
基于自混合干涉的齿轮箱故障诊断技术
2015-12-30 05:14姜春雷,韩加明
中国机械工程 2015年19期
基于自混合干涉的齿轮箱故障诊断技术
姜春雷韩加明
东北石油大学,大庆,163318
摘要:将激光自混合干涉(SMI)技术用于齿轮箱的故障检测,设计出一种新的齿轮箱故障检测传感器。采用QL65D5SA型半导体激光自混合传感器、冯哈勃2342l012CR空心杯减速电机自带的行星齿轮箱,搭建了行星齿轮箱故障SMI检测系统,并对行星轮Z1做断齿故障实验。通过对时域波形的分析,可以找到额定转频下的12个冲击点;通过对齿轮箱故障信号傅里叶频谱的分析,发现故障齿轮的啮合频率周围出现与故障齿轮特征频率和行星架转频呈整数倍关系的边带,且啮合频率处的波形幅值明显增大,这些都与齿轮副的理论振动模型相符合。
关键词:自混合干涉;故障检测;传感器;齿轮箱;冲击点;傅里叶频谱;边带
中图分类号:TH132.41
收稿日期:2015-01-19
基金项目:黑龙江省自然科学基金资助项目(E201332)
作者简介:姜春雷,男,1977年生。东北石油大学电气信息工程学院副教授。主要研究方向为激光光电检测、振动测量。发表论文10余篇。韩加明(通信作者),男,1988年生。东北石油大学电气信息工程学院硕士研究生。
Gearbox Fault Diagnosis Technology Based on Mixed Interference
Jiang ChunleiHan Jiaming
Northeast Petroleum University,Daqing,Heilongjiang,163318
Abstract:Through the applications of laser SMI in the detection of gearbox, a new fault detection sensor for gearbox was proposed herein. A planetary gearbox fault SMI detection system was built by semiconductor laser self-mixing sensor QL65D5SA and planetary gearbox of hollow cup motor Faulhaber 2342l012CR. And the system was applied to do the wheel breaking