
基于云架构的自适应聚类图像识别技术的研究与实现
2016-02-06 00:31黄学沛张佳峰汤岚钦
电脑与电信 2016年5期
黄学沛 张 燕 项 炬 张佳峰 汤岚钦
(1.长沙医学院临床学院,湖南 长沙 410219;2.长沙医学院计算机系,湖南 长沙 410219;3.长沙医学院基础医学院,湖南 长沙 410219)
基于云架构的自适应聚类图像识别技术的研究与实现
黄学沛1张 燕2项 炬3张佳峰2汤岚钦2
(1.长沙医学院临床学院,湖南 长沙 410219;2.长沙医学院计算机系,湖南 长沙 410219;3.长沙医学院基础医学院,湖南 长沙 410219)
针对移动平台提供高精度图像识别服务,对当前比较流行的SIFT和BRISK图像识别算法进行分析和研究,提出一种新型、高效、轻量级,适用于Android的自适应聚类图像识别算法。并基于Android平台设计了一套高精度图像识别系统,利用Android本身提供的各种资源开发图像识别软件。结果表明:该系统硬件设备简单,成本较低、系统可靠、易于使用和扩展。
Android;SIFT算法;大数据;图像识别
1 引言
图像识别是计算机视觉领域中活跃度很高的研究领域之一,其主要研究目标是利用计算机强大的运算能力,帮助人类自动处理海量的图像信息,识别各种不同图像类型的目标物以解放人类的部分劳动力,提高生活生产的效率。
图像识别技术是综合了多领域多学科的高新技术。随着智能手机处理能力不断增强,该技术也逐渐被应用到智能手机平台。但手机目前有限的处理能力和较少可用资源的问题对复杂的识别算法提出了考验。图像识别技术的基本原理是首先进行图像特征点提取,然后对它们进行算法分析,最后通过匹配特征点来确定图像数据库中的图像[1]。
当前手机上的图像识别技术主要有两种实现方式:第一种是依靠客户端/服务器模型(C/S模型)。首先在手机端获取要识别的图像,然后在服务器端完成特征点提取、分析等工作。第二种是对现有识别算法进行改进优化,在手机上完成全部工作。这两种实现方案各有优劣,第一种方案将繁杂的运算从手机转移到服务器,降低了系统开销并具备较高的效率。第二种方案通过改进算法,从算法层面减少运算和系统负载,但不利于样本库更新和数据同步。
针对以上所述两种方案的缺陷和不足,本文提出了一种自适应聚类图像识别方案。此方案相较于传统的图像识别算法,使用带图像重力线信息的特征点描述算法,能适应不同角度拍摄的图片以避免角度对结果产生干扰;建立图像数据库实现图像数据库的云端共享和快速查找;用户反馈对结果进行校正以提高识别精确度。实验结果表明,该算法识别速度快,准确率高,适合在智能终端使用。
2 架构设计
手机客户端通过调用Android提供的API打开摄像头对要进行识别的物体进行拍照并将图像保存到SD卡,然后通过POST发送到服务器,服务器对图像进行特征点检测、描述、匹配,最后把匹配结果发送给客户端,客户端将结果显示出来。系统架构图如图1所示。

图1 系统架构设计示意图
3 算法分析
本算法包括图像样本训练和在线识别两个阶段。
图像样本训练阶段。首先将所有样本转换为800x600像素以统一分辨率。通过带有重力方向的样本集提取brisk特征点并生成Freak特征描述符,然后选取前100个响应值较大的特征点,计算其重力方向和像素强度主方向的夹角。最后,建立图像指纹数据库,并将图像存储到数据库。下次只需要比对图像指纹即可进行识别。
在线识别阶段。手机打开摄像头并捕捉图像,以800x600像素裁剪图像,然后发送到服务器,服务器通过提取图像特征点,计算特征描述符和图像拍摄方向与重力方向的夹角,然后根据特征描述符进行图像指纹匹配,最后将结果发送给手机。
4 算法设计
本算法包括两个部分,第一部分(算法1)定义了图像指纹数据库的结构;第二部分(算法2)对要识别的图像进行图像指纹检测。
算法1 定义图像指纹数据库
本算法采用经过改进的SIFT描述符,文献[2]中阐述了FREAK、SURF、BRISK和原算法之间的一些主要区别。SIFT是一种基于尺度不变局部特征算法,在图像特征点匹配方面具有良好的效果[3]。原SIFT算法描述子的维数是128维,像素范围是256。因为维数过高,它的计算量非常庞大。本文使用的改进SIFT算法以圆形区域代替原来的256特征区域并将区域扩大为400。
为了让特征描述符具备旋转不变性,需要使用图像局部特征来为每一个关键点分配一个主方向。使用关键点邻域像素的梯度方向分布规律为每个关键点指定方向参数,使特征描述符具备旋转不变性。

