
基于单片机的电控发动机怠速模糊控制器实现
2016-02-05 07:30徐晓丽
上海电力大学学报 2016年6期
徐晓丽
(上海电力学院 自动化工程学院, 上海 200090)
基于单片机的电控发动机怠速模糊控制器实现
徐晓丽
(上海电力学院 自动化工程学院, 上海 200090)
针对发动机怠速工况显著的时变性、非线性和不确定性,以80C196KC单片机作为控制器,设计了一种以发动机转速偏差及偏差变化为模糊输入、以旁通电磁阀占空比和点火提前角为模糊输出的模糊控制器.实验结果表明,该模糊控制实现了稳定怠速控制,且与原系统相比,降低了怠速目标转速,并具有更好的冷却水温适应性.
单片机; 怠速工况; 模糊控制; 旁通电磁阀占空比; 点火提前角
发动机怠速工况是一种典型运行工况,即发动机工作而汽车不行驶的状态,行车过程中大约1/3的时间都处于怠速工况[1].
发动机怠速工况的工作过程十分复杂,影响因素很多,且与燃烧过程直接相关,非线性和不确定性显著,因此很难用精确的数学模型来描述此过程.模糊控制方法能够处理对象的定性信息以及运用人的经验和技巧,特别适用于数学模型很难建立或根本无法建立的被控对象.目前,模糊技术在汽车的一些电控子系统中得到了应用,并取得了显著的控制效果[2-3],但只通过对怠速进气量的调节来提高怠速工况的稳定性.
在稳定怠速工况下,由于燃烧的随机性,发动机的怠速存在天然的、随机的转速浮动,仅对怠速进气量进行反馈控制并不能克服转速波动.点火提前角的大小会影响发动机的转矩,进而对怠速转速产生影响,并且改变点火提前角来控制怠速转速具有更快的响应速度和更高的精度[4].因此,设计模糊控制器时,应综合考虑怠速进气量和点火提前角对稳定怠速的影响,同时进行调节,以期达到良好的控制效果.
1 电控发动机闭环怠速模糊控制系统


图1 电控发动机闭环怠速模糊控制过程
控制系统中使用80C196KC单片机作为控制器[5],发动机的瞬时转速n利用80C196KC单片机的高速输入端口HSI的定时功能通过计算得到.上止点位置传感器每隔180° CA向控制器发送一次采集到的脉冲信号,高速输入端口对相邻信号时间间隔进行定时计数.控制器根据定时器T1计数值的大小,计算发动机180° CA的平均转速.实验中,单片机采用12 MHz晶振,在此晶振下,80C196KC定时器T1的每个计数值对应(4/3)μs时间.假定相邻信号时间间隔里,定时器T1的计数值增加量为ΔT,则发动机转速n可表示为:
(1)
另外,控制系统采用负温度系数的热敏电阻检测冷却水温度,并据此设定怠速目标转速.控制器专门设计了各种输入(如转速信号、水温信号等)传感器接口电路和输出执行机构(如怠速旁通阀、点火线圈、喷油器等)的驱动电路.发动机运行过程中,控制器接收传感器的输入信号并对其进行处理,判断发动机当前的运行情况,按预先制定的控制策略来调节各个执行器的具体动作.
2 模糊推理器
2.1 模糊推理器结构
模糊控制系统的核心是模糊推理器,其流程结构如图2所示[2].

图2 模糊推理器结构
由图2可知,模糊推理器的3个组成部分均包含程序和数据,数据又分为变量和参数两类,其中变量有系统输入、由模糊化计算输入变量得到的模糊输入变量、模糊输出变量,以及根据反模糊化计算得到的系统输出;参数包括输入隶属函数、推理规则和输出隶属函数.
2.2 梯形输入隶属函数实现
用P1,P2,P3,P4表示图3中梯形输入隶属函数的顶点,每个顶点用一个字节来存储,这样存储一个隶属函数需占4个字节.本模糊控制器中,共有两个输入变量,每个输入变量划分为7个模糊子集,这样占据的ROM(只读存储器)空间为64字节.图3中,x表示论域,u表示隶属度,隶属度的取值区间是[0,1](存储器中,用0FFH来表示1;用00H来表示0).编程中,将量化后的输入变量和隶属度皆用单字节来存放.