tooth fault experiments for the planet Z1. Through the analyses of the time-domain waveform, 12 shock points were found at the rated frequency. Through the analyses of the Fourier spectrum of gearbox fault signals, it can be found that there are sidebands around the meshing frequency of the fault gear, which is an integer multiple of the characteristic frequency of the fault gear and the planetary frame transfer frequency. Amplitude of the wave at the meshing frequency is obviously increased, which is in accordance with the theoretical vibration model of gear pair.
Key words: self-mixing interference(SMI); fault detection; sensor; gearbox; shock point; Fourier spectrum; sideband
0引言
行星齿轮箱具有体积小、重量轻、转速比高、传动比大、承载能力强、传动效率高等诸多优点,广泛用于风力发电、航空航天、船舶机械、冶金制造、石油化工、矿业开采、起重运输等行业的机械传动系统。由于行星齿轮箱多工作在低速重载的恶劣环境下,所以太阳轮、行星轮、内齿圈等关键部件的严重磨损和疲劳点蚀等故障时有发生,有时甚至会发生断齿现象。作为机械传动的重要部件,行星齿轮箱中的某个部件一旦出现故障,就可能发生连锁反应,导致整个传动系统的停机,造成巨大的经济损失[1]。因此准确对行星齿轮箱故障进行检测,把握故障的发生、发展,对提高生产效率等方面具有现实意义。
