
反舰导弹红外视景仿真
2015-12-22 11:03徐吉辉王文恽
海军航空大学学报 2015年5期
徐吉辉,王文恽,孙 媛
(海军航空工程学院科研部,山东烟台264001)
反舰导弹红外视景仿真
徐吉辉,王文恽,孙 媛
(海军航空工程学院科研部,山东烟台264001)
随着反舰导弹武器系统的快速发展,舰船反导拦截系统迫切需要对其进行追踪与防御。而作为近程防御探测设备,红外探测器需要为拦截系统提供目标指示。研究了反舰导弹的红外视景仿真,使用Creator软件完成对导弹弹体的几何建模;使用Vega Prime软件完成视景配置;通过C++语言应用程序接口API调用ACF文件完成红外图像的生成;构建了导弹飞行驱动模块、尾焰模块、红外图像生成模块和气象仿真模块,并生成了典型导弹攻击航路的红外图像序列,为目标指示、识别和跟踪提供了仿真技术思路,在红外视景仿真开发实现上具有一定实用性。
反舰导弹;视景仿真;Creator;Vega Prime
虚拟现实(Virtual Reality)是用计算机生成逼真的三维世界,人作为参与者通过适当装置对虚拟世界进行体验和交互[1]。视景仿真作为虚拟现实的一个重要表现形式,在军事、教学、科研、娱乐等许多领域都得到广泛应用。特别是在军事领域,比如导弹试验发射,要耗费大量资金,并且有危险性、强噪音等不利因素,采用视景仿真的模拟系统可以提供一个经济、安全、逼真的环境。
随着计算机技术的发展,视景仿真软件开发平台日益完善,虚拟现实技术也随之日益成熟。本文以反舰导弹为对象,对海天环境下反舰导弹进行了红外视景仿真,并生成了典型导弹攻击航路的红外图像序列。
1 导弹三维建模
Creator是实时三维数据库建模软件,生成实时的OpenFlight数据格式,具有强大的多边形建模、矢量建模、地形精确生成等功能[2]。
在利用Creator建模时,需要确定导弹的物理结构并制作纹理。一般来说,飞行状态的导弹可见的基本结构包括:弹头、弹身、尾喷口、侧翼、尾翼等。对于导弹的构造,首先根据导弹结构数据,设置弹头顶点、侧翼顶点、尾翼顶点等特征点为放样点,在边沿特征线处勾画放样线,在弹身不同部位的垂直横截面处创建与其形状一致的放样面;然后,在根据不同部位放样点、线、面归属不同的Object结点,放样点、线、面的层次结构;接着就是利用Creator的Loft工具[3],将每个Object结点中的放样点、线、面,根据其实际的形体结构,放样为导弹的不同的位置。此外,还将用到LOD、DOF等技术。图1为基于Creator的反舰导弹三维建模效果。

图1 反舰导弹三维建模效果图Fig.1 Three-dimensional modeling of anti-ship missile
OpenFlight是实时视景仿真领域三维模型数据库,它是一个分层的数据结构,采用几何层次结构和节点属性来描述三维物体。OpenFlight API是一套用于读写OpenFlight模型的应用程序接口,它可以为Creator开发插件,用于增强Creator的功能或扩展OpenFlight格式;也可以集成到独立应用程序,完成诸如OpenFlight模型建模、格式转换等工作[4]。本文利用OpenFlight API开发一个Creator扩展插件,使Creator能够生成一个新的红外信息存储节点IRnode,并在该节点存储相应的红外参数。
2 视景场景的生成
在Lynx Prime配置完成生成ACF文件后,就可以将其以三维场景的方式显示出来,但此时场景中的任意三维模型都是静态的或只能按事先规划好的方式以动态形式呈现的,使用者不能与之交互。因此,在完成三维视景配置之后还需要完成视景仿真的环境设计工作,通过视景仿真的环境设计,可以达到满足要求的各种感官效果以及用户与虚拟视景的交互[5]。
