采用自适应模糊PID的二阶倒立摆控制
2016-01-22 09:07:44宋国杰
华侨大学学报(自然科学版) 2016年1期
宋国杰
(四平职业大学 电子工程学院, 吉林 四平 136002)
采用自适应模糊PID的二阶倒立摆控制
宋国杰
(四平职业大学 电子工程学院, 吉林 四平 136002)
摘要:建立一个二阶倒立摆的数学模型,将常规比例-积分-微分(PID)控制与模糊控制相结合,设计模糊PID控制器,实现PID参数的自适应模糊整定.仿真实验表明:所设计的模糊PID控制器能很好地实现二阶倒立摆的扶起平衡控制,控制效果明显好于常规PID控制器,超调量和调节时间较小,具有较好的抗干扰能力,非常适合二阶倒立摆模型的稳定控制.
关键词:倒立摆; 模糊控制; 比例-积分-微分控制器; 自适应; 稳定控制
作为一个典型的不稳定、高阶次、强耦合、多变量非线性系统,倒立摆模型是控制领域内众多专家学者关注和研究的对象[1-2].通过倒立摆模型,可以对已有的控制方法和理论进行模拟和验证,从而提出一些新的理论方法,并将其应用于人工智能、生物工程、计算机视觉、航空航天等领域.目前,对于倒立摆的控制主要包括状态反馈、线性二次型调节器(LQR)等现代控制理论方法,根轨迹、比例-积分-微分(PID)等经典控制理论方法,以及模糊、神经网络、支持向量机等智能方法.其中,PID方法由于理论成熟、便于实现,在倒立摆的控制中应用最为广泛[3-6].尽管如此,PID方法还是存在一些缺陷,如泛化能力差、鲁棒性不高等.除了PID方法,模糊理论也是应用较多的一种方法[7-9].然而,模糊控制方法的适应性较差,当系统参数改变,或出现未知状况时,控制效果明显变差.因此,将两者结合的研究成果也开始出现,但这些研究目前主要集中于一阶或平面倒立摆[10-11].本文将直线二阶倒立摆作为研究对象,将PID控制和模糊控制相结合,设计一种自适应模糊PID控制器.
1二阶倒立摆的数学模型
一个典型的直线二阶倒立摆模型主要由小车、两个摆杆和连接块组成[12-13],如图1所示.由于多了一级摆杆,其复杂性远高于一阶倒立摆.

图1 直线二阶倒立摆示意图Fig.1 Linear second-order inverted pendulum schematic
首先,根据倒立摆模型的物理学运动规律建立微分方程,即