目前在齿轮箱故障信号采集方面,主要使用加速度传感器对振动信号进行测量,当前最常见的加速度传感器为压电式传感器、电容式传感器、压阻式传感器。压电式传感器尽管能够满足应用要求,但具有机械结构复杂、寿命较短、成本较高、体积较大等不足,限制了其在智能化装备的进一步应用。电容式传感器的温度特性好、分辨率高,但其结构复杂并受到固有频率的限制,仅适用于低频微弱加速度信号的检测。压阻式传感器具有体积小、功耗小、可靠性高、精度高等优点,但其固有频率与测量灵敏度之间存在制约关系,极大限制了其使用范围[2]。加速度传感器均采用接触测量方式,直接吸附于齿轮箱表面,具有一定的质量负荷。大多数的测量旨在量化结构的振动,因此任何振动结果的改变都会导致振动测量结果的不精确[3]。
针对以上问题,本文采用一种基于激光自混合干涉技术的光电式传感器采集行星齿轮箱的振动信息。该传感器采用非接触测量方式,理论上不会给被测物体带来表面损伤和测量误差,具有分辨率高、抗干扰能力强、温度特性好、体积小、结构简单紧凑等特点,并且可使用价格低、寿命较长的半导体激光器[4]。
本文对齿轮箱正常状态和故障状态时振动信号的时域波形进行了分析。当某一齿轮产生故障时,时域波形中干涉条纹数目的变化频率与故障齿轮转频的数值相等,可依此识别故障特征。分别对正常状态和故障状态的振动信号做了FFT频谱分析,在频谱上观察以啮合频率为中心的调制边带特征,计算调制频率,确定故障情况。
1理论基础
激光自混合干涉(self-mixing interference,SMI),是指激光器发出的光束一部分被外部振动物体反射或散射回激光器内腔后,携带物体的振动信息并与腔内初始光束发生相干混合,引起输出光束相位的变化,进而引起输出功率变化[5]。SMI技术已被证实可用于振动、位移等特征参数的测量[6-8]。
1.1自混合干涉理论模型[9-10]
当外腔长度小于激光相干长度的一半时,自混合干涉系统可用三镜腔模型来等效,如图1所示。

图1 SMI系统的三镜腔模型等效图
从A镜面开始,激光向右侧传播,并分为两束,其中一束在内腔AB间经历一次往返,另一束透过B镜面被物体M反射后,重新耦合到内腔AB。两束激光在A镜面处重新叠加,最终被光电二极管PD采集,待系统重新稳定后,叠加的波与初始波相位相同。M的靠近或远离改变了反馈光的相位,进而对初始波相位进行调制,引起输出功率的变化。自混合干涉系统的相位方程如下:
x0(t)=xF(t)+Csin(xF(t)+arctanα)
(1)
(2)
式中,D(t)为外腔长,即自混合传感器与被测物体之间的距离;x0(t)为无光反馈时外腔的相位;xF(t)为有光反馈时外腔的相位;λ0(t)、λF(t)分别为x0(t)和xF(t)的波长函数;C为光反馈系数;α为激光器的线宽展宽因子。