三维视景仿真包括4大模块:①导弹飞行驱动模块;②尾焰仿真模块;③红外图像生成模块;④气象仿真模块等。通过这4个模块组成的仿真可以提供给用户一个具有较强真实感的可交互的三维虚拟视景。
2.1 导弹飞行驱动模块
导弹飞行的实现主要是通过弹道模型解算空间位置和姿态,然后控制模型在虚拟场景中的六自由度运动。其主要实现函数是setTranslate和setRotate,分别表示对象沿XYZ轴的平移和旋转。

图2 Vega Prime坐标系统Fig.2 Coordinates of VegaPrime
Vega Prime中默认的视点是沿着Y轴正方向的,将导弹三维模型加到虚拟场景中,弹头方向指向+Y。其中,+X指向右,+Y指向前,+Z指向上;+H指看向左旋转,+P指向上旋转,+R指运动转向右边旋转,负向与正向相反。
2.2 尾焰仿真模块
导弹飞行过程中发动机尾焰的模拟是生成导弹红外图像过程中十分重要的方面。本文采用粒子系统来实现对导弹尾焰羽流的模拟。
Vega Prime具有功能强大的粒子系统,能够实现碰撞爆炸、导弹发动机尾喷焰和尾迹等多种特效,但是需要设置较为复杂的控制参数,不易掌握。因为导弹尾焰的运动方向一直沿着导弹纵轴方向,所以可以通过导弹的姿态角,间接地计算导弹尾焰粒子系统各轴线上的速度分量,由此控制尾焰粒子的运动方向。关键程序代码如下:


在设计粒子系统的过程中,选择合理的粒子属性,采用合理的数据结构对尾焰模拟的效果起着至关重要的作用。影响尾焰效果的属性有很多,例如空间位置、速度、颜色、尺寸、透明度等[6]。
粒子系统用以下公式来定义参数:
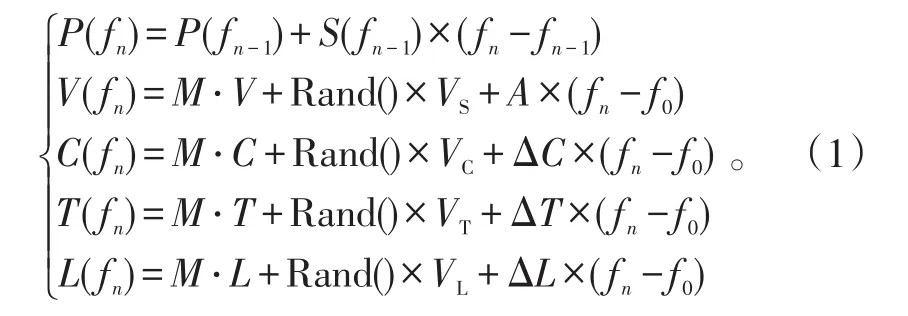
式(1)中:n为当前帧数;P(fn)、V(fn)、C(fn)、T(fn)和L(fn)分别为粒子的当前位置、运动速度、颜色、透明度和生命周期;M为惯性权重,是常数;V、C、T和L分别为粒子的运动速度、颜色、透明度和生命周期的平均值;VS、VC、VT和VL分别为粒子的运动速度、颜色、透明度和生命周期的最大变化范围;Rand()为(0,1)上的随机数;A、ΔC、ΔT和ΔL分别为粒子的运动加速度、颜色的变化率、透明度的变化率和生命周期的变化率,可定义为常数。
随着粒子系统时间的变化,当粒子的生命值减为零时,认为其消亡。以下3种情况可认为粒子消亡:
1)粒子运动使其空间位置超出预设的图像区域或显示范围;
2)粒子的颜色低于某一规定值;
3)粒子的透明度为0。
在粒子绘制时,使用多边形面片同时贴上纹理来代替点粒子,这样可以大大减少粒子数量,同时使用动态贴图技术,使尾焰的纹理贴图和纹理坐标随时间和空间的变化而改变,这样便可以提高系统的性能。
2.3 红外图像生成模块
红外图像生成模块是本文重要的一个模块,其功能是利用视景生成目标的红外图像序列,该仿真模块的建模流程图如图3所示。
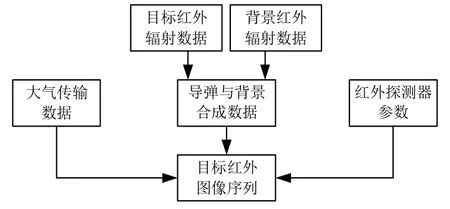
图3 红外仿真模块建模流程图Fig.3 Flow chart of infrared simulation module’s modeling
考虑到大多数情况下模型的某一部分具有相同的红外特性,比如导弹的蒙皮,虽然可能在某一瞬间蒙皮各处的温度并不相同,但几秒后就基本可以达到热量平衡,所以可以假设蒙皮具有相同的红外特性。此处通过扩展OpenFlight模型格式生成的新节点IRnode存储所有子节点的红外属性,该节点可以作为Group、Object类型节点的父节点,这样就可以将蒙皮所在的Group或Object对象作为IRnode的子节点,可以在数据字典中定义父子关系,其代码如下:

