步长平滑处理后的静态输出曲线的幅值明显小于未经平滑的曲线。
为了解IFOG在长时间内的零偏特性,实验中对两只IFOG进行了长达27 h的静态测试(二者均以最高频率采样,对B-215型IFOG的输出数据进行10ms数据平滑处理),测试结果如图7所示。由图可知,KVH-13型IFOG在输出曲线的初始阶段出现上升趋势。经分析,该现象主要是因陀螺开机后其内部快速升温导致的,所以在实际应用中应对其进行温度补偿[16]。而B-215型IFOG在整个测试过程中零偏的幅值波动较大,其零偏稳定性较KVH-13型更差。
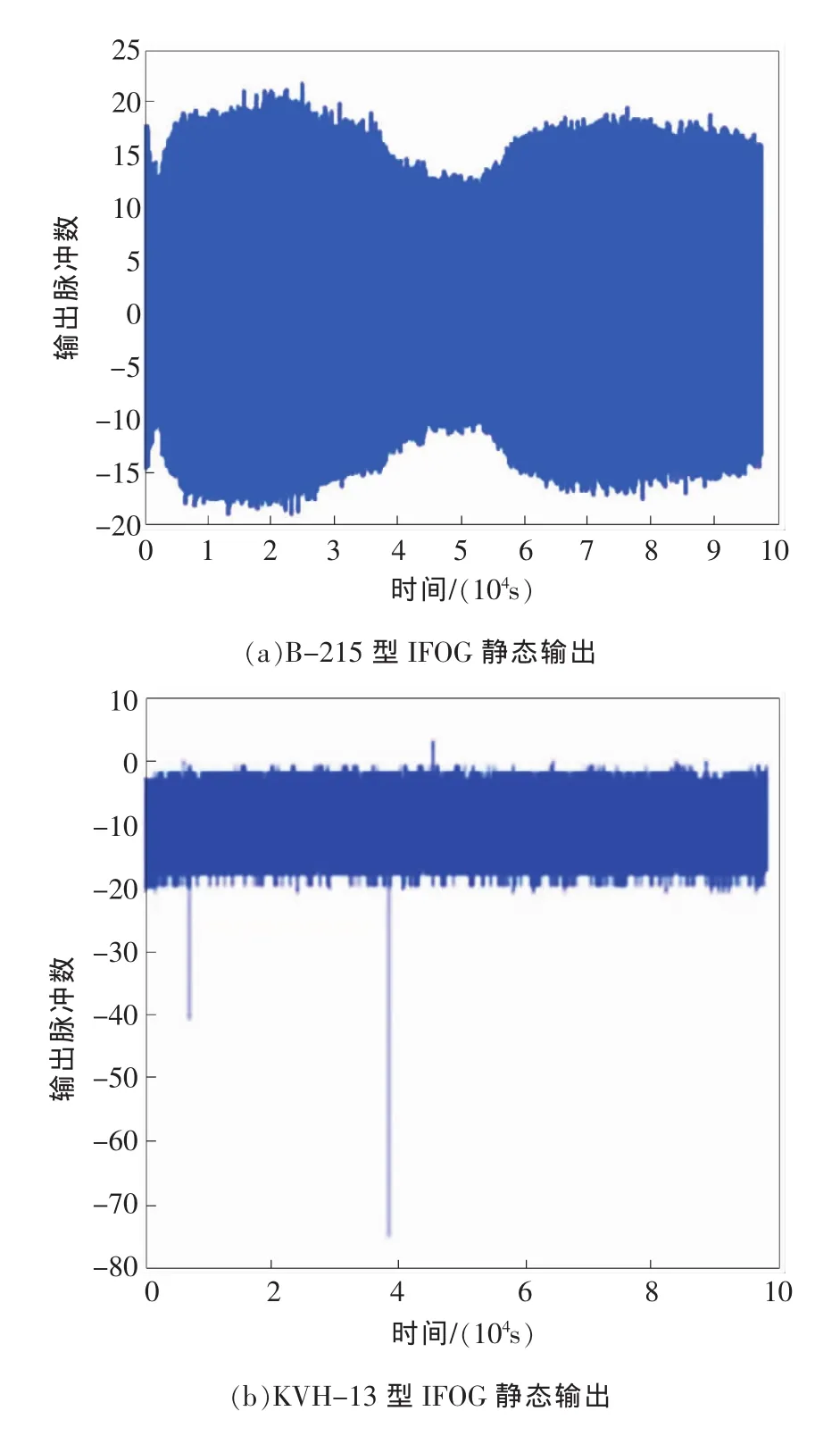
图7 两种IFOG 27h静态测试输出
2.3 性能比较
在测试过程中,两只IFOG均以各自的最高采样频率进行采样,B-215型IFOG的输出数据进行10 ms平滑处理。在[-35°/s,35°/s]的动态测试范围内,两只IFOG的基本性能指标如表5所示。由表可知,B-215型IFOG在标度因数重复性、零偏和零偏重复性方面明显优于KVH-13型;若剔除B-215型在-20°/s和20°/s两测试点的测试数据,则其标度因数非线性也明显优于KVH-13型IFOG;在标度因数不对称度和零偏稳定性方面B-215型IFOG比KVH-13型IFOG略差。

表5 B-215、KVH-13型IFOG的基本性能比较1)
3 IFOG的可比性讨论
作为惯性导航系统中必不可少的器件,光纤陀螺已经广泛应用于各种不同的场合。尽管产品化的IFOG均具有明确的技术指标,但是部分参数仅仅反映了IFOG在全量程上的测量特性。实际应用中,对于不同的精度要求和测量范围,传统的测试方法和评价原则难以对IFOG产品的性能优劣做出客观评价。
本文以IFOG在舰船航姿测量系统中的应用为背景,对IFOG的测试和评价方法进行了分析。研究表明,IFOG的零偏稳定性与静态测试输出数据的采样频率有关,当选用IFOG最大采样频率获得的输出值进行计算时,所得零偏稳定性明显偏大,以此为依据对IFOG的零偏稳定性做出评价是不合理的。为得到特定应用场合下IFOG零偏稳定性的真实情况,需根据系统的数据更新频率要求,选择合适的时间步长,并对该时间段内IFOG的输出值进行平滑处理,以此作为求解IFOG零偏稳定性的数据来源。在舰船航姿测量系统中,所要求的数据更新频率为100~500Hz。在满足该要求的前提下,选择时间步长为10ms,对B-215型IFOG的静态输出数据进行平滑处理,由此获得的两种IFOG的零偏稳定性具有较高的可比性。