激光器输出的功率方程为
P=P0(1+mcos(xF(t)))
(3)
式中,P0为无光反馈时的初始光功率;m为激光器调制系数,一般取10-3。
式(2)中,无光反馈时外腔的相位x0(t)可由外腔长D(t)来表示;当M移动时,外腔长D(t)发生改变,初始光相位x0(t)随之改变,引起xF(t)的变化,最终导致激光器输出功率P发生波动,通过检测PD两端的电压变化,即可采集到物体M的振动信息。
单位周期内,一个干涉条纹代表物体移动半个波长的距离,通过记录条纹的数目,可测量物体位移。当反馈程度达到一定时,SMI信号波形是一个左右倾斜、类正弦波形,倾斜的方向与物体的位移方向相同。因此可以通过SMI信号波形条纹的倾斜方向来辨别物体的位移方向[11]。图2所示为物体位移曲线和C=0.7时激光器输出功率波形。

(a)物体位移曲线
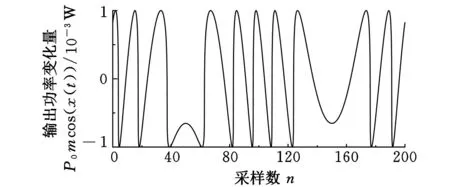
(b)输出功率波形(C=0.7) 图2 激光自混合干涉振动信号仿真图
1.2齿轮副振动信号模型
齿轮副的工作条件决定了其振动信号是调幅、调频同时存在的混合调制信号,啮合振动是其最主要的表现形式。齿轮的制造和安装误差、运转过程中齿轮刚度的周期性变化以及齿轮发生故障时产生的调制脉冲,使得齿轮的啮合振动主要表现为以齿轮转频为载频的调制现象[12]。故障齿轮的振动信号可以表示为
(4)
(5)
式中,ak(t)、bk(t)分别为调频和调幅函数;fz为齿轮副的啮合频率;gk(t)为啮合频率附近的边带信号;fr1、fr2分别为故障齿轮与啮合齿轮的转频。
对式(4)作FFT得到x(t)的频谱:
(7)
gk(t)的频谱为
(8)
r=1,2q∈Z

(9)
式中,Ck,r,q为ak(t)exp(jbk(t))的FFT系数。
因此,齿轮某阶啮合频率附近的边带信号是以该啮合频率为中心,其边带间距为两个齿轮副轴频的线性叠加。将式(8)带入式(7),最终得到齿轮副振动信号x(t)的幅值谱X(f)。当齿轮发生故障时,齿轮副的啮合条件发生改变,引起啮合振动的加剧,表现为边带能量的增加。
2系统设计