对式(1)在系统平衡点处进行线性化处理,可得系统的状态方程为

2模糊PID控制器设计
2.1 控制器结构
在设计控制器时,考虑将PID算法和模糊算法有机结合,既利用前者的实用性,又结合后者的智能性.根据对二阶倒立摆模型参数和稳定条件的分析,在设计模糊推理时,采用Mamdani的形式,通过在线方式实时调节PID算法的3个参数[13-14].具体思路为:将一个常规PID控制器作为主控制器,另设计一个模糊推理模块,利用该模块对PID控制器的比例、积分和微分3个参数进行自适应整定.
此外,文中进行了两点改进.1) 以往大多数的模糊推理模块只是单纯地将偏差E作为输入,为了更为客观、迅速地反映系统变化,将偏差变化率CE也作为一个输入.2) 设计模糊推理模块的输出为参数的变化调整量,则PID算法只需进行相应的调整即可.这样模糊推理模块就形成了一个2输入、3输出的结构,具体如图2所示.由图2可知:该控制器结构同时具有PID和模糊两种算法的优点,其动态和静态性能较好,非常适合二阶倒立摆这样的非线性动态系统控制.
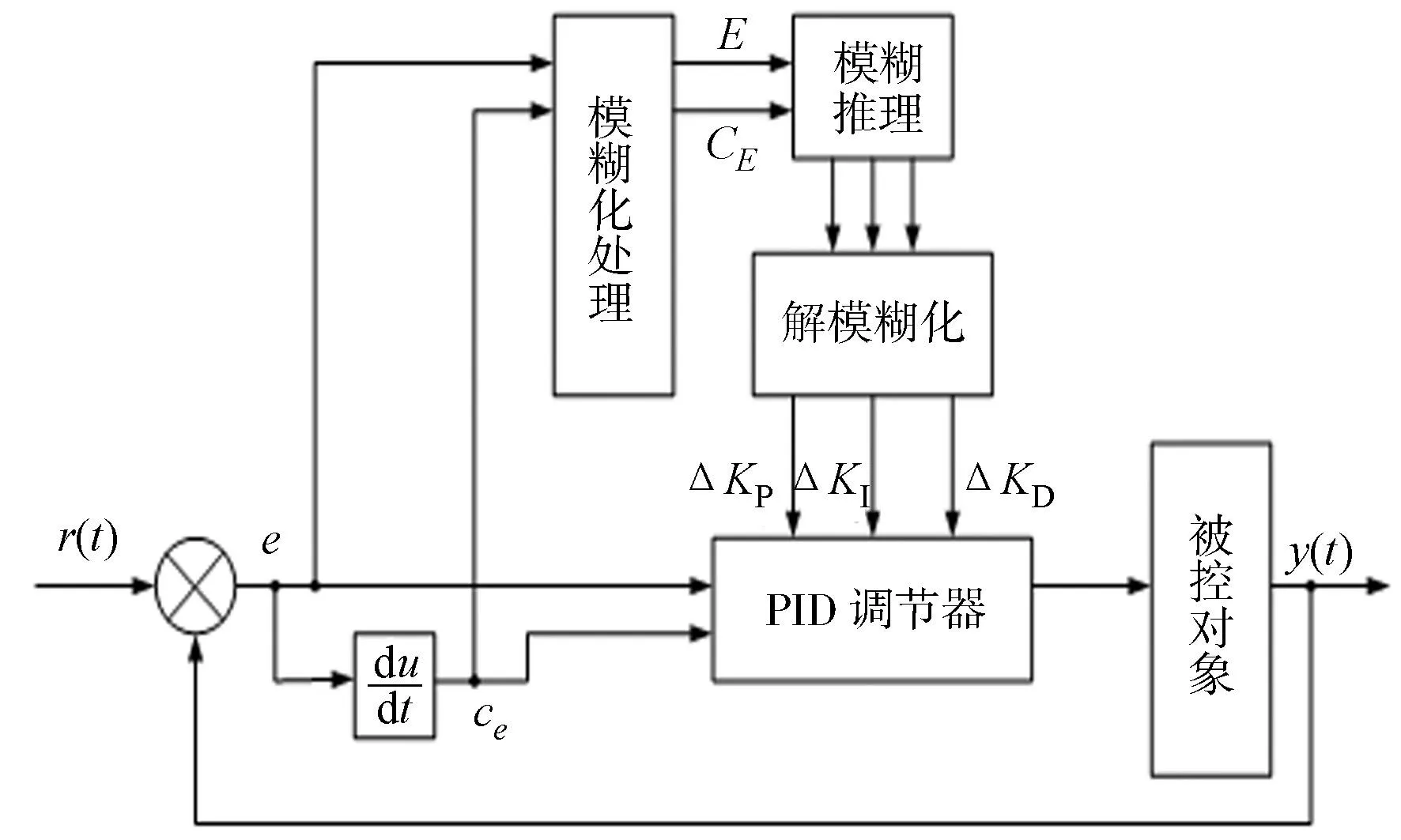
图2 模糊PID控制器结构Fig.2 Structure of the fuzzy PID controller
2.2 控制规则的制定
根据设计的模糊PID控制器的结构,将二阶倒立摆的摆杆1和摆杆2所在的角度偏差E及其变化率CE作为系统输入.设定角度偏差E和偏差变化率CE的模糊子集为{负大,负中,负小,零,正小,正中,正大},利用符号表示为{NB,NM,NS,Z,PS,PM,PB},输出模糊子集与其具有相同形式的符号表示.根据E和CE对系统影响程度的不同,当变化超过60%时,即达到了模糊推理模块的最大值,故设定E和CE基本论域分别为[-80,80],[-10,10],输入量的模糊论域为[-6,6];3个输出变量ΔKP,ΔKI和ΔKD的基本论域为[-0.4,0.4],[-0.06,0.06],[-3, 3],模糊论域为[-3,3].考虑到等三角函数的灵敏度较高,可以在论域范围内均匀分布,故将其作为隶属度函数.
据此,对PID算法的比例 KD、积分KI、微分KD等3个参数制定不同情况下的整定规则.
1) 当角度偏差E变化较大时,很可能出现微分过饱现象,使系统超出控制范围.为了保证系统能够快速响应,KP应设定为一个较大数值,KD相应的需设定较小一些,同时取KI,防止系统超调过大.
2) 当角度偏差E和偏差变化率CE的值在适中范围时,既要考虑系统的超调不能过大,又要保证系统具有较快的响应速度,KP需设定一个较小的数值,KI和KD取值适中即可.
3) 当角度偏差E变化较小时,首先,需要让系统维持较好的稳定性,KP和KI都应设定较大的数值;其次,考虑降低系统振荡的风险,KD应与角度偏差变化率CE的取值进行相反设定.
针对比例KP、积分KI、微分KD等3个参数的模糊控制规则,分别如表1~3所示.