由式(8)可知,IFOG的标度因数非线性度与动态测试时最大输入角速度对应的输出值密切相关。选取较大的动态测试角速度范围很可能会获得更小的标度因数非线性度。对于不同型号的IFOG产品,其量程存在较大差异,闭环工作方式的IFOG量程范围往往大于开环IFOG。若在陀螺仪的全量程内对IFOG进行标度因数非线性度的测试,则测试结果的可比性将显著降低。在舰船航姿测量系统中,因更加关注在[-35°/s,35°/s]角速度范围内IFOG的性能,故在标度因数测试前明确规定其动态测试的角速度范围十分必要,相应的测试结果才会具有更高的参考价值。
4 结束语
为了对舰船航姿测量系统应用背景下不同型号IFOG的性能优劣做出准确评价,本文对两种不同型号的IFOG进行了标度因数和零偏测试,并对测试结果的可比性进行了讨论。参照GJB 2426A——2004《光纤陀螺仪测试方法》[13],选取[-35°/s,35°/s]角速度范围和100Hz数据采样频率进行测试,结果如下:在[-35°/s,35°/s]角速度范围内,B-215型IFOG的标度因数非线性度(剔除±20°/s奇异角速度点)优于KVH-13型,且两种IFOG的标度因数非线性度均大于其在全量程范围内的标度因数非线性度;在100Hz采样频率下,KVH-13型IFOG的零偏稳定性优于B-215型,且B-215型IFOG在该频率下的零偏稳定性优于2000Hz下的零偏稳定性。
在测试过程中,发现B-215型IFOG在某些角速度点上会产生标度因数的急剧跳变现象。针对该问题,将设计更为合理的实验方案进行深入研究。本文所阐述的测试方法可得出在特定测量范围和采样频率下IFOG的性能参数,有助于提高不同型号IFOG产品的可比性,为实际应用中IFOG的选型提供了依据,具有一定的实用价值。
[1]VALI V,SHORTHILL R W.Fiber ring interferometer [J].Applied Optics,1976,15(5):1099-1100.
[2]NAYAK J.Fiber-optic gyroscopes:From design to production[Invited][J].Applied Optics,2011,50(25):152-161.
[3]周本清,宋军,唐永宁,等.基于主从惯导技术的航姿系统研究[J].压电与声光,2015,37(3):507-511.