IRnode的层次关系如图4所示。
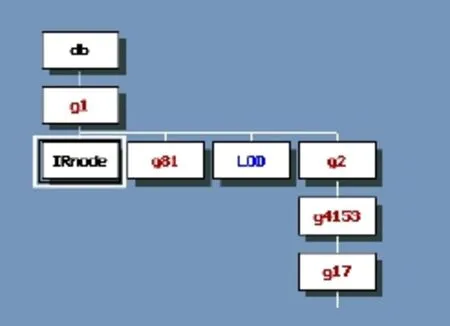
图4 IRnode节点属性Fig.4 Attribute of IRnode
模型的各节点红外属性在仿真中可以通用Open-Fight API获取,也可以使用Vega Prime的回调函数获取。同时,还需运用后处理技术为红外仿真视景加入了噪声模型、运动模糊和传感器效应等效果。
为了获得更加逼真的仿真效果,必须加入传感器效应,模拟传感器平台抖动、噪声、运动模糊、光晕效果等。传感器噪声的实现可以通过添加噪声纹理,在片段着色器中以一定方式访问该纹理,并叠加到最终图像上。运动模糊的实现一般采用在一个单独的路径中渲染场景,或使用多渲染对象,然后将速度信息输出到某一渲染对象中,以生成一个逐像素的速度缓存;另一种实现运动模糊的技术是将深度缓存当作一个纹理输入到一个片段着色器中,以生成场景的速度图;片段着色器使用深度值计算每个片段的世界坐标,并通过前一帧的观察投影矩阵进行变换,便可计算出当前帧和前一帧在视图位置的差别,以生成逐像素速度值。
2.4 气象仿真模块
考虑到导弹能够在不同天气中飞行,那么观测设备有很大的可能在复杂的天气情况下工作。同样,视景仿真需要模拟出多种环境下导弹的飞行。模块给出了3种天气情况:多云、晴朗和阴雨,其中默认的天气情况是多云。
在Vega Prime中,太阳、月亮、天空和云层等共同组成了天气环境。其中天空和云层的纹理可以根据动态改变。这样,可以通过变换天空和云层的纹理来达到改变天气的目的,通过函数setTextureFile(const char*name)来加载天气状况的纹理。
此外,使用vpEnvRain类和vpEnvSnow类来实现雨雪天气的效果[7]。雨雪天气实际上使用的Vega Prime内置的粒子系统。阴雨天气的仿真效果如图5所示。
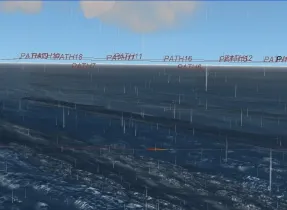
图5 阴雨天气仿真效果图Fig.5 Simulation of raining weather
3 仿真结果
仿真采用中纬度夏季大气模式,时间参数设置为中午12点,得到的弹体红外热像图如图6所示。

图6 弹体红外仿真图Fig.6 Infrared simulation of missile’s body
从对象弹弹体红外仿真图可以清楚地观察到发动机、尾喷口附近的红外辐射明显强于蒙皮的红外辐射,结果符合实际情况。
图7中,从上至下分别为导弹8~12 μm波段和3~5 μm波段红外仿真图,可见3~5 μm波段的红外仿真图更明亮,这是因为在温度相同条件下,该波段导弹尾焰的红外辐射强度的值更大。将模型计算所得参数用于尾焰红外图像的生成,可以看到尾焰的初始段和过渡段的界限,但是过渡段与基本段的界限则模糊不可见。由于3~5 μm波段图像显示更明显,后面的仿真都利用该波段。
图7 导弹尾焰双波段红外仿真图Fig.7 Two wave band infrared simulation of missile’s Trail
接着,在海洋环境下生成导弹的红外图像,得到导弹的红外视景图像,如图8所示。

图8 导弹红外视景仿真图Fig.8 Infrared simulation of missile
然后,对飞行中的导弹进行仿真,生成图像序列。仿真实验共生成导弹3条攻击航路的红外图像序列。1号攻击航路:导弹沿着与舰艇的连线,直接对靶舰进行攻击。2号攻击航路:导弹沿着直线,对靶舰进行有航路捷径的攻击。3号攻击航路:导弹对靶舰进行有运动过载、无航路捷径的攻击。假设当导弹离靶舰4km处时,红外探测器方能探测到目标。