其中,(1)式和(2)式分别代表点(x,y)处的梯度模值和方向。然后使用直方图统计邻域像素的梯度模值和方向,其范围为0~360度,共36柱,将直方图进行高斯平滑处理,以区分各像素点的影响值。离中心点越近,其权值越大。以直方图的最大值作为关键点主方向。为了增强鲁棒性,将大于主方向最大值80%的方向作为辅助方向。将以特征点为中心的256像素大小的圆形区域划分为邻域并均匀分为16个子域,分别计算每个子域的梯度方向直方图。然后,对16个子域的8方向梯度直方图依据位置依次排序,这样就构成了一个128维的SIGT特征描述子。如图2所示。
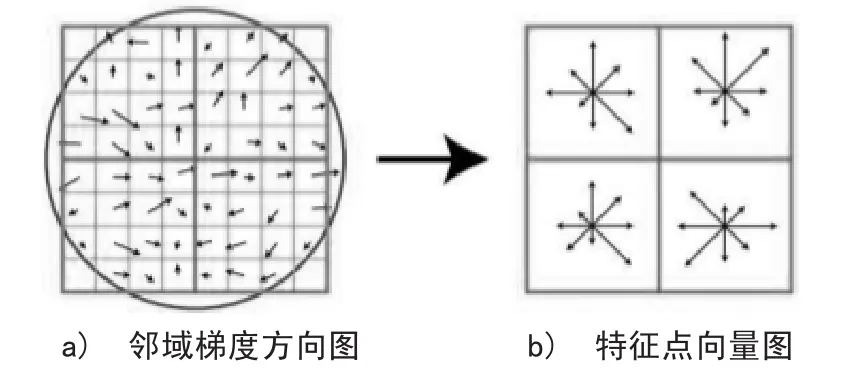
图2 以特征点为中心选取8×8大小的窗口
算法2 对图像进行图像指纹检测
特征点是图像局部区域中变化最显著的部分,本文采用计算量小的BRISK特征点检测算法,在适合移动终端的同时保证了提点算法的即时性。
建立尺度空间后,需要寻找尺度空间的极值点。每一个采样点要和它所有的相邻点比较。检测点和它同尺度的8个点以及相邻上下尺度的18个点进行比较,若该点的值比它们都大或者都小,那么便可认为该点为该尺度下的一个特征点。
由于DoG值对噪声和边缘比较敏感,因此得到的特征点还需经过进一步检验才能使用。对尺度空间DoG函数进行曲线拟合以提高其稳定性,使用DoG函数在尺度空间的泰勒展开式为:

其中,X=(x,y,σ)T,求导并令D(X)等于零,即可得到极值点的位置为:

将精确位置代入拟合函数以剔除低对比度的点,取前两项,为了去除低对比度的点,将(4)式所得结果代入拟合函数,取前两项,如果D(x)>=0.03则保留该特征点,否则就剔除该特征点。
将在尺度空间中搜索到的所有角点作为预备特征点,然后在邻层进行非极大值抑制运算。最后被确认为特征点的像素点P σ在上下邻层中对应的点P σ-1和P σ+1在各自的尺度层上也应该具有突出性,并且P σ的FAST得分应该比P σ-1和P σ+1都要高以确保图像特征点在尺度空间中的唯一性。
首先计算要识别图像A的特征向量集与图像指纹库中所有特征向量集的匹配点数目,然后选定匹配点数目最多的一张图像B来测试匹配率,当匹配率大于设定阈值时即为匹配成功的图像。设匹配率阈值为Mth,A与B的特征点数目设置为k 1、 k 2,匹配点数目设置为m。如果满足则说明两张图像的匹配程度较高,图像匹配成功。
5 实验结果及分析
实验设备为一台Nexus5手机。实验数据包括两组数据集:第一组为国际图像标准库UK-Bench[5],图像不含任何传感器信息,包含2100个不同物体,每个物体包括4个不用角度的图像。另一组为手机采集的带有重力方向信息的800个室外场景图像,每张图片包括5个不同视角的图像。
实验过程包括训练和在线识别阶段。训练阶段将所有图像转换为800x600像素。对手机拍摄的图片,提取它们的BRISK特征点并生成FREAK特征描述符,选取前100个响应值较大的特征点,计算像素强度主方向和重力方向的夹角,而对没有重力信息的标准库UKBench中的图像,仅计算其特征描述符并将夹角设置为0。在线识别阶段通过图像视觉信息和重力方向信息,提取图像特征点并计算特征描述符和特征方向与重力主方向的夹角,最后进行指纹匹配。
取不同参数阈值在不同规模图像库上的识别精度进行比较。在样本较少时,算法有较好的识别精度。本算法在汉明阈值R为40,匹配的特征夹角差阈值θ为30度,比率M为20%的时候有最好的效果。
6 结束语
本文提出了一种基于云架构的自适应聚类图像识别算法,解决了在智能手机上大量图像识别问题。在图像特征提取方面,使用带重力方向信息的BRISK特征点算法和用FREAK进行描述;在目标图像匹配方面,使用方向夹角来过滤相似特征的误匹配点以提高识别精度。实验结果证明,该识别算法可在Android平台上有效运行,该系统硬件设备简单,成本较低、系统可靠、易于使用和扩展。
[1]桂振文,刘越,陈靖,等.一种适用于智能手机的图像识别算法[J].电子学报,2014(8):1487.
[2]Alahi A,Ortiz R,Vandergheynst P.Freak:Fast retina key-point [A].Proceedings of the 25th IEEE Conference on Computer Vision and Pattern Recognition[C].Washing-ton:IEEE,2012:510-517.
