一类非线性二维自治系统的两个重合着的极限环
2015-12-21 06:23:23王晓静崔景安许传青
大学数学 2015年4期
王晓静, 崔景安, 叶 萌, 许传青
(北京建筑大学理学院数学系,北京100044)
一类非线性二维自治系统的两个重合着的极限环
王晓静,崔景安,叶萌,许传青
(北京建筑大学理学院数学系,北京100044)
[摘要]利用《微分积分法软件》和微分方程定性理论研究了一类二维非线性自治系统的动力学性质.探讨了五个平衡点的存在性、稳定性和极限集等一些几何性质,并通过描绘系统的图像解,得到两个重合的横置的葫芦形极限环.在解题的过程中首次发现了一个反常的现象:此系统所描述的周期性运动其周期的大小随自变量的微分的减小而增大.
[关键词]平衡点; 稳定性; 周期解; 极限环
1引言
常微分方程定性理论的基本思想是由方程直接研究和判断解的性质,它在常微分方程的研究中往往有其独到的功能[1].文献[2]中的微分积分法是以图像的方式给出微分方程的解,称作微分方程的图像解,图像解与数值计算中的数值解有着重大的区别.首先, 它们产生的条件不同.数值解的各种方法是在手算的基础上逐渐发展出来的, 因此离散点很少, 解的数量也很少,而图像解(即海量的数值解的可视性的表达方式)是在计算机问世之后产生的.其次,图像解能以动态的形式模拟出微分方程所描述的实际过程,这也是普通的数值解所不能办到的.
文献[3]是一本比较经典的教材,它既包括平面自治系统与稳定性理论,又系统阐述了常微分方程分支理论.在研究本教材116页的例5时,我们发现个有趣的现象:该二维非线性自治系统存在一个不通过原点(0,0)的周期解.下面利用文献[2]中的图像解来探讨例5[3],即如下非线性二维自治系统(1)的一些几何性质.
(1)
2模型的平衡点
O(0,0),A(1,0),B(-1,0),C(-1.3766,1.1028),D(1.3766,-1.10283).
证当y=0时,可由
(2)
直接求得平衡点O,A和B的坐标.
当y≠0时,平衡点C和D的坐标满足
(3)
此时,必然有

将y=-x(1-x2)2代入(3)的第一个方程并用Matlab可求得x=±1.3766,从而
y=∓1.1028,
即得平衡点C(-1.3766,1.1028)和D(1.3766,-1.10283),见下面的图1.
“无规矩不可成方圆”。党中央的“八项规定”“三严三实”及“自律准则”“处分条例”等就是最好的规矩。千里之堤毁于蚁穴,一些巨贪,往往就是从贪小便宜步步为“盈”“炼”成的。“易鱼”类似事件的严肃处理,体现的是“抓早抓小”,防微杜渐,以遏制由量变到质变。“好规矩”需善始善终,严要求产生好成效,严管理养成好习惯,严标准才能得民心。杜绝“易鱼”类似案例发生,打虎学武松拳头要硬的同时,拍蝇力度亦不能松。

图1 系统(1)的五个平衡点 图2 方程(4)的解图像
这里,关于y轴对称的两条曲线和直线y=0代表(2)中第一个方程的图形,另一条曲线代表(2)中第二个方程的图形,三条曲线的五个交点即为系统(1)的五个平衡点.
注由Matlab[4]可画出方程
(4)
的解图像如图2.将方程(4)的左边沿着系统(1)求导得
图3 系统(1)的图像解
因此(4)表示的闭曲线经过原点且满足系统(1)的方程.
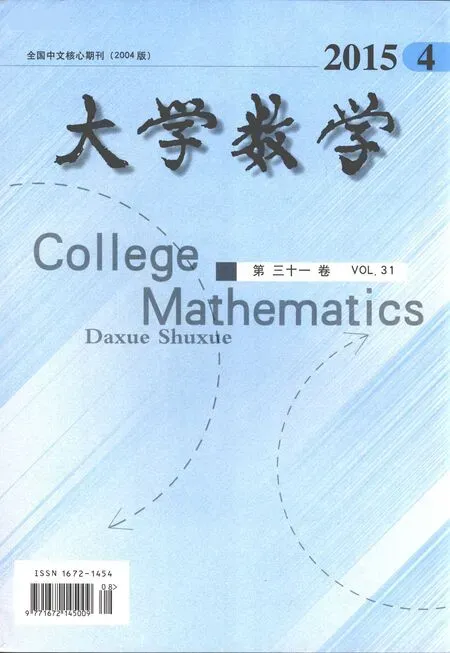
利用文献[2]中的微分积分法可得系统(1)的图像解(图3):
由系统(1)的图像解可知,平衡点A和B为不稳定的焦点,平衡点O,C和D为不稳定的鞍点,利用微分方程定性理论给出如下证明.
定理2系统(1)五个平衡点中的A(1,0)与B(-1,0)是不稳定的焦点,O(0,0),C(-1.3766,1.1028)和D(1.3766,-1.10283)都是鞍点.
证系统(1)的特征矩阵是

(5)
把平衡点O(0,0)的值代入特征矩阵(5)中得
其特征方程和特征根分别为
|λI-J(O)|=λ2-1,λ1,2=±1,
所以平衡点O(0,0)是鞍点.
把平衡点A(1,0)与B(-1,0)的值代入特征矩阵(5)中得

其特征方程和特征根分别为

所以平衡点A(1,0)与B(-1,0)是不稳定的焦点.
把平衡点C(-1.3766,1.1028)和D(1.3766,-1.10283)的值代入特征矩阵(5)中得

其特征方程和特征根分别为

显然λ1,2是异号的两个实根,所以C(-1.3766,1.1028)和D(1.3766,-1.10283)都是鞍点.
3两个重合着的极限环
从图3可以看出系统(1)围绕着不稳定的焦点A(1,0)与B(-1,0)各存在一个稳定的极限环.这两个极限环的大小形状及转向均相同,是两个完全重合着的横置的葫芦形极限环,为一、一结构.该极限环并不是图2中的封闭曲线,但是系统(1)的经过有解区域里的初值点的一切轨线的ω极限集,而点A和B分别是起点在图2中的封闭曲线内的右半和左半轨线的α极限集.

