
基于导航雷达实测数据的CFAR检测算法分析
2015-12-22 11:03董云龙杨立永
海军航空大学学报 2015年5期
董云龙,杨立永
(1.海军航空工程学院信息融合研究所,山东烟台264001;2.91336部队,河北秦皇岛066326)
基于导航雷达实测数据的CFAR检测算法分析
董云龙1,杨立永2
(1.海军航空工程学院信息融合研究所,山东烟台264001;2.91336部队,河北秦皇岛066326)
为提高导航雷达在复杂环境中的目标检测能力,研究了修正中值(MMD)检测器在导航雷达中的应用,并与经典非参量广义符号(GS)检测器和参量最小选择(SO)检测器的检测结果进行对比。仿真结果表明:GS检测器对海上单一目标有较好的检测性能,但是在多目标环境下的检测性能严重下降;SO检测器虽然对上述环境有较好的检测性能,但是由于杂波包络分布类型难以准确已知,杂波抑制能力较差;MMD检测器在多目标环境下有较好的检测性能和杂波抑制能力。
多目标环境;海杂波;非参量检测
对海杂波的研究迄今已经有半个多世纪的历史,目前已有的海杂波分布类型主要有对数正态(Lognormal)分布、韦布尔(Weibull)分布、K分布等随机模型[1]。但这些模型都是基于假设杂波在时间上是一个平稳随机过程,只是在特定条件下对实际海杂波的一种近似。由于海杂波较为复杂且是时变的,用一种分布类型精确拟合海杂波往往是非常困难的。
近些年来,非参量检测方法受到越来越广泛的关注[2-8],这主要是因为相比于参量检测方法,非参量检测方法不需要精确已知杂波分布类型,因而在杂波分布统计特性未知的情况下,有更好地保持恒虚警的能力。非参量检测器主要有单样本非参量检测器和两样本非参量检测器[9]。相比于单样本非参量检测器,两样本非参量检测器因不需要杂波中值的统计特性(往往难以准确已知)而受到广泛关注,其中比较经典的就是广义符号(GS)检测器。GS检测器要求当目标不存在时,目标距离单元与参考单元是同分布的。但在大多数的情况下,目标往往处于杂波边缘或多目标环境中。在上述情况下,GS检测器的假设条件难以满足,从而导致检测性能下降。
针对上述问题,E K.AL-HUSSAINI提出了修正中值(MMD)检测器[10],该检测器在GS检测器的基础上,将每次扫描周期中检测单元中秩值大于N/2的情况相加形成检验统计量。本文利用实测海杂波数据对该检测器进行分析,并与非参量GS检测器和参量SO检测器的处理结果进行对比。
1 检测器结构
1.1 非参量检测器结构
图1为两样本非参量检测器的结构原理图。

图1 两样本非参量CFAR检测器处理流程Fig1 Processing flow of two-sample nonparametric detector
图1中,N表示一个处理间隔内的脉冲周期数;M表示一个脉冲重复周期内的采样数;yk(k=1,2,…,N)表示检测单元观测值,xki(i=1,2,…,M)表示每个重复周期内参考单元的纯杂波采样值,假定xki满足独立同分布,GS和MMD检测器的检验统计量被定义为[10]:

检验统计量d和门限K进行比较,如果d≥K则做出目标存在的判决。
1.2 参量检测器结构
参量CFAR中最具有代表意义的就是均值(Mean Level,ML)类CFAR检测方法,其中最小选择SO检测器就属于该类。该方案缓解了参考滑窗中出现多个空间近距离干扰目标引起的CA-CFAR检测器检测性能下降的问题,图2给出了SO检测器原理框图,其中xi(i=1,2,…,n)和 xj(j=1,2,…,n)表示两侧参考单元(也称作参考滑窗)采样,参考滑窗长度M=2n;n为前沿和后沿参考滑窗长度,X和Y分别是前沿和后沿滑窗中的局部估计,此时自适应判决准则为[9]:

式(3)中:H1为有目标假设;H0为无目标假设;Z是杂波功率水平估计,代表参考滑窗中的平均杂波包络估计;T是标称化因子;D表示检测单元中的检测统计量。与检测单元邻近的是2个保护单元,主要用于单目标情况,防止目标能量泄漏到参考单元影响CFAR检测器的检测性能。
式(5)中,Pfa为虚警概率。