图3为半导体激光自混合传感器故障检测系统装置示意图,实物如图4所示,齿轮箱为冯哈勃2342l012CR空心杯减速电机自带齿轮箱(行星齿轮箱),电机空载转频130Hz,额定输出转频2Hz,减速比为64∶1,箱体内各太阳轮和行星轮的齿数均为18,齿圈齿数为54,在故障齿轮水平方向距离最近的箱体表面上粘贴一个反光性能良好的金属薄片。光源采用QL65D5SA型半导体激光二极管(内部封装发光二极管LD及光电二极管PD),其波长为650nm,最大输出功率为5mW,额定电流25mA,光源驱动为ThorlabsLD1255R型精密恒流驱动器,LD1255R型具有低电流噪声、低温度漂移等优点。数据采集卡采用16路模拟输入的NIUSB-6341型采集卡。

图3 激光自混合传感器故障检测系统
实验中,设定半导体激光器的驱动电流为1.1倍的阈值电流,激光器通过LD1255R驱动后,发出一束激光,经透镜准直后照射到齿轮箱的金属薄片上,被金属薄片反射回激光器内腔,与初始光束耦合后引起了输出光功率的变化,并由PD转化为电信号,这时通过信号采集卡采集PD两端的电压,即可实时监测齿轮箱的振动状态。

图4 行星齿轮箱故障检测系统实物图
3实验与分析
实验中对行星轮Z1做断齿故障,如图5所示。在减速齿轮箱额定输出转速情况下进行故障诊断实验。采样频率为16 384Hz,采样数为16 384,采集无故障、断齿故障两种情况下齿轮箱的振动波形。

图5 行星轮Z 1断齿故障实物图
3.1无故障状态
3.1.1时域部分
图6所示的时域波形中,因为行星轮既围绕太阳轮公转又围绕自身轴心自转,所以行星轮齿轮箱运行时所产生的振动信号非常复杂。时域波形中,各相邻周期内的干涉条纹数目大致相同,无周期性变化,表明齿轮箱无明显故障。
3.1.2频谱部分
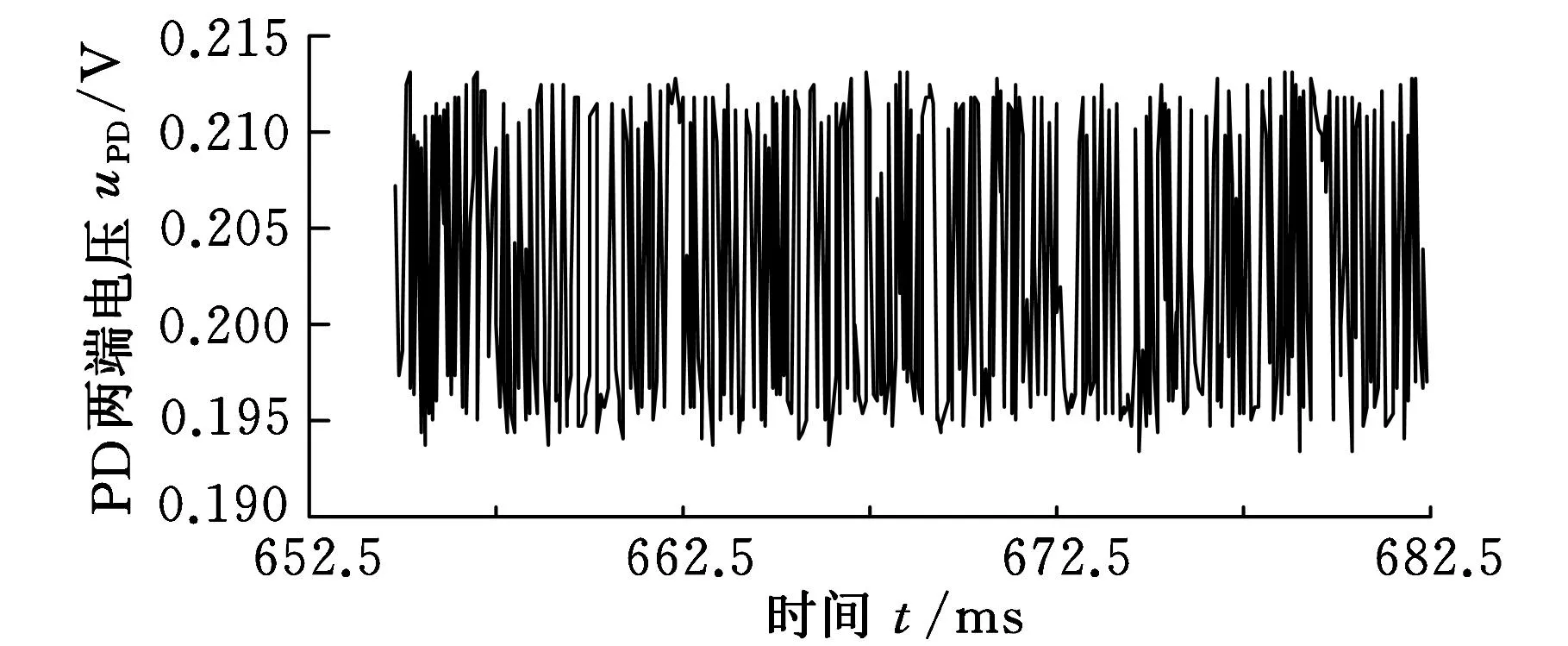
(a)时域波形局部放大图

(b)FFT频谱 图6 无故障齿轮箱的SMI振动信号
在FFT频谱(图6)中,2Hz、8Hz和32Hz分别为输出轴、太阳轮Z2和Z3的基频,主导频率为齿轮Z1的转频和啮合频率,在齿轮Z1的啮合频率fm1周围,边带出现在频率为fm1±nfc(n=1,2,…,5)的位置处,边带间隔为故障齿轮Z1的行星架转频fc=2Hz。主导边带fm1-fc、fm1+2fc、fm1+5fc(分别为142Hz、148Hz、154Hz)峰值频率之间相差3fc,这是由行星架的调节作用所引起的[13-15]。
3.2行星轮Z1断齿故障
每当齿轮与缺陷处下一个轮齿啮合时,便会产生一次周期性的碰撞冲击。这种周期性的冲击脉冲会调制故障齿轮的啮合频率,因而啮合频率左右两侧便会形成很多具有一定幅值且分布均匀的边带,同时啮合频率处的波形幅值会大幅增加。
3.2.1时域部分