图4(a) 图4(b) 图4(c)

利用文献[2]中的微分积分法可画出系统(1)当n=1000和n=10000两组图像解,见下图5和图6.其中n表示积分单位的等分数,n增加一个数量级,用来描绘图形的离散点数就扩大十倍,得到的解的准确位数就提高一位.

图5 n=1000时系统(1)的周期解图像

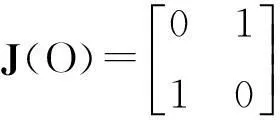
图6 n=10000时系统(1)的周期解图像

其中tx和ty分别表示该曲线与其前一个峰、谷值之间的时间间隔.图5和图6中的峰、谷值高的曲线代表x(t)的解相图,峰、谷值低的曲线代表y(t)的解相图.数据中可以发现当n=1000时,得到周期为19.6的解,当n=10000时,得到周期为24.22的解.
类似的方法,我们可以得到当n=105,106,107时其周期分别为28.82,33.42和38.02.
在确定周期运动的峰值、谷值之准确位数时,发现其运动周期是随自变量的微分dt的减小而增大(见表1中周期T的数据),这是一个反常的现象,一般周期性运动的周期是不随dt变化的,若知道此微分方程组的来源及其相关的背景材料,或许可以得到满意的答复.另外,在解题过程中曾多次降低对自变量的微分dt的数量级的计算,是为了观察d值及运动周期T的变化,同时也从中获知:

.

4结论
利用文献[2]求解微分方程的通用方法-微分积分法给出了系统(1)的图像解,找到了经典教材[3]中没有提到的两个鞍点,并且由于这两个不稳定的平衡点的存在,系统(1)出现了图3左右两边的无解区.进而结合相图说明了系统(1)存在两个完全重合着的极限环,此种情况并不多见,并且发现运动周期T随自变量的微分dt的变化而发生改变.
我们还利用Matlab[4]进行了数值模拟,当选取Reltol和Abstol的精度控制从10-11到10-12到10-13,对应的运动周期变化为55, 58, 63, 结果与本文的基本一致.并在精度相同的条件下通过改变初值来计算运动周期,结果表明不同初值并未对周期产生显著影响,因此我们推断精度是导致周期变化的主要原因.
[参考文献]
[1]张芷芬,丁同仁,黄文灶,董镇喜.微分方程定性理论[M]. 北京:科学出版社,2006.
[2]张渭曾,刘耀荣. 用《微分积分法》解黎卡提方程(附《微积分积分法》的简介)[C]∥数学·力学·物理·高新技术研究进展—中国数学力学物理学高新技术交叉研究会第8届学术研讨会论文集, 2000, 8:64-68.
[3]张锦炎,冯贝叶. 常微分方程几何理论与分支问题[M]. 第2次修订本. 北京:北京大学出版社,2005:116-117.
[4]刘浩,韩晶.MatlabR2012a完全自学一本通[M]. 北京:电子工业出版社,2013.
TwoDuplicateLimitsCyclesofaKindofNonlinear
Two-DimensionAutonomousSystem
WANG Xiao-jing,CUI Jing-an,YE Meng,XU Chuan-qing
(SchoolofScience,BeijingUniversityofCivilEngineeringandArchitecture,Beijing100044,China)
Abstract:Thedynamicpropertiesofaclassofnonlineartwo-dimensionautonomoussystemareinvestigatedbasedonthedifferentialandintegralmethodandthequalitativetheoryofdifferentialequations.Theexistenceandstabilityoffiveequilibria,limitsetsandsomeothergeometricpropertiesareobtained.Fromtheimagesolution,wegettwoduplicatelimitcycleswithtransversegourdshaped.Anabnormalphenomenonwasfirstdiscoveredintheprocessofstudying:theperiodoftheperiodicmotionincreasesasthederivativeoftheindependentvariabledecreases.
Keywords:equilibrium;stability;periodicsolution;limitcycle
[基金项目]国家自然科学基金资助项目(10461006,11261037); 内蒙古师范大学“十百千”人才培养工程资助项目(RCPY-2-2012-K-033)
[收稿日期]2015-04-02
[中图分类号]O175
[文献标识码]A
[文章编号]1672-1454(2015)04-0064-06
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:01:16
石油沥青(2021年4期)2021-10-14 08:50:44
烟台果树(2019年1期)2019-01-28 09:34:58
传媒评论(2018年7期)2018-09-18 03:45:52
数学物理学报(2018年1期)2018-03-26 08:16:44
传媒评论(2018年11期)2018-02-16 07:31:52
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
深空探测学报(2015年3期)2015-12-07 11:14:57
IT时代周刊(2015年7期)2015-11-11 05:49:56
散文百家(2014年11期)2014-08-21 07:16:58