图2 SO检测器处理流程Fig.2 Processing flow of SO detector
2 实测数据验证
本文所用实测数据为某型导航雷达对实验船和海上浮标的观测结果。图3以PPI(Plan-Position Indicator)显示的形式给出了该批数据雷达视频回放结果,横纵坐标的0点代表雷达的中心位置,图右侧的竖直颜色条上的刻度值代表采样点的回波强度由弱到强变化。图3中标识出了实验船只和浮标的位置以及海岸等地物回波的信息,其中,图3给出2批渔船目标的雷达回波在距离向上刚好分开的数据,另外在近区场存在一个浮漂目标。因此,上述数据可以用来分析多目标环境下和海上单一目标的检测性能。
图4~6分别给出了GS、SO和MMD检测器在虚警概率Pfa=10-4,参考单元个数M=64,脉冲积累数为N=10的条件下对图3所示视频数据的处理结果,具体分析如下。

图3 雷达原始视频数据处理结果Fig3 Result of radar original video data
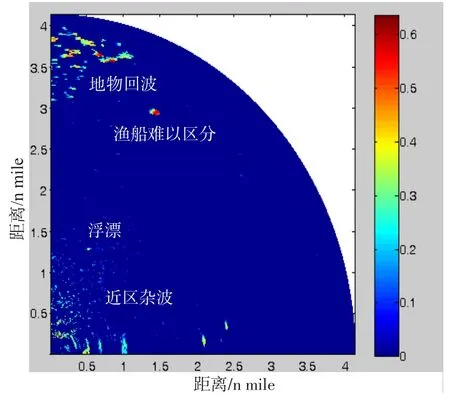
图4 GS检测器处理结果Fig4 Result of GS detector

