
基于蓝牙控制的智能小车设计
2016-02-06 00:31郑海城杨冬涛陈学跃陆炯鑫
电脑与电信 2016年5期
郑海城 杨冬涛* 刘 燕 陈学跃 陆炯鑫
(嘉应学院电子信息工程学院,广东 梅州 514015)
基于蓝牙控制的智能小车设计
郑海城 杨冬涛* 刘 燕 陈学跃 陆炯鑫
(嘉应学院电子信息工程学院,广东 梅州 514015)
本文研究蓝牙遥控的多功能智能小车,采用无线蓝牙技术对各种智能模块进行控制,用户可以通过手机客户端直接对小车进行实时操控。本系统由C51单片机为主控芯片,L298N为电机驱动芯片、HC-06蓝牙无线模块、1602液晶显示模块、超声波模块等电路组成。基于手机平台,借助于蓝牙技术,最终实现为一个完整的多功能智能小车系统,实现了智能小车的蓝牙无线遥控、自动壁障等功能。
蓝牙控制;APP无线操控;智能小车
1 引言
随着物联网的兴起,Android手机以其独有的开放性优势正在为人们提供更多优质便捷的技术成果。本文研究的是基于蓝牙控制的智能小车设计,借助于手机平台和蓝牙技术,设计和实现了一种无线智能小车。
本设计是以51单片机为核心,以手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端,双方通过串口进行通信,单片机驱动直流电机控制小车行动,完成了通过手机上的蓝牙功能来控制小车行走的软、硬件设计。通过设置手机界面来设置前进、后退、左转、右转和自动避障等功能,完成小车的前进、后退、左转、右转和自动避障等基本运动功能。实验结果表明,小车可以接收手机遥控信号并灵活地进行前行、倒退、左转、右转和停止等功能。也为其他小车设计提出了一种新的思路,并且让智能家居的生活成为现实更加进了一大步。
2 系统结构框图
设计以手机控制平台、蓝牙通讯模块、电机驱动模块、液晶显示模块和超声波模块等硬件模块组成的智能小车,总的系统框图如图1所示。单片机控制电机驱动来控制电机的正反转以实现小车的前进、后退、左转、右转。HC-06为蓝牙接收模块,通过与手机端的蓝牙进行连接配对,从而接收从手机端发送过来的动作指令。接收到的指令再传给单片机,单片机通过分析传递过来的指令不同,而跳转到不同的子程序来控制电机驱动,从而实现小车的前进、后退、左转、右转等不同的动作之后再让小车显示距离,自动避障和转向。小车采用4wd驱动,以提高整车运动的平稳性。电源提供给单片机5V直流电,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的。
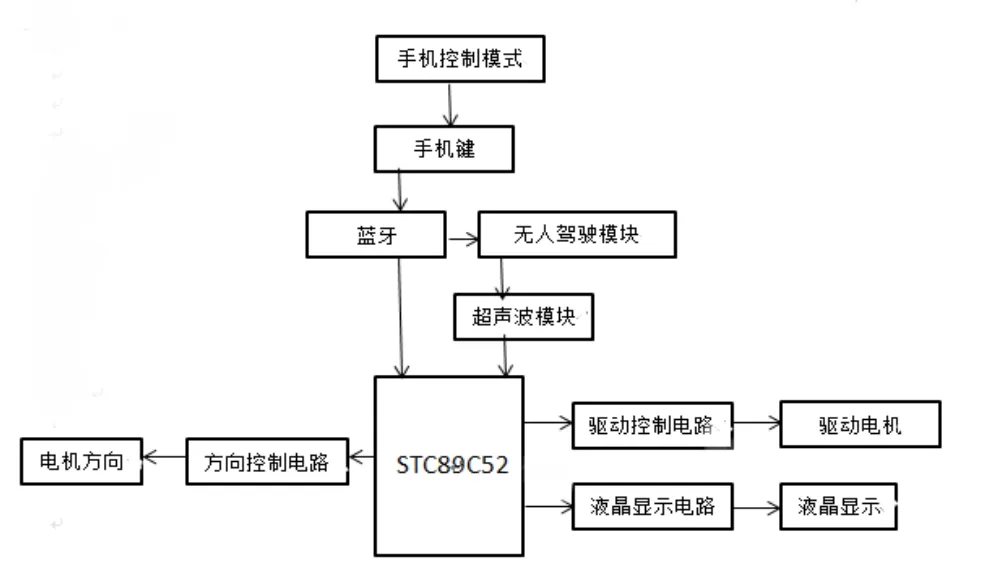
图1 小车系统结构框图
3 硬件电路设计
硬件电路设计包括:主控模块的选择及其最小系统、LCD1602液晶显示模块、电机驱动电路模块、超声波电路、蓝牙模块电路等主要电路设计和与蓝牙APP的结合使用。如图2所示。
3.1 主控模块的选择
系统采用STC89C52RC单片机作为系统的主控制芯片,完成收发蓝牙信号、小车方向的控制、液晶显示等相关功能。STC89C52RC系列单片机具有8k字节Flash,512字节RAM,32位I/O口线,看门狗定时器,内置4KBEEPROM,MAX810复位电路,3个16位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51的5向量2级中断结构),全双工串行口。另外STC89C52可降至0Hz静态逻辑操作,支持2种软件可选择节电模式。空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。最高运作频率35MHz,6T/12T可选。
单片机最小系统如图2所示,包括了单片机、复位电路、时钟电路。单片机可以通过手动按键复位,按下复位键S1后使单片机进入上电的初始状态。系统时钟电路选用了11.0596MHz的晶振,一个机器周期的时间约为1μs。