当啮合到齿轮断齿处时,类似于齿轮的振动波形受到了一个短时脉冲的调制,调制脉冲的时间与故障齿轮的啮合周期Tm1=1/fm1相同。由图3可知,故障齿轮Z1既和太阳轮Z2啮合,又和齿圈啮合,当Z1自转一圈时,便产生2个短时脉冲冲击。齿轮Z1齿数为18,齿圈齿数为54,Z1绕齿圈公转一圈,便会产生6个短时脉冲冲击。因此,当齿轮箱输出额定转频2Hz时,每秒就会产生12次短时脉冲冲击。从图7可以看到,1.1085s时,左右方向倾斜的条纹明显出现减少。从1.1050s开始,波形条纹由向左倾斜转为向右倾斜,说明振动方向已经改变,但条纹目急剧减少,表明已啮合到故障齿轮缺陷处;到达峰值点后,波形向左倾斜,振动方向改变,条纹数目大致相同。此过程相当于齿轮的振动受到一个短脉冲的调制,调制脉冲长度为6.9ms。之后经过一个谷值点,条纹向右倾斜,振动方向再一次改变,并且条纹急剧增多,表明已啮合到故障齿轮缺陷处的下一个轮齿,产生了一个碰撞冲击。

图7 时域波形局部放大图
经过对时域波形的仔细分析,单位时间内明显产生了12个具有一定周期性的冲击点,图8~图19为12个冲击点局部放大图。冲击脉冲周期为83.3ms。调制脉冲及12个周期性冲击点的确定符合断齿故障的特征[16]。
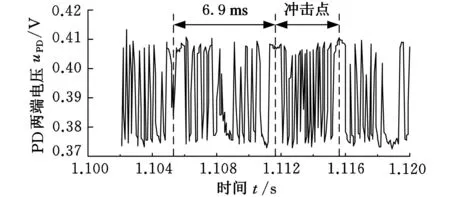
图8 冲击点1

图9 冲击点2
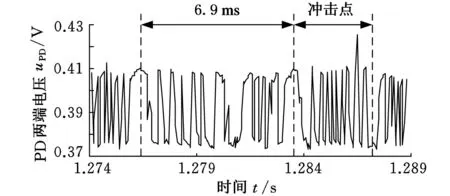
图10 冲击点3
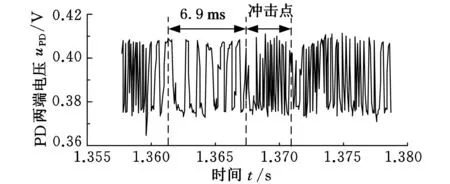
图11 冲击点4
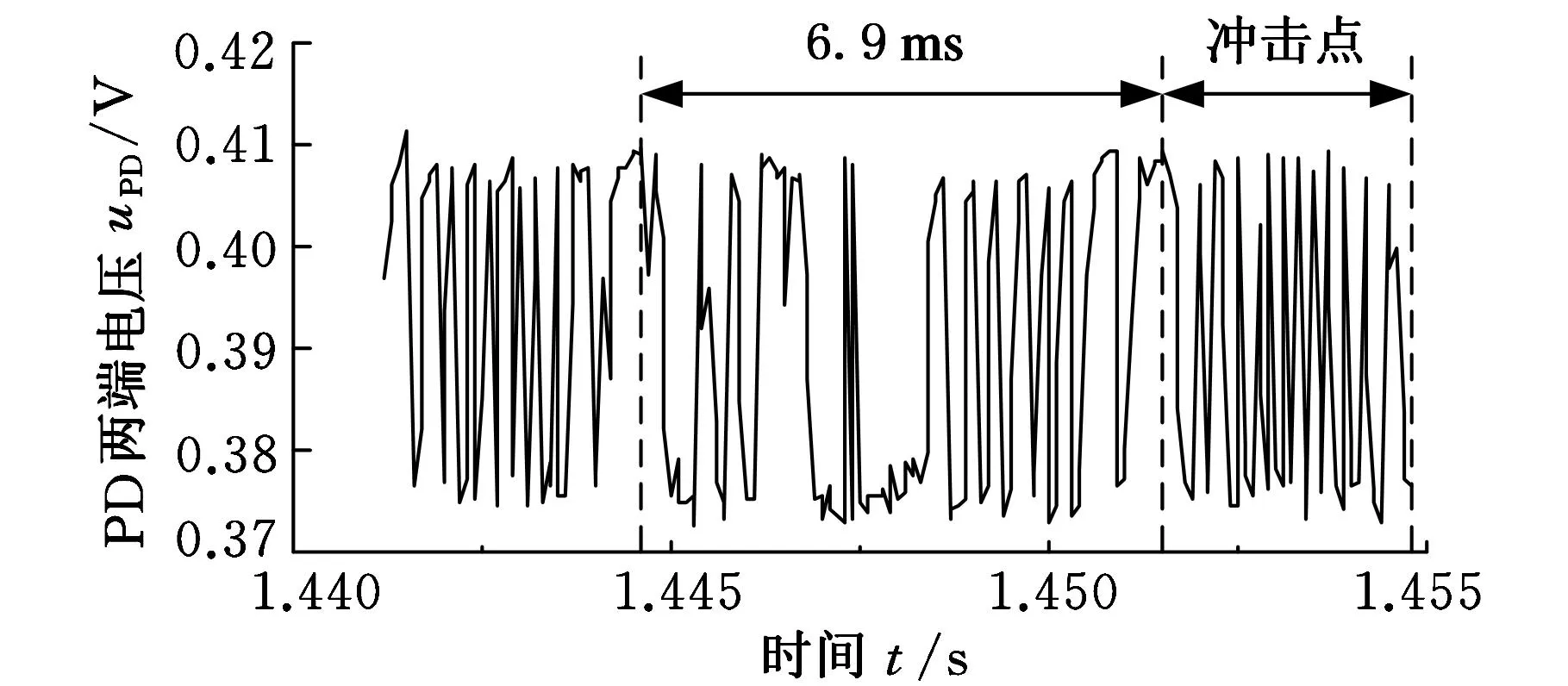
图12 冲击点5
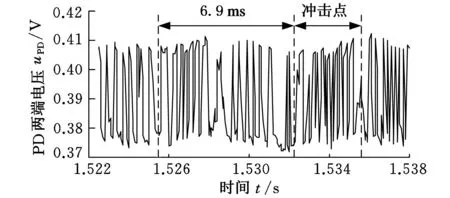
图13 冲击点6

图14 冲击点7

图15 冲击点8
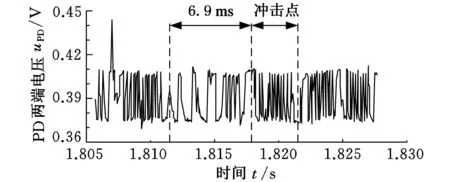
图16 冲击点9
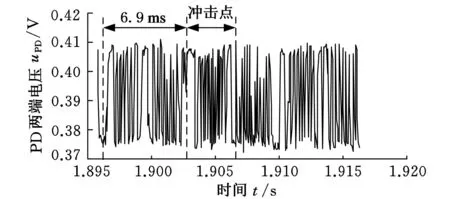
图17 冲击点10
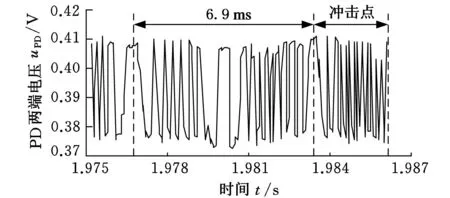
图18 冲击点11
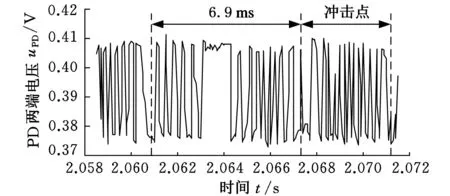
图19 冲击点12
3.2.2频谱部分