为更清楚地了解各红外图像序列表示的含义,画出节点示意图如图9所示。

图9 攻击航路节点示意图Fig.9 Diagram of attack route’s node
图10 ~12分别为1~3号攻击航路的导弹红外图像序列,像元总数384×288,像元尺寸为5 μm×25 μm,波段为3~5 μm,视场为15×9°。
仿真时,采用电子行业协会(EIA)RS-170隔行扫描规程,使屏幕得到每秒60次的刷新速率。为便于显示,利于观察,本文分别给出3条攻击航路下距离靶舰4km、3km、2km、1km、500 m和100 m的导弹红外图像序列,一一对应于仿真图10~12中的各小图。其中,由2号攻击航路生成的图像序列还存在后向观测的情况,因而给出图11 c)500 m情况的红外图像。
图10 1号攻击航路的红外图像序列Fig.10 Diagram list of No.1Attack route’s infrared
图10 是1号攻击航路的红外图像序列,由于图10 a)~f)中的目标过小,不使用标记。在此攻击航路下,红外探测器显示的图像中导弹的蒙皮面积占很大的比重,尾焰的可见部分非常少。以图10 f)为例,标记到导弹弹体的距离在0~6个像元之间。
图11是2号攻击航路的红外图像序列。在此攻击航路下,红外探测器显示的图像中导弹尾焰的可见部分越来越大。图11 a)中标记到导弹弹体的距离在13~17个像元之间,图11 b)中标记到导弹弹体的距离在71~84个像元之间。
图11 2号攻击航路的红外图像序列Fig.11 Diagram list of No.2 attack route’s infrared
图12 是3号攻击航路的红外图像序列。图12 b)中标记到导弹弹体的距离在0~6个像元之间。
图12 3号攻击航路的红外图像序列Fig.12 Diagram list of No.3Attack route’s infrared
2号攻击航路带有航路捷径,对于红外探测器而言,该航路具有特殊性。特别是当弹舰距离接近航路捷径时,红外图像中标记处与导弹弹体之间的距离很大,由于红外图像的标记处于弹体与尾焰的中心位置,如果探测器将这一点作为目标点发送给综合控制台,那么此时红外探测器的水平探测误差角会很大。图13所示水平探测误差角与导弹舰艇之间距离的关系。图13中横轴-500表示2号攻击航路的节点为(g),可以查出对应的水平探测误差角约为0.6°。

图13 2号攻击航路下红外探测器水平误差角Fig.13 Horizontal error angel of infrared sensor in No.2 attack route
从图13中不难看出,红外探测器的水平误差角的大小随着弹舰距离的缩短呈指数型上升,仿真结果显示:最大的水平探测误差角为2.86°,此时弹舰距离等于航路捷径。
4 结论
本文采用三维建模软件和视景仿真软件对反舰导弹的红外视景仿真进行了研究,重点阐述了基于Creator软件的弹体三维建模和导弹飞行驱动模块、尾焰模块、红外图像生成模块和气象仿真模块的视景生成原理,并生成了典型导弹攻击航路的红外图像序列,形成了不同航路下的仿真结果。本文的研究成果为红外成像设备对目标探测识别的视景仿真提供了一种技术思路,具有一定的通用性和实用性。
[1]ZOU XIANGJUN,SUN JIAN.The development and prospects of virtual reality[J].Journal of System Simulation,2004,16(9):1905-1909.