图5 SO检测器处理结果Fig5 Result of SO-detector

图6 MMD检测器处理结果Fig6 Result of MMD-detector
第一,从杂波抑制的角度来看,相比于原始雷达视频数据回放结果,SO检测器虽然对杂波有一定的抑制作用但是抑制效果不明显,杂波剩余较多。这主要是因为海杂波分布类型难以准确已知,在进行参量检测时假设杂波包络的分布类型为高斯分布,而在实际检测过程中,由于实际的海杂波的分布类型与假设杂波分布类型不符,所以导致CFAR能力下降,画面出现较多杂波剩余。相比于参量检测器,非参量检测器的CFAR能力由于与杂波包络分布类型无关。因此,GS和MMD检测结果可以看出,杂波剩余较少。
第二,对于检测器参考单元中存在干扰目标的情况,从3个检测器对原始数据中2批在距离向上刚好分开的渔船目标数据分析来看,对于GS检测器,渔船1被严重削弱,完全被附近的渔船2目标湮没,造成漏警;而此时SO检测器检测到这2批近距离目标,且目标回波饱满清晰,不足之处就是周围海杂波干扰比较严重;MMD检测器成功的检测到这2批近距离目标,而且周围杂波抑制效果明显。分析原因主要如下:对于GS检测器来说,较强干扰渔船2出现在渔船1的后沿滑窗内,导致GS检测器要求目标不存在时,目标距离单元与参考单元对同分布的条件无法满足,因而检测性能下降。换言之,由于GS检测器是利用目标单元数据与周围参考单元数据比较而形成检验统计量的,这就要求渔船1数据在与周围的参考单元数据的比较过程中存在一定的优势,但是当参考单元滑窗内出现较强干扰渔船2时,这种优势严重下降,因而检测性能下降;SO检测器是利用检测单元前后沿滑窗中较小值作为目标单元杂波功率水平估计,在进行杂波功率水平估计的时候,由于渔船的2杂波功率水平较高,SO检测器选择了前沿滑窗进行杂波估计,因而成功检测到了渔船1,但是从图像可以看出SO检测器的杂波剩余较多;与GS检测器结构不同,MMD检测器在进行过门限检测时,首先设定一级门限N/2,这就滤除了渔船2在后沿的影响,从而检测性能提升,并且杂波剩余较少。从雷达显示画面来看,MMD检测器的检测效果最优,但是从MMD检测器的检测结果上看,渔船1还是有一定的削弱。
第三,对于海上单一目标的情况(图4~6中标注的近区场浮漂目标),3种检测器均成功地检测到该目标,但是从检测效果来说MMD和GS检测器的检测效果更优。这主要是因为从浮漂目标周围杂波来看,MMD检测器和GS检测器对目标周围的杂波抑制效果更为明显,因而浮漂目标更容易分辨。
3 结论
本文利用实测海杂波数据对MMD检测器进行了分析,并与经典参量SO检测器和非参量GS检测器进行了比较,并根据检测结果给出了相应的说明。结果表明:参量型SO检测器对多目标环境下的目标有相对较好的检测能力,但是由于实际海杂波背景的包络分布类型难以准确已知且是时变的,这导致参量检测器的所假设的杂波分布类型与实际情况不符,CFAR能力下降,从雷达显示画面看,主要体现在杂波抑制能力较差。GS检测器具有良好的杂波抑制能力,对海杂波中单一目标的检测性能也优于参量CFAR检测器,但是对多目标环境下,由于无法满足其假设条件,其目标检测能力严重下降,甚至会出现严重的漏警现象,影响对目标的有效探测。相比于前2种检测器,MMD检测器对多目标环境下的目标有相对较好的检测能力,并且有较好的杂波抑制能力,但是从雷达显示画面看,在多目标环境下该检测方法的目标仍有一定的削弱。针对上述问题,作者在今后的工作中将继续研究新的非参量检测算法以改进现有非参量检测算法在多目标环境中的检测性能,主要分析当参考单元前后沿均出现干扰目标,杂波边缘情况下的目标非参量检测方法。
[1]赵海云,张瑞永,武楠,等.基于实测数据的海杂波特性分析[J].雷达科学与技术,2009,7(3):214-218. ZHAO HAIYUN,ZHANG RUIYONG,WU NAN,et al. Analysis of sea clutter characteristics based on measured data[J].Radar Science and Technology,2009,7(3):214-218.(in Chinese)
[2]HAO CHEN.Noise enhanced nonparametric detection[J]. IEEE Transactions on Information Theory,2009,55(2):499-506.
[3]SANZ GONZÁLEZ J L,ALVAREZ VAQUERO F.Nonparametric rank detectors under K distributed clutter in radar applications[J].IEEE Transactions on AES,2005,41(2):702-710.
[4]SEYFE B,SHARAFATA R.Nonparametric multiuser detection in non-Gaussian channels[J].IEEE Transactions on Signal Processing,2006,54(1):23-33.
[5]BROWN C L.A nonparametric approach to signal detection in impulsive interference[J].IEEE Transactions on Signal Processing,2000,48(9):2665-2669.
[6]孟祥伟.韦布尔杂波下非参数量化秩检测器的性能[J].电子学报,2009,37(9):2030-2034. MENG XIANGWEI.Performance of Rank Quantization(RQ)nonparametric detector in Weibull background[J]. Acta Electronic Sinica,2009,37(9):2030-2034.(in Chinese)
[7]金伟,刘向阳,许稼.K分布雷达杂波中两种非参量检测器性能分析[J].雷达科学与技术,2010,8(4):357-361. JIN WEI,LIU XIANGYANG,XU JIA.Performance analysis of two nonparametric detectors in K-distribution clutter[J].Radar Science and Technology,2010,8(4):357-361.(in Chinese)
[8]赵志坚,关键.海杂波中非参量恒虚警检测器性能分析[J].雷达科学与技术,2010,8(1):65-68. ZHAO ZHIJIAN,GUAN JIAN.Performance analysis of nonparametric CFAR detectors in sea clutter[J].Radar Science and Technology,2010,8(1):65-68.(in Chinese)
[9]何友,关键,孟祥伟,等.雷达自动检测与恒虚警处理[M].北京:清华大学出版社,1999:230. HE YOU,GUAN JIAN,MENG XIANGWEI,et al.Radar target detection and CFAR processing[M].Beijing:Tsinghua University Press,1999:230.(in Chinese)
[10]AL HUSSAINI E.Trimmed generalized and modified median detectors for multiple target situations[J].IEEE Transactions on Aerospace and Electronic Systems,1979,15:573-575.
Analysis of CFAR Detection Algorithm Based on Marine Radar Real Data
DONG Yunlong1,YANG Liyong2
(1.Institute of Information Fusion,NAAU,Yantai Shanong 264001,China; 2.The 91336thUnit of PLA,Qinhuangdao Hebei 066326,China)
The operational environment of marine radar is extremely complicated,In order to improve the target detection, the MMD nonparametric detector in multi-target environment was studied based on the real sea clutter data with unknown statistical propertied,and it was compared with generalized sign(GS)nonparametric detector and smallest of(SO)paramet⁃ric detector.The results show that,under the sea clutter the GS detector had a better performance in detecting a single tar⁃get,but degraded greatly in detecting targets in multi-target environment.The SO detector,although having a better detec⁃tion performance for the mentioned above environment,but had less ability of clutter suppression.The MMD detector had a better performance in detection and clutter suppression in multi-target environment.
multi-target environment;sea clutter;nonparametric detection
TN972
A
1673-1522(2015)05-0429-04
10.7682/j.issn.1673-1522.2015.05.006
2015-05-08;
2015-08-10
董云龙(1974-),男,副教授,博士。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
商品与质量(2020年18期)2020-11-27
火控雷达技术(2020年2期)2020-10-16
空间科学学报(2020年3期)2020-07-24
雷达与对抗(2020年1期)2020-06-05
现代职业教育·高职高专(2020年10期)2020-01-05
物理学报(2019年24期)2019-12-24
火力与指挥控制(2018年10期)2018-11-13
计算机应用(2016年10期)2017-05-12