图3 梯形输入隶属函数
2.3 输出变量的隶属函数实现
模糊控制输出变量为旁通电磁阀占空比(PWM)和点火提前角(AST),也包含7个模糊子集,即:{负大(NB),负中(NM),负小(NS),零(O),正小(PS),正中(PM),正大(PB)},论域均为[-6,6];由于旁通电磁阀占空比和点火提前角相互独立,因此均采用单点隶属函数形式,即隶属函数值非零即1,如图4所示.这样只需一个字节即可完成函数存放,数据结构非常简单.

图4 单点隶属函数
3 模糊推理
3.1 模糊数规则表及实现
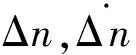

表1 模糊子集编号
4位二进制数即可表示各模糊语言变量的值即隶属函数名,用一个字节表示一条规则的两个前提,其中第一前提对应高4位、第二前提对应低4位的模糊取值.同样用一个字节表示规则的结论,高低4位分别表示第一和第二结论的模糊值.如此存储控制规则,既节省内存,又利于快速实现查找和推理.
为将发动机的怠速转速波动控制在最小范围,根据人们对发动机怠速控制的实际经验及控制策略,利用模糊集合理论、语言变量及模糊关系将人的控制规则总结成模糊控制规则表,如表2所示.
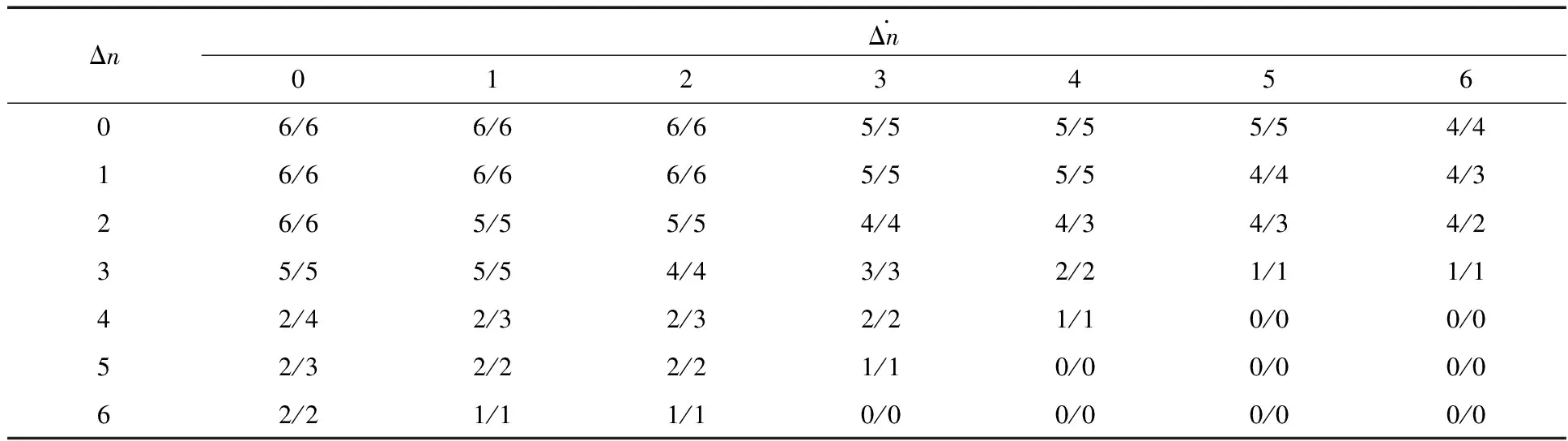
表2 AST/PWM模糊数规则
3.2 模糊推理实现
在数字单片机中,通常采用MAX-MIN推理合成算法进行模糊推理,并产生模糊输出结果[6].MAX-MIN模糊推理的步骤如下:
(1) 在内存RAM(随机存取存储器)中开辟一段存储空间,用来存放所有的模糊输出变量,并对该空间清零;
(2) 取一条规则前提的高4位作为地址偏移量,加上第一前提在内存RAM中存放的首地址,可在RAM内找出第一前提模糊输入量的隶属度u1,若u1不为零,再取前提的低4位作为地址偏移量,加上第二前提的首地址,在RAM内找出第二前提模糊输入量的隶属度u2;
(3) 取两个前提隶属度的最小值作为该规则结论模糊子集的隶属度u,即u=min(u1,u2);
(4) 取规则结论的高4位作为地址偏移量,加上PWM模糊输出量的RAM区首地址,求出PWM结论模糊子集在RAM中的存放地址,将u与该单元的原先存放值进行比较,并将较大值存放于该单元,取规则结论的低4位作为地址偏移量,加上AST模糊输出量的RAM区首地址,求出AST结论模糊子集在RAM中的存放地址,将u同样作上述处理.
4 输出变量的反模糊化
在控制系统中,控制器输出的控制量必须是一个精确量,而模糊控制器推理得到的是模糊输出量及其相应的隶属度,故采用加权平均方法求出所有模糊输出量作用的精确值,其计算公式为:
(2)
式中:Ui——第i个输出变量的值;μij——第i个输出变量的第j个模糊输出变量的值;
yij——第i个输出变量的第j个模糊子集的支持值;
ni——第i个输出变量对应的模糊子集(模糊输出变量)的数目.
可见,反模糊化处理时,找出存储于ROM中的模糊输出量隶属度表,取出隶属度不为零的μij,及对应的该模糊子集的支持值yij,一一对应求积后再求和,并除以所有模糊输出量的隶属度之和,即可求得精确的输出值Ui,可见所有隶属度不为零的模糊输出量对控制输出都有作用.
5 实验结果及分析
发动机怠速模糊控制器调试完成后,使用某电喷发动机进行台架试验,测取模糊控制后发动机的怠速稳定性曲线,如图5所示.
由图5a可知,水温12 ℃时,怠速模糊控制系统目标转速为1 150 r/min,怠速转速与目标转速的最大偏差为16 r/min;原机怠速目标转速为1 200 r/min,原机怠速转速与目标转速的最大偏差为17 r/min,可见模糊控制降低了目标怠速,对怠速转速的稳定性亦有所改善.
图5 模糊控制怠速曲线
由图5b可知,水温98 ℃时,怠速控制系统目标转速为800 r/min,怠速转速与目标转速的最大偏差为12 r/min;原机怠速目标转速为800 r/min,目标转速与怠速转速的最大偏差为11 r/min,可见模糊控制前后怠速稳定性相当.
6 结 语
本文实验结果验证了所设计的模糊控制方法的有效性,与原控制系统相比,模糊控制方法对冷却水温的变化具有更好的适应性,能降低怠速目标转速,获得更好的燃油经济性,且能很好地稳定怠速波动.