[2]PRESAGIS USA INC.Creator 4.2 user manual[K].Texas:Presagis USAInc,2011:79.
[3]丁梦雨,芦利斌,金国栋.基于MFC和Vega Prime的无人机三维视景仿真实现[J].现代计算机,2013(8):86-87. DING MENGYU,LU LIBIN,JIN GUODONG.Implementation of three-dimensional visual UAV simulation based on MFC and Vega Prime[J].Modern Computer,2013(8):86-87.(in Chinese)
[4] PRESAGIS USA INC.Open flight API reference[K]. V4.2.Texas:Presagis USAInc.,2011:9.
[5]孔中武,石林锁,王涛.基于Creator和Vega Prime的导弹飞行视景仿真系统设计与实现[J].四川兵工学报,2014,35(10):111-113. KONG ZHONGWU,SHI LINSUO,WANG TAO.Design and implementation of missile flight scene simulation based on creator and Vega Prime[J].Journal of Sichuan Ordnance,2014,35(10):111-113.(in Chinese)
[6]王平,陈智刚,郭光全,等.基于Vega的爆炸毁伤视景仿真技术研究[J].爆破器材,2013,42(4):29-30. WANG PING,CHEN ZHIGANG,GUO GUANGQUAN,et al.Research on visual simulation of explosion and damage based on Vega[J].Explosive Materials,2013,42(4):29-30.(in Chinese)
[7]PRESAGIS USA INC.Vegaprime programmer’s guide [K].V4.1.Texas:Presagis USAInc.,2010:298-299.
Infrared Visual Simulation of Anti-Ship Missile
XU Jihui,WANG Wenyun,SUN Yuan
(Department of Scientific Research,NAAU,Yantai Shandong 264001,China)
With the rapid development of anti-ship missile weapon system in each country,anti-missile interceptor sys⁃tem has an urgent need for tracing and defensing against the missile.And as a short-range defense detection equipment, infrared detection equipment need to provide target designation for the interceptor system.The infrared visual simulation of anti-ship missile was researched and the Creator was used to achieve geometrical modeling of the guided missile body. The Vega Prime was used to accomplish visual configuration.The ACF files was called through C++language application programmers interface to complete the generation of infrared image.Missile flight drive module,plume module,infrared image generation module,auxiliary module was established.Infrared image sequences for typical missile attack routes were generated and provided the idea of simulation technology for the target designation,identification and track.The pa⁃per had practicability for development of Infrared visual simulation.
anti-ship missile;visual simulation;Creator;Vega Prime
TJ761
A
1673-1522(2015)05-0473-06
10.7682/j.issn.1673-1522.2015.05.015
2015-04-30;
2015-07-25
徐吉辉(1963-),男,副研究员,硕士。
猜你喜欢
环球时报(2022-05-23)2022-05-23
计算机仿真(2022年1期)2022-03-01
金桥(2021年4期)2021-05-21
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
火力与指挥控制(2020年2期)2020-04-02
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
弹道学报(2018年4期)2019-01-05