表1 KP模糊控制规则表Tab.1 FuzzycontrolruletableofKPECENBNMNSZPSPMPNNBPBPBPMPMPSZZNMPBPBPMPSPSZNSNSPMPMPMPSSNSNSZPMPMPSZNSNMNMPSPSPSZNSNSNMNMPMPSZNSNMNMNMNBPNZZNMNMNMNBNB表2 KI模糊控制规则表Tab.2 FuzzycontrolruletableofKIECENBNMNSZPSPMPNNBNBNBNMNMNSZZNMNBNBNSNSNSZZNSNMNMNSZZPSPSZNMNSZPSPSPMPMPSNSNSPSPSPSPMPBPMZPSPSPMPMPBPBPNZPSPMPMPMPBPB表3 KD模糊控制规则表Tab.3 FuzzycontrolruletableofKDECENBNMNSZPSPMPNNBPSNSNBNBNSNMPSNMPSNSNSNMNSNSZNSZNSNMNMZNSZZZNSNSNSPSNSZPSZZZZPSZZPMPBNSPSPSPSPBPBPNPSPMPMPMPSPBPB
3仿真实验分析
对提出的模糊PID控制器的二阶倒立摆控制性能进行仿真分析,并与文献[4]提出的PID方法进行对比.利用Matlab软件的Simulink模块,搭建PID控制算法的系统,结果如图3所示.这3个PID控制器分别控制小车位移r和两个摆杆的角度α1和α2[15].对于二阶倒立摆这样的典型不稳定系统,初始值的不同对于PID算法的控制效果具有很大的影响,选择不当会使控制品质下降,甚至系统发散.

图3 PID控制仿真结构图Fig.3 PID control simulation chart
选择两组初始参数,分别设定为 (r,α1,α2)={0,0,0},(r,α1,α2)={-0.1,-0.2,-0.1},控制效果如图4所示.由图4可知:PID方法对于二阶倒立摆具有一定的控制效果,要求系统初始参数选择适当;第一组参数明显具有更短的调节时间,但第二组参数的超调量更小.此外,PID方法的3个参数也需根据经验或经过多次反复试验给定,泛化性较差.
(a) 第一组 (b) 第二组图4 参数的PID仿真结果Fig.4 PID simulation results with the parameters
其次,根据设计的模糊PID控制器搭建系统模型,将图3中的3个常规PID控制器替换为图5所示的模糊PID控制器即可,其他不变.在仿真过程中,仍取上述相同的两组初始条件,仿真结果如图6所示.由图6可知:模糊PID对于二阶倒立摆具有较好的控制效果.相较于常规PID方法,模糊PID降低了系统对于初始值的敏感度,两组参数情况下的控制效果相当,超调量和调节时间都明显较小,且明显好于常规PID方法.