若将故障行星轮Z1对齿圈和太阳轮Z2的冲击视为2个独立的冲击,则齿轮Z1的故障特征频率fZ1=fm1/z1p即为故障特征的载频(经计算为8Hz),其中,fm1为Z1齿轮的啮合频率,z1p为Z1齿轮齿数。故障齿轮工作时会造成行星架载荷的不均匀分配,使得频率为fZ1±kfc处和高次谐波nfZ1处峰值增大。如图20所示,频率3fZ1+2fc、7fZ1+2fc、9fZ1+fc、10fZ1、12fZ1-fc、12fZ1、12fZ1+fc(分别为28Hz、60Hz、74Hz、80Hz、94Hz、96Hz、98Hz)处的峰值都大于正常信号。在频率为fm1±kfc+nfZ1的位置处出现一系列边带,这些边带与行星轮Z1的故障特征频率fZ1和Z1所在行星架的旋转频率fc有关。如 fm1+fc-2fZ1、fm1+3fc-2fZ1、fm1+fc-fZ1、fm1+2fc+4fZ1、fm1+3fc+6fZ1(分别对应130Hz、134Hz、138Hz、180Hz、198Hz)均出现了明显的边带成分。图20中,144Hz是故障齿轮Z1在额定转速下的啮合频率,108Hz是齿圈相对额定转速下的啮合频率,啮合频率下的幅值远大于其他各频率点幅值,这些都符合行星轮断齿的故障特征。
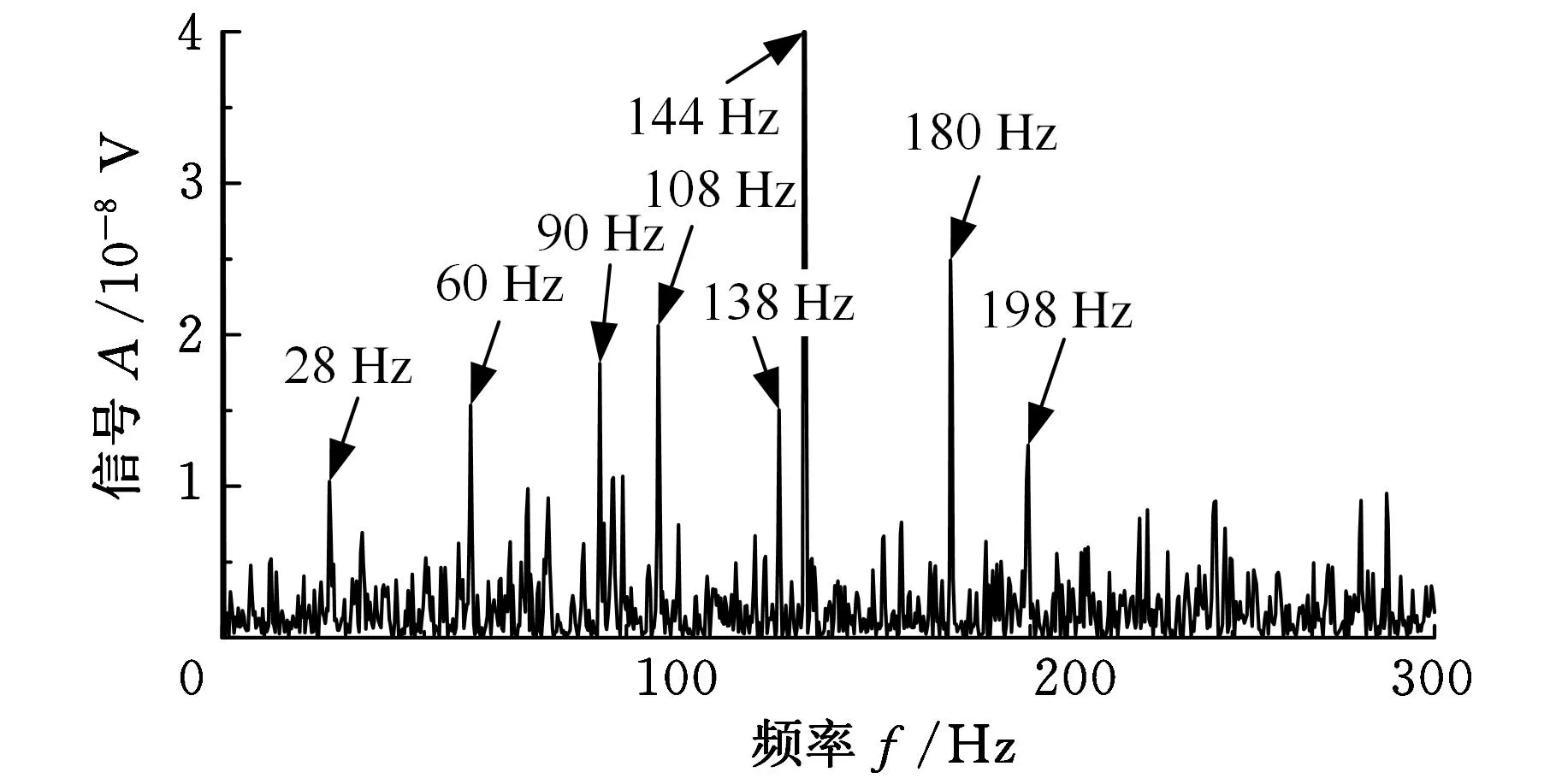
图20 行星轮Z 1断齿故障FFT频谱
4结语
本文将激光自混合干涉传感器成功用于齿轮箱的故障检测,介绍了系统结构及工作原理,建立了齿轮副振动信号模型。实验中,当齿轮发生断齿故障时,调制脉冲引起啮合频率的幅值和边带能量的增加,同时在边带成分中可提取出故障齿轮Z1的故障特征频率和轴频成分,这些均与断齿故障特征相符合。从断齿故障振动波形的时域图中,观察到12个具有相当周期性的振动冲击点,进一步明确了齿轮的故障类型。下一步将分别从径向和轴向采集行星齿轮箱故障信号,研究不同转速情况下复合调制信号对自混合干涉波形的影响,选用倒频谱分析方法对故障特征边带进行提取,进一步确定故障发生点和故障类型。
参考文献:
[1]雷亚国,何正嘉,林京,等. 行星齿轮箱故障诊断技术的研究进展[J].机械工程学报, 2011,47(19):59-67.
Lei Yaguo, He Zhengjia, Lin Jing, et al. Research Advances of Fault Diagnosis Technique for Planetary Gearboxes[J]. Journal of Mechanical Engineering, 2011, 47(19): 59-67.