图2 系统主控硬件电路图
3.2 LCD1602显示模块与主控芯片的设计
系统选用LCD1602液晶显示器,方便直观显示更多的参数,显示器显示波形类型、幅度、频率。单片机P0口作为数据端口,液晶显示接单片机的P0.0-P0.7端口,其中EN是下降沿触发的片选信号,R/W是读写信号,RS是寄存器选择信号。
3.3 电机驱动电路模块设计
电机驱动电路模块内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
3.4 超声波电路模块设计
超声波电路一个控制口发一个10US以上的高电平,就可以在接收口等待高电平输出。一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离。如此不断地周期测量,就可以得到移动测量的值。
3.5 蓝牙模块电路设计
蓝牙模块电路通过接收手机发过来的不同的信息向MCU发送不同的信息内容,使小车进行不同的动作。
4 智能小车手机蓝牙串口软件
本设计所采用的蓝牙app软件是由微软官方网站发布的SPP蓝牙串口作为通信工具。它可以连接任何支持串行端口模式的蓝牙设备(如手机)。SPP蓝牙串口软件支持蓝牙SPP的客户端模式;可以设置为ASCII或HEX显示模式;可设置终端或聊天视图;可以连接到蓝牙MCU;可以连接到蓝牙调制解调器(大多数手机支持)。控制界面如图3所示,手机界面分别有前进、后退、左转,右转按钮。操作界面类似于聊天界面,当发送字符或者指令的时候,小车上的蓝牙如果成功收到指令则会返回一个相同的指令或者字符。

图3 智能小车手机蓝牙控制界面图
5 软件编程
系统主要运用Keil和UV4两个程序软件进行程序编译和仿真。软件设计的主要有主控制、串口通信、中断、驱动、定时、显示等6个部分组成。
5.1 主程序流程图
主程序流程图如图4所示。接上电源后,程序开始初始化设置,蓝牙一直在检测是否收到指令,如果接收到了指令,则会根据接收的指令进行前进、后退、左转、右转和切换到无人操作模式等动作,否则会一直在循环检测。当进入了无人操作模式后,蓝牙模块停止工作,小车则会利用超声波模块进行自动避障和开始在液晶上显示距离。当显示距离大于设定的距离时,小车会后退左转,否则小车则会继续前进,直到遇到了黑线后,跳出程序,实现停车。
5.2 蓝牙流程图
蓝牙子程序流程图如图5所示。开始时,蓝牙先初始化,然后一直检测是否接收到指令。如果接收到指令则根据指令对前进、后退、左转、右转和切换至无人模式进行选择。
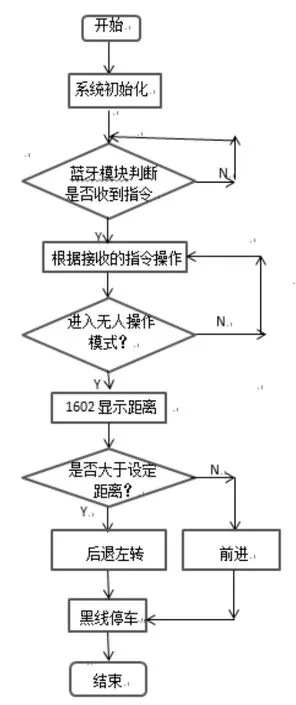
图4 系统程序流程图

图5 蓝牙子程序流程图
6 实验测试及结果分析
小车整体效果图如图6所示,对小车进行如下测试:
(1)在平坦开阔的场地,给小车供上11V左右的电源,当蓝牙接收到前进、后退等指令时均能正常行驶。
(2)在平坦开阔的场地,小车进入自动避障功能时,在小车前方设置障碍物,均能够绕开,碰到黑线可以正常停车。
(3)由于受程序延时问题、外界环境因素和模块本身工艺的影响,超声波模块测得的距离有3cm至6cm的误差,但不影响小车的整体功能。
(4)两个l298n模块由两个电源供电,但是电压不会完全相等,所以小车在行驶过程中左边车轮和右边车轮速度有一点点差异,经试验会产生5至8度的偏移角,小于10度,不影响小车的整体功能。
7 总结
本文阐述一种可通过手机蓝牙遥控或者无人驾驶小车的软、硬件设计。单片机编程控制电机的正反转来实现小车前进、后退、左转、右转,而电机的正反转则由电机驱动L298N输出端的逻辑电平来控制。手机控制时手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端,双方通过串口进行通信;无人驾驶时则根据超声波所测得的距离进行控制。实验结果表明,小车可以接收手机遥控信号并灵活地前行、倒退、左转、右转和切换至无人驾驶的功能,达到了预期的目的,很好地完成了最开始预期的效果,并且为其他智能生活提供了很有价值意义的范例。