图5 模糊PID控制器仿真模型Fig.5 Simulation model of fuzzy PID controller
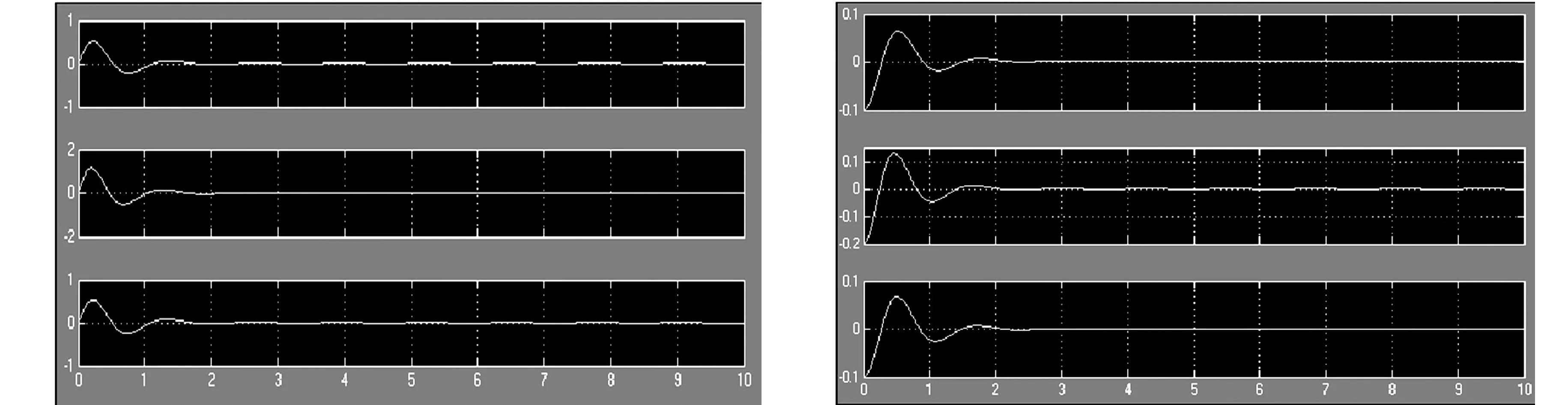
(a) 第一组 (b) 第二组图6 参数的模糊PID仿真结果Fig.6 Fuzzy PID simulation results with the parametres
最后,在程序编译成功之后,采用手动方式将摆杆提到中间的一个平衡位置,运行程序,其控制效果如图7,8所示.
由图7,8可知:模糊PID方法对于二阶倒立摆系统控制的稳定度明显高于常规PID方法,两个摆杆角度的变化幅度也明显较小.多次改变系统初始参数,控制效果基本相同,这里不一一赘述.

图7 PID控制器的实际控制结果 图8 模糊PID控制器的实际控制结果Fig.7 Actual control results for PID controller Fig.8 Actual control results for fuzzy PID controller
在系统运行过程中,突然施加一个外部扰动,考察模糊PID方法的抗干扰性,控制结果如图9所示.由图9可知:在系统运行第3s时,突然受到一个外部干扰,但是在大概2s以后就迅速恢复为稳定状态,而且系统的超调量较小,说明模糊PID方法对于外部扰动具有较好的抑制作用.