[1] ENDRES H,NEUBER H J,WURMS R.Influence of swirl and tumble on economy and emissions of multivalve SI engines[J].SAE,1992(5):528-536.
[2] 张振东,陈万忠.汽油机怠速转速闭环控制系统的研究[J].农业机械学报,2000,31(1):12-14.
[3] 罗小青,黄云奇.基于PID-Fuzzy理论的发动机怠速控制系统研究[J].小型内燃机与摩托车,2010,39(3):1-4.
[4] WANG L B,FAN J.Study of self-adaptive RBF neural network control method for the engine idle speed control[C]//Proceedings of 2011 International Conference on Consumer Electronics,Communications and Networks.Xianning,China:IEEE,2011:2 633-2 636.
[5] 徐爱卿.Intel 16位单片机:修订版[M].北京:北京航空航天大学出版社,2002:7.
[6] 朱相磊,苏觊,马汉华.模糊控制器的数字单片机实现方法[J].山东电子,1998(2):5-7.
(编辑 桂金星)
Realization of Engine Idle-speed Fuzzy Controller Based on SCM
XU Xiaoli
(SchoolofAutomationEngineering,ShanghaiUniversityofElectricPower,Shanghai200090,China)
In view of the significant features of being non-linear,time-varying and uncertain on the part of the engine idling condition,a fuzzy controller is designed based on 80C196KC single-chip microcomputer(SCM).The double fuzzy inputs are engine speed deviation and its change,while the double fuzzy outputs are duty ratio of the bypass electromagnetic valve and ignition advance angle.Experimental results show that the fuzzy controller realizes the stable idle-speed control and has smaller idle speed target,better adaptability to cooling water temperature.
single-chip microcomputer; idle-speed condition; fuzzy controller; duty ratio of the bypass electromagnetic; valve ignition advance angle
10.3969/j.issn.1006-4729.2016.06.006
2015-06-30
简介:徐晓丽(1972-),女,硕士,副教授,江苏泰州人.主要研究方向为智能控制及故障诊断.E-mail:xuxiaoli@shiep.edu.cn.
TP273
A
1006-4729(2016)06-0534-04
猜你喜欢
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
阜阳师范大学学报(自然科学版)(2020年3期)2020-08-13
南京大学学报(数学半年刊)(2020年1期)2020-03-19
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