[2]赵玉龙,刘岩,孙禄,等.孔缝双桥结构高性能压阻式加速度传感器[J].机械工程学报,2013,49(6): 198-204.
Zhao Yulong, Liu Yan, Sun Lu, et al. Double Slot Structure and High Performance Piezoresistive Acceleration Sensor[J]. Journal of Mechanical Engineering, 2013, 49(6): 198-204.
[3]董高庆.压电加速度计的原理、结构及其使用[J].测试技术学报,1997,11(4):52-62.
Dong Gaoqing. The Piezoelectric Accelerometer’s Principle, Structure and Its Use[J]. Journal of Test and Measurement Techol., 1997,11(4): 52-62.
[4]黄贞.基于半导体激光自混合干涉的振动测量研究与应用[D].哈尔滨:哈尔滨工业大学,2014.
[5]Bes C,Plantier G,Bosch T. Displacement Measurements Using a Self-mixing Laser Diode under Moderate Feedback[J]. IEEE Trans. Instrum. Meas.,2006,55(4):1101-1105.
[6]Scalise L,Yu Yanguang,Giuliani G,et al. Self-mixing Laser Diode Velocimetry:Application to Vibration and Velocity Measurement[J]. IEEE Trans. Instrum. Meas.,2004,53(1):223-232.
[7]Giuliani G,Norgia M,Donati S,et al. Laser Diode Selfmixing Technique for Sensing Applications[J]. Opt. A: Pure Appl. Opt., 2002,4(6):283-294.
[8]Donati S,Giuliani G,Merlo S. Laser Diode Feedback Interferometer for Measurement of Displacements without Ambiguity[J]. IEEE Journal of Quantum Electronics,1995,31(1):113-119.
[9]Wang M. Fourier Transform Method for Self-mixing Interference Signal Analysis[J]. Optics & Laser Technology,2001,33(6):409-416.
[10]Plantier G,Bes C,Bosch T. Behavioral Model of a Self-Mixing Laser Diode Sensor[J]. IEEE Journal of Quantum Electronics,2005,41(9):1157-1167.
[11]郭冬梅.相位调制型激光自混合干涉测量微纳米技术的研究[D]. 南京:南京师范大学,2007.
[12]毕果,陈进. 基于谱相关的齿轮振动监测技术研究[J]. 振动与冲击,2009,28(7):17-21.
Bi Guo, Chen Jin. Research of Vibration Monitoring Technology for Gear Based on the Spectral Correlation[J].Journal of Vibration and Shock, 2009, 28(7): 17-21.
[13]冯志鹏,褚福磊. 行星齿轮箱齿轮分布式故障振动频谱特征[J]. 中国电机工程学报,2013,33(2):118-125.
Feng Zhipeng, Chu Fulei. Vibration Spectral Characteristics of Distributed Gear Fault of Planetary Gearboxes[J]. Proceedings of the CSEE,2013,33(2):118-125.
[14]冯志鹏,褚福磊. 行星齿轮箱故障诊断的频率解调分析方法[J]. 中国电机工程学报,2013,33(11):112-117.
Feng Zhipeng,Chu Fulei. Frequency Demodulation Analysis Method for Fault Diagnosis of Planetary Gearboxes[J]. Proceedings of the CSEE, 2013, 33(11): 112-117.
[15]冯志鹏,褚福磊.行星齿轮箱齿轮局部故障振动频谱特性[J]. 中国电机工程学报,2013,33(5): 119-127.
Feng Zhipeng, Zhao Leilei, Chu Fulei. Vibration Spectral Characteristics of Localized Gear Fault of Planetary Gearboxes[J]. Proceedings of the CSEE, 2013, 33(5): 119-127.
[16]Feng Z P,Zuo M J. Vibration Signal Models for Fault Diagnosis of Planetary Gearboxes[J]. Journal of Sound and Vibration,2012,331(22):4919-4939.
(编辑张洋)
猜你喜欢
山东冶金(2022年3期)2022-07-19
中国科技纵横(2019年2期)2019-03-25
制造技术与机床(2017年4期)2017-06-22
大陆桥视野·下(2017年2期)2017-03-30
科技视界(2016年21期)2016-10-17
企业导报(2016年13期)2016-07-19
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
风能(2016年12期)2016-02-25
科技资讯(2014年25期)2014-12-01
现代防御技术(2014年5期)2014-02-28
