
转台伺服系统的动态滑模控制研究
2015-12-31 11:56于启洋
上海航天 2015年5期
陈 坤,闵 斌,于启洋,张 垚
(1.上海航天控制技术研究所,上海 200233;2.山东信息通信技术研究院,山东 济南 250101)
0 引言
近年来,随着航空、航天技术的发展,各种高精度飞行器获得了大力发展。作为仿真及测试与分析试验的平台,对转台的相应性能要求也越来越高,这些性能要求包括超低速、高精度、宽调速、高频响等。长期以来,传统PID控制在伺服控制领域被广泛应用,但该控制策略很难处理系统不确定性的影响。在实际转台控制系统中,因各种因素的影响,使转台控制系统中存在非线性因素:摩擦力矩、干扰力矩、耦合力矩等多个不确定项,如转动惯量(源自负载变化)等参数变化;高频未建模动态及机械谐振;测量延时及测量噪声[1]。由于上述因素的存在,无法建立精确的数学模型,如忽略对象的不确定性,根据近似或简化模型设计控制器,被忽略的因素可能会引起控制系统品质的恶化,甚至导致系统的不稳定。因滑模变结构控制对外部干扰和不确定性具强鲁棒特性,故可基于滑模变结构控制理论,设计动态滑模控制器,以提高转台控制中的抗干扰性[2-3]。对常规滑模控制器,其最大缺点是抖振明显,可引入动态滑模控制器以削弱传统滑模控制带来的抖振。本文对转台伺服系统的动态滑模控制进行了研究。
1 转台伺服系统模型