图6 小车整体效果图
[1]赵海兰.基于单片机的红外遥控智能小车的设计[J].电子世界,2013(3):45-47.
[2]黄杰,秦补枝.基于模糊控制的智能车辆设计[J].中国科技信息,2010(20):148-149.
[3]姚培,张李坚,周晶香.基于单片机控制的智能循迹避障小车[J].现代制造,2010(12):192-193.
[4]赵振德.多功能遥控智能小车的制作[J].电子制作,2011(4):12-16.
[5]李瀚霖,王嘉楠,边天剑.智能小车研究与设计[J].科技致富向导,2011(18):122-122.
[6]张毅刚,彭喜元,彭宇.单片机原理及应用[M].北京:高等教育出版社,2010.
[7]张鑫.单片机原理及应用(第2版)[M].北京:电子工业出版社,2013.
[8]陈桂友.增强型8051单片机实用开发技术[M].北京:北京航空航天大学出版社,2010.
[9]李晓林,牛昱光,阎高伟.单片机原理与接口技术(第2版)[M].北京:电子工业出版社,2011.
Design of Intelligent Vehicle Control Based on Bluetooth
Zheng Haicheng Yang Dongtao* Liu Yan Chen Xueyue Lu Jiongxin
(School of Electronics and Information Technology,Jiaying University,Meizhou 514015,Guangdong)
In this paper,we study the multifunctional intelligent car with Bluetooth remote control,and control the intelligent model using wireless Bluetooth technology.The system is composed of C51 micro-controller as the main control chip,L298N motor driver IC,hc-06 Bluetooth wireless module,1602 liquid crystal display module,ultrasonic module circuit.Based on mobile phone platform,a complete multifunctional smart car system is achieved with Bluetooth technology,achieving the functions of Bluetooth wireless remote control and automatic wall avoidance.
Bluetooth control;APP wireless control;intelligent vehicle
TP23
A
1008-6609(2016)05-0062-03
作者介绍:郑海城,男,广东揭阳人,研究方向:电子信息工程学院
*通信作者介绍:杨冬涛,女,广东梅州人,硕士,实验师,研究方向:信号与信息处理。
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
工业设计(2022年7期)2022-08-12
警察技术(2022年3期)2022-06-22
现代青年·精英版(2022年3期)2022-04-06
小天使·四年级语数英综合(2021年3期)2021-05-10
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
汽车文摘(2015年11期)2015-12-02