[3]杨维,朱文球,罗哲,李旺.改进的sift特征匹配方法[J].电脑知识与技术,2015(9):130.
[4]E M air,G D Hager,D Burschka,M Suppa,et al.Adaptive and generic corner detection based on the accelerated seg-ment test[A].Proceedings of the 11th European Confer-ence on Computer Vision[C].Heidelberg: Springer,2010:183-196.
[5]D Kurz,S.Benhimane.Inertial sensor-aligned visual fea-ture descriptors[A].Proceedings of 24th IEEE Confer-ence on Computer Vision and Pattern Recognition[C].Piscataw ay:IEEE,2011:161-166.
Research and Realization ofAdaptive Clustering Image Recognition Technology Based on CloudArchitectures
Huang Xuepei1Zhang Yan2Xiang Ju3Zhang Jiafeng2Tang Lanqin2
(1.College of Clinical Medicine,Changsha Medical University,Changsha 410219,Hunan; 2.College of Computer Science,Changsha Medical University,Changsha 410219,Hunan; 3.College of Basic Medicine,Changsha Medical University,Changsha 410219,Hunan)
This paper provides high-precision image recognition service for mobile platforms.It analyzes and researches on SIFT and BRISK algorithm,and proposes a novel,efficient,lightweight adaptive clustering algorithm for image recognition which is suitable for Android.It designs a high-precision image recognition system based on the Android platform,using a variety of resources of Android to develop image recognition software.The results show that the system hardware is simple,low-priced,reliable, easy to be used and extended.
Android;SIFT algorithm;big data;image recognition
TP391.41
A
1008-6609(2016)05-0030-03
黄学沛,男,湖南衡阳人,本科,研究方向:临床医学。
2015年度湖南省大学生研究性学习和创新性实验计划项目,项目编号:湘教通[2015]269号第538。
猜你喜欢
科学大众(2022年23期)2023-01-30
测绘学报(2022年12期)2022-02-13
中华养生保健(2020年10期)2021-01-18
计算机应用与软件(2020年6期)2020-06-16
科普童话·神秘大侦探(2020年3期)2020-05-11
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2019年2期)2019-02-14
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