在控制系统设计中,需先解决控制对象的数学建模。本文研究的转台控制系统由三个独立通道组成,控制结构基本相同,在正常情况下其中任意框的模型可简化为线性二阶环节系统。该系统采用直流力矩电机驱动,忽略电枢电感影响。DSMC结构如图1所示。图中:Kpu为功放增益;Km为转矩系数;Ke为反电动势系数;J为转动惯量;Df为干扰力矩;Ra为电枢电阻;Θ(s),Ω(s)分别为角位置θ与角速度的拉氏变换。
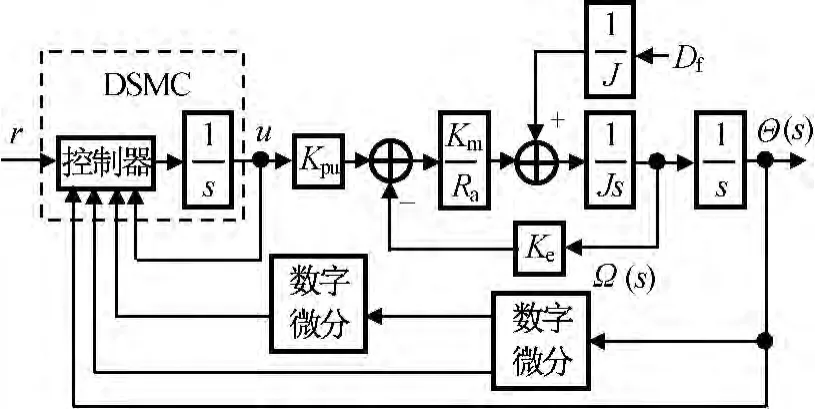
图1 DSMC转台伺服系统结构Fig.1 Strueture of DSMC tumate servo system
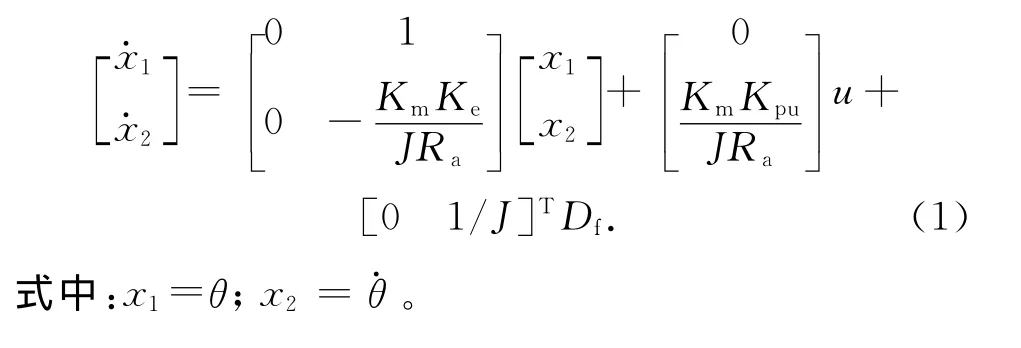
对图1所示的系统,其状态方程可表示为
2 动态滑模控制
动态滑模方法是将常规滑模变结构控制中的切换函数s通过微分环节构成新的切换函数δ,该切换函数与控制器输出的一阶或高阶导数有关,可将不连续项转移至控制的一阶或高阶导数中,得到在时间上本质连续的动态滑模控制律,有效削弱抖振。
2.1 控制器设计
设跟踪误差

式中:r为位置指令;R= []T;X= [x1x2]T=[]T。
定义切换函数

式中:D为大于0的常数;C=[c1c2];u为控制量。当s=0时,Du=-CE。为形成负反馈,要求C<0。则切换函数的一阶导数

采用指数趋近律

则由式(4)、(5)可得动态控制律