图9 扰动情况下模糊PID控制器的实际控制结果Fig.9 Actual control results for fuzzy PID controller with disturbance
综合比较以上结果可知,所设计的模糊PID控制器对二阶倒立摆具有较好的控制效果,无论是超调量,还是调节时间都明显好于常规PID方法.
4结束语
采用自适应模糊PID对直线二阶倒立摆的控制问题进行研究.首先,建立二阶倒立摆的数学模型,反映出其是一个典型的不稳定系统;其次,将常规PID算法与模糊理论相结合,设计模糊PID控制器,可以实现PID参数的自适应模糊整定[16].仿真及实测实验表明:所设计的模糊PID控制器可以很好地实现二阶倒立摆的扶起平衡控制,控制效果明显好于常规PID控制器,超调量和调节时间较小,并具有较好的抗干扰能力,为直线二阶倒立摆的控制问题提供了一条可借鉴的思路.
参考文献:
[1]赵建军,魏毅,夏时洪,等.基于二阶倒立摆的人体运动合成[J].计算机学报,2014,37(10):2187-2195.
[2]吴震宇,方敏,丁康.基于LabVIEW的二级倒立摆控制系统三维仿真[J].合肥工业大学学报(自然科学版),2011,34(10):1480-1484.
[3]项雷军,王涛云,郭新华.多区域互联电网的分散式模糊PID负荷频率控制[J].华侨大学学报(自然科学版),2014,35(2):121-126.
[4]杨平,徐春梅,贺茂康,等.直线二级倒立摆的PID实时控制[J].上海电力学院学报,2008,24(3):236-238.
[5]王宏楠.基于RBF神经网络二级倒立摆系统的PID控制[J].辽宁石油化工大学学报,2010,30(2):58-61.
[6]王俊.基于倒立摆的PID控制算法的研究[J].现代电子技术,2012,35(23):152-154.
[7]李红伟.单级倒立摆的简化模糊控制及仿真研究[J].控制工程,2010,17(6):769-773.
[8]侯涛,牛宏侠.平面一级倒立摆的双闭环模糊控制研究[J].兰州交通大学学报,2011,30(4):11-19.
[9]侯涛,范多旺,杨剑锋.基于T-S型的平面倒立摆双闭环模糊控制研究[J].控制工程,2012,19(5):753-756.
[10]王子涛,王家军,何杰.基于自适应模糊PID平面倒立摆的建模与仿真[J].杭州电子科技大学学报,2010,30(4):86-91.
[11]杨治明,宋乐鹏,杨清林,等.基于模糊控制和PID控制的一阶倒立摆系统建模与仿真[J].北华大学学报(自然科学版),2012,13(3):356-359.
[12]洪江,周明华.二阶倒立摆的稳定性控制[J].科技资讯,2012,36(27):70-71.
[13]王春民,栾卉,杨红应.倒立摆控制的设计与仿真[J].吉林大学学报(信息科学版),2009,6(3):242-247.
[14]王广雄,张静,罗晶,等.倒立摆的模型和控制问题[J].电机与控制学报,2004,8(3):247,262-295.
[15]柴军营,何广平.倒立摆的一种新的控制方法[J].北方工业大学学报,2007,4(3):26-30.
[16]李贤涛,张葆,赵春蕾,等.基于自适应的自抗扰控制技术提高扰动隔离度[J].吉林大学学报(工学版),2015,6(1):202-208.
(责任编辑: 钱筠英文审校: 吴逢铁)

ResearchonDoubleInvertedPendulumControl
UsingAdaptiveFuzzyPID
SONGGuojie
(CollegeofElectronicEngineering,SipingVocationalCollege,Siping136002,China)
Abstract:In this paper, a mathematical model of second-order inverted pendulumis built. The conventional proportional-integral-differential (PID) control and fuzzy controlare combined, and a fuzzy PID controlleris designed. The adaptive fuzzy tuning of PID parameters is obtained. Simulation results show the designed fuzzy PID controller can well realize the propped balance control of second-order inverted pendulum, the control effect is obviously better than the conventional PID controller, the overshoot and adjust time is small, and has a good anti-jamming capability. It is very suitable for the stability control of the model of second-order inverted pendulum.
Keywords:inverted pendulum; fuzzy control; proportional-integral-differentia controller; adaptive; stability control
基金项目:吉林省教育厅“十一五”科学技术研究项目(2012年度)
通信作者:宋国杰(1978-),女,副教授,主要从事电子技术、可编程逻辑控制器和自动控制的研究.E-mail:songguojie530@sina.com.
收稿日期:2015-11-13
中图分类号:TP 391.9
文献标志码:A
doi:10.11830/ISSN.1000-5013.2016.01.0074
文章编号:1000-5013(2016)01-0074-05
猜你喜欢
科技视界(2016年26期)2016-12-17 15:53:57
中学课程辅导·教师教育(上、下)(2016年20期)2016-12-01 01:26:15
数学学习与研究(2016年19期)2016-11-22 11:30:53
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
汽车科技(2016年5期)2016-11-14 08:03:52
中国新通信(2016年16期)2016-10-18 10:54:54
考试周刊(2016年65期)2016-09-22 22:03:24
考试周刊(2016年59期)2016-08-23 18:08:56
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01