[4]徐锐.船用光纤陀螺捷联惯导系统初始对准技术研究[D].哈尔滨:哈尔滨工业大学,2013.
[5]PAVLATH G A.Fiber optic gyros past,present,and future[C]∥OFS2012 22nd International Conference on Optical Fiber Sensor.International Society forOptics and Photonics,2012:1-10.
[6]SONG N,SUN Z,SONG J,et al.Analysis of Shupe effect in polarization-maintaining photonic crystal fiberoptic gyroscope[J].Optical Review,2014,21(3):276-279.
[7]WANG X,WANG X,WANG Y,et al.A novel Faraday effect based semi-physical simulation method for bandwidth of fiber-optic gyroscope[J].Optik-International Journal for Light and Electron Optics,2014,125(3):1358-1360.
[8]KURBATOV A M.New methods to improve the performance of open and closed loop fiber-optic gyros[J]. Gyroscope&Navigation,2015,6(3):207-217.
[9]孙亮,余震虹,陈浩,等.闭环光纤陀螺零偏与标度因数的综合补偿[J].仪表技术与传感器,2014(6):1-3.
[10]那永林,李丽坤,吴衍记,等.光纤陀螺标度因数的测试误差分析[J].中国惯性技术学报,2012,20(4):472-477.
[11]程斯啸,崔剑,王亮.光纤陀螺标度因数与零偏的测试及分析[J].现代导航,2015(1):5-8.
[12]湛尧周,王夏霄,高洋洋,等.地磁场对高精度光纤陀螺零偏的影响机理研究[J].电子测量技术,2016,39(1):147-150.
[13]光纤陀螺仪测试方法:GJB 2426A—2004[S].北京:国防工业出版社,2004.
[14]吕品,刘建业,赖际舟.光纤陀螺的随机误差性能评价方法研究[J].仪器仪表学报,2014,35(2):412-418.
[15]阳明晔,宋章启,张学亮,等.开环光纤陀螺标度因数性能改进[J].中国惯性技术学报,2013,21(6):808-812.
[16]CHEN X,SHEN C.Study on temperature error processing technique for fiber optic gyroscope[J].Optik-InternationalJournalforLightand Electron Optics,2013,124(9):784-792.
(编辑:莫婕)
Study on the methods for test and evaluation of FOG’s scale factor and bias
ZHANG Long,YE Song,ZHOU Shudao,WANG Xiaolei,LIU Feng
(College of Meteorology and Oceanography,PLA University of Science and Technology,Nanjing 211101,China)
In order to have an accurate evaluation on the performance of different types of interferometric fiber optic gyro(IFOG)used for the attitude and heading reference system(AHRS),the scale factor and bias test were implemented for two types of IFOG within the angular velocity range of [-35°/s,35°/s]and data sampling frequency of 100 Hz,and the methods for parameter test and performance evaluation were also researched.The results showed that the scale factor nonlinearity of B-215 type IFOG which eliminated the singularities at±20%was superior to KVH-13 type IFOG within the angular velocity range of [-35°/s,35°/s],and the scale factor nonlinearity of the two kinds of IFOG within the range was greater than that within the whole measuring range.However,the bias stability of KVH-13 type IFOG was superior to that of B-215 type IFOG under the sampling frequency of 100Hz and the bias stability of B-215 type IFOG under the frequency was superior to its bias stability under the sampling frequency of 2 000 Hz.In conclusion,the test method can be used to obtain the performance parameters of IFOG under the specific measuring range and sampling frequency and it is conducive to improve the comparability of different types of IFOG products,which provide basis for model section of IFOG in practical application.
interferometric fiber optic gyro;scale factor;scale factor nonlinearity;bias;bias stability;comparability
A
:1674-5124(2016)12-0001-07
10.11857/j.issn.1674-5124.2016.12.001
2016-04-10;
:2016-06-05
国家自然科学基金(40976062,41406107);江苏省自然科学基金(BK2009062)
张 龙(1992-),男,山东潍坊市人,硕士研究生,专业方向为测试计量技术及仪器。
叶 松(1970-),男,江苏南京市人,副教授,博士,研究方向为海洋仪器及测试技术。
猜你喜欢
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
四川大学学报(自然科学版)(2020年3期)2020-06-03
中国建材科技(2020年6期)2020-03-23
计算机应用与软件(2018年12期)2018-12-13
小学生学习指导(高年级)(2018年3期)2018-11-29
小学生学习指导(中年级)(2018年9期)2018-11-29
科技经济市场(2017年5期)2017-09-16
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06