2.2 稳定性分析
定义Lyapunov函数V=0.5s2,则

将式(6)代入式(8)可得
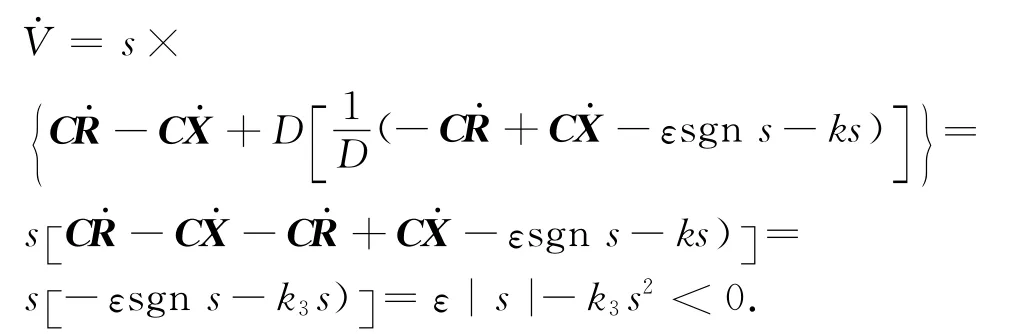
故本文设计的动态滑模控制律Lyapunov稳定。
3 仿真
本文某三轴转台中的一个框架为例,在Simulink软件中搭建相关模型。取系统模型:Ra=6.3Ω,Ke=6V/(rad·s-1),Km=3.8N·m/A,J=0.9kg·m2。 动 态 滑 模 控 制 律 中,取C=-[300 0.095],D=0.003,ε=0.1,k=20。取位置参考输入信号r(t)=0.001sin(4πt),外加干扰力矩Df=5sin(20πt)。仿真结果如图2~3所示。
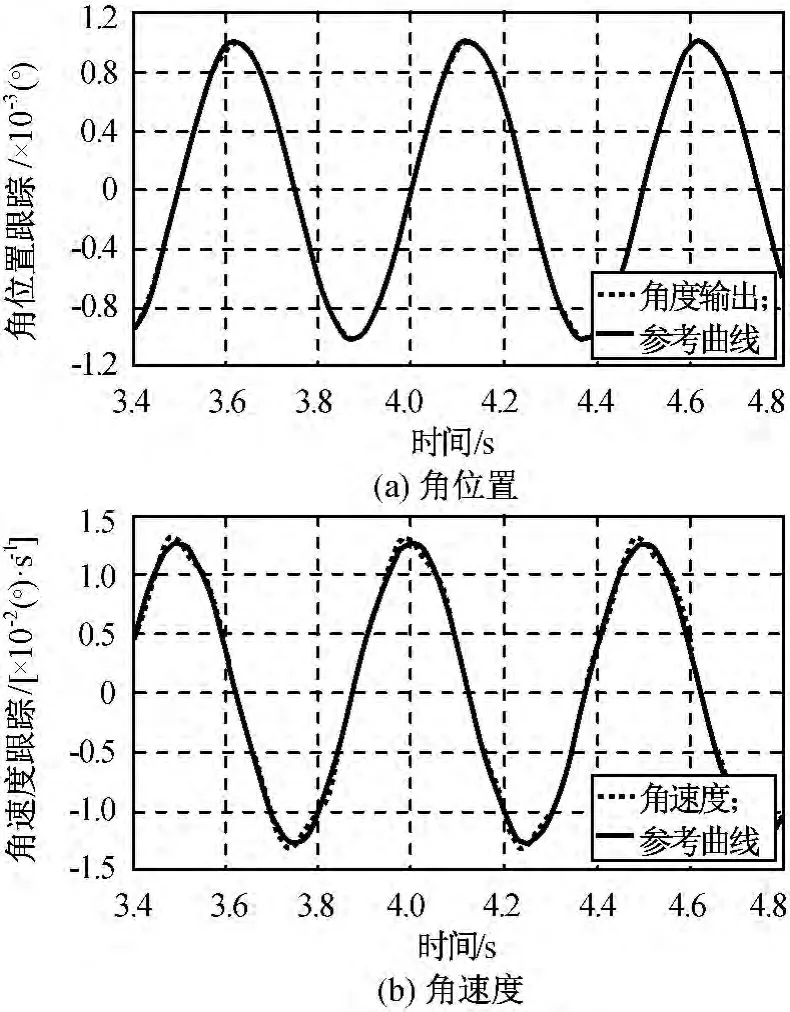
图2 PID跟踪结果Fig.2 Tracing result of PID
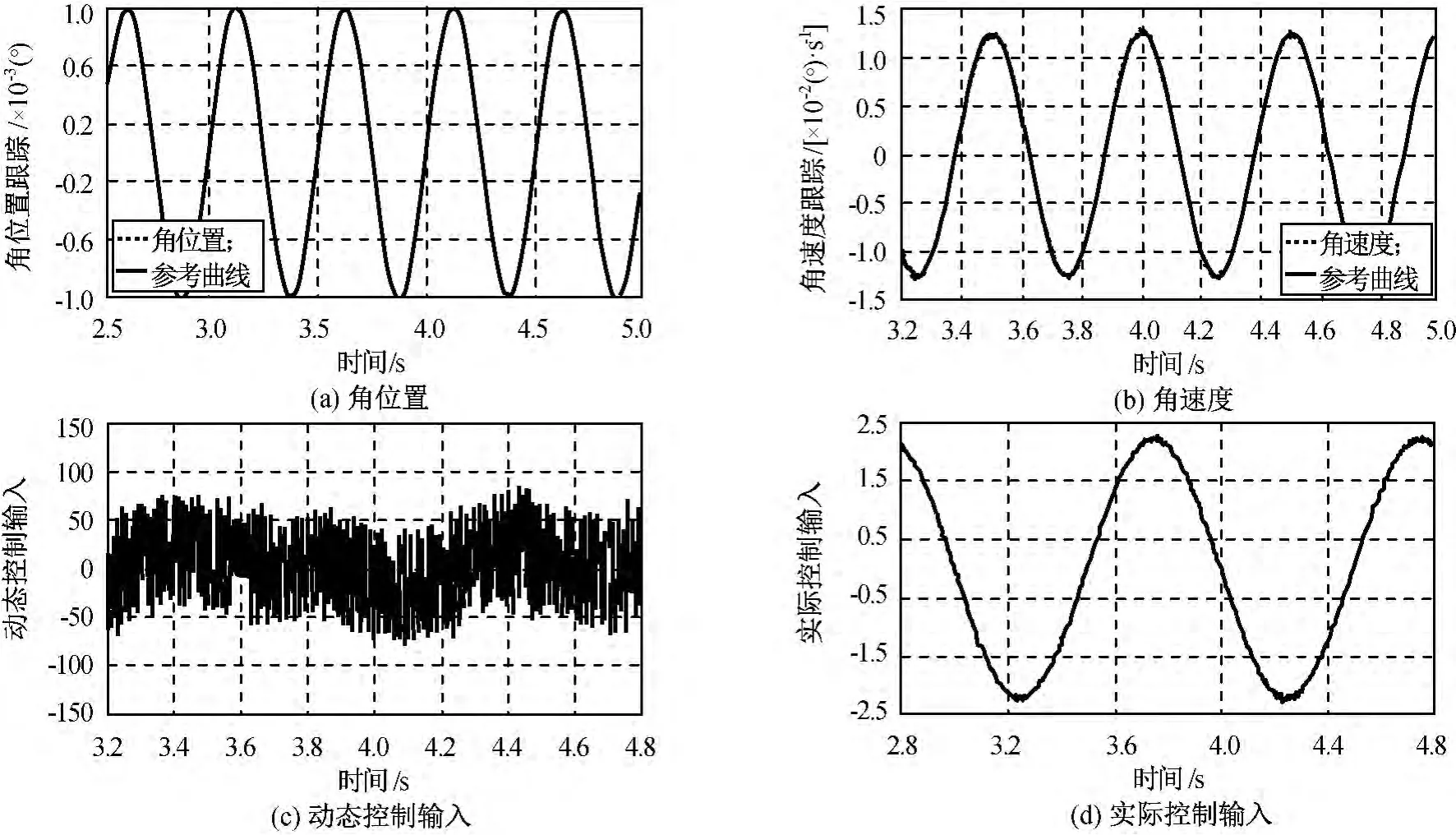
图3 DSMC跟踪结果Fig.3 Tracing result of DSMC
比较图2、3可知:采用DSMC,角度输出和角速度输出能更好地跟踪相应的参考输入曲线,表明DSMC能更有效抑制干扰力矩,鲁棒性更强。由图3(c)、(d)可知:动态控制输入信号u·抖动较大,其中包含很多不连续信号,经将系统控制输入的一阶导数引入切换函数,得到的实际系统控制输入信号,实现了在时间上本质连续的动态滑模控制律,有效降低了抖振。
为进一步证明DSMC削弱抖振的作用,采用基于指数趋近律的传统滑模控制(SMC),并用极点配置法求切换函数,控制器参数:ε=0.1,k=20,c1=6,c2=0.1[4]。仿真结果如图4、5所示。
比较图3(b)、图4(b)可知:DSMC的角速度跟踪曲线的抖振程度稍小。比较图3(d)、图5可知:SMC的控制输入抖动严重,而DSMC则明显更好,进一步证明了DSMC的优越性。
4 结束语
针对转台控制系统中的各种不确定因素的影响,如高频力矩干扰,为提高系统的鲁棒性,本文采用动态滑模控制方法,根据滑模控制理论并进行MATLAB仿真,结果表明,与传统双闭环PID控制相比,DSMC具有更强的鲁棒性。与传统滑模控制(SMC)相比,DSMC有更平滑更连续的控制输入,并在一定程度上削弱抖振。
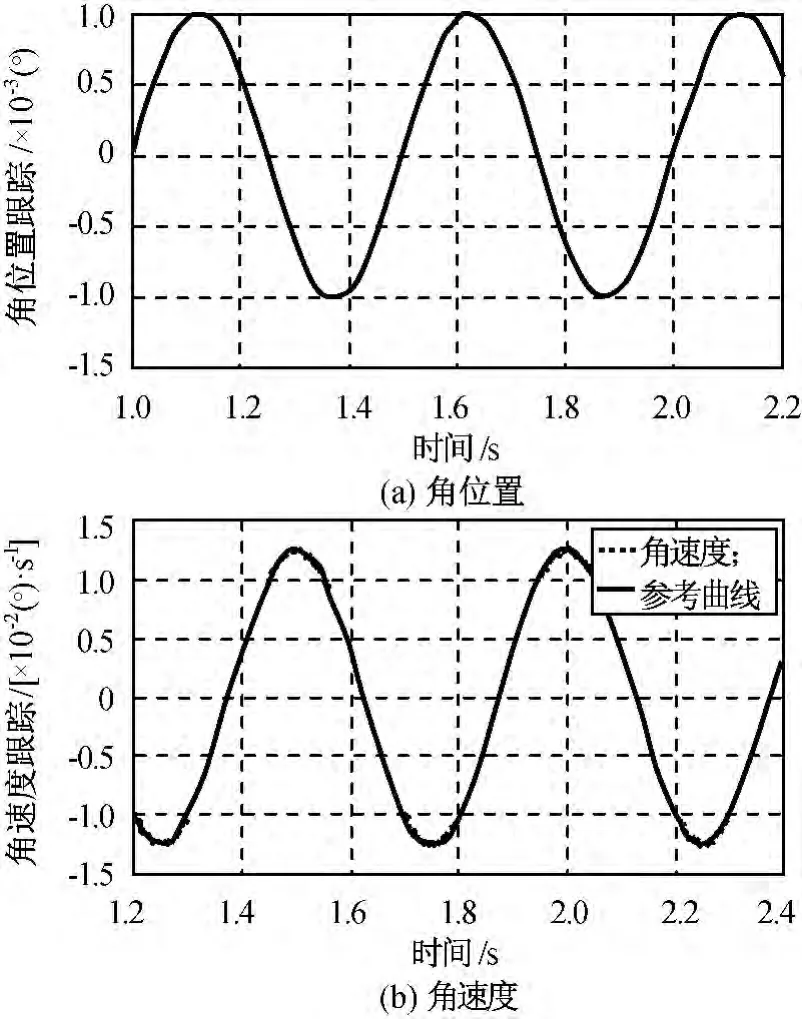
图4 SMC跟踪结果Fig.4 Tracing result of SMC
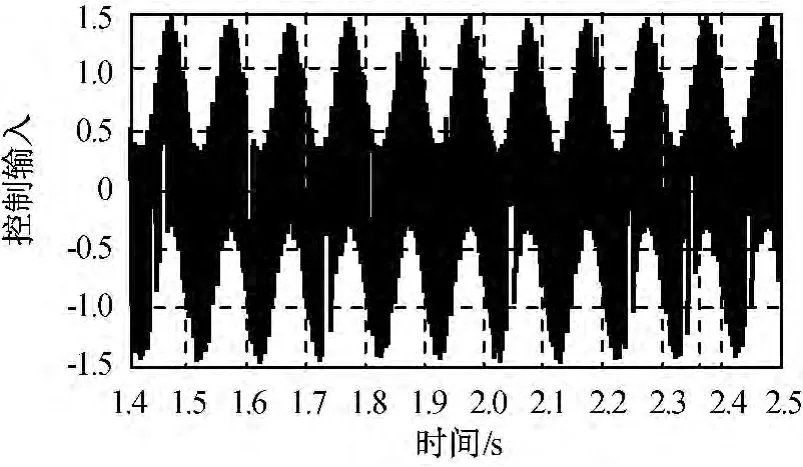
图5 SMC控制输入信号Fig.5 Input signal of SMC control
[1] 刘金琨.滑模变结构控制 MATLAB仿真[M].北京:清华大学出版社,2005.
[2] PIEPER J.First order dynamic sliding mode control[C]// Proceedings of the 37thIEEE Conference on Decision & Control.Tampa:IEEE,1998:2415-2420.
[3] RAMIREZ H S,SANTIAGO O L.Adaptive dynamic sliding mode control via backstepping[C]//Proceedings of the 32thIEEE Conference on Decision &Control.San Antonia:IEEE,1992:1422-1427.
[4] 胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
大电机技术(2022年2期)2022-06-05
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
北京航空航天大学学报(2017年4期)2017-11-23
电脑知识与技术(2016年28期)2016-12-21
北京航空航天大学学报(2016年7期)2016-11-16
科技视界(2016年16期)2016-06-29
航天制造技术(2016年6期)2016-05-09
