
浅谈“电机与拖动”课程教学
2015-09-09 06:11岳舟谭甲凡刘永贵
电脑知识与技术 2015年16期
岳舟 谭甲凡 刘永贵
摘要:“电机与拖动”是自动化专业一门重要的专业基础课,同时该课程又是后续课程“运动控制系统”的基础,在专业课程体系中占有很重要的地位。针对“电机与拖动”课程难教难学的特点,结合教学工作实践,分享几点教学体会,希望能对进一步提高“电机与拖动”课堂教学质量,营造良好的课堂氛围起到一定的指导作用。
关键词:电机与拖动;教学;体会
中图分类号:G64 文献标识码:A 文章编号:1009-3044(2015)03-0176-02
Discussion of “Motor and Drive” Course Teaching
YUE Zhou, TAN Jia-fan, LIU Yong-gui
(Department of Energy, Mechanical and Electrical Engineering, Hunan University of Humanities, Science and Technology, Loudi 417001, China)
Abstract: “Motor and Drive” is a professional automation an important specialized fundamental course, and the course is to follow a course of motion control system based, in the professional curriculum system occupies very important position. According to the characteristics of “Motor and Drive” course is hard to teach and study, combined with teaching practice, share some teaching experience, hoping to further improve the “Motor and Drive” classroom teaching quality, to create a good atmosphere in the classroom play a guiding role.
Key words: motor and drive; teaching; experience
“电机与拖动”是自动化、电气工程及自动化等专业的重压专业基础课,该课程与这些专业的多门后续课程,如“电力电子技术”、“运动控制系统”等密切相关[1]。同时,该课程的教学内容也是这些专业的学生在今后的工作中从事各种自动控制的必备基础[2]。因此,本课程在这些专业的教学计划中具有非常重要的地位。
笔者在硕士阶段一直从事电机专业的学习和研究,毕业后又一直担任我校自动化专业的“电机与拖动”的课程教学工作,对本课程的教学特点有一定的了解。以下是笔者就本课程的教学内容提出个人的思考和看法,希望能对本课程的教学起到一定的作用。
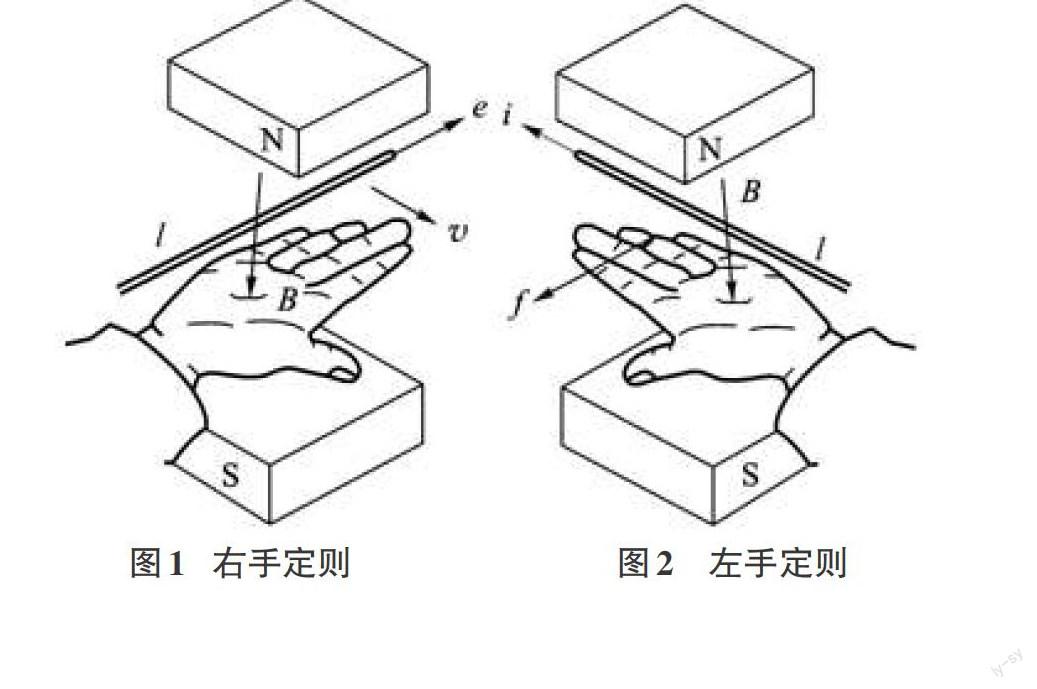
1 手脑并用,做到“左右逢源”
“左”就是左手定则,“右”就是右手定则。所谓逢“源”就是用右手定则确定电源,即感应电动势的方向;用左手定则确定动力源,即电磁力和电磁转矩的方向。右手用于发电机,而左手用于电动机,分别如图1和图2所示[3]。
其产生的感应电动势和电磁力的大小分别为
[e=blv] (1)
[f=bli] (2)
左手定则和右手定则动作简单,但容易混淆,容易出错。对学生而言,动作要领是:手心正对N极。掌握了动作要领,学生在课堂上运用左手定则、右手定则时就会得心应手,真正做到“左右逢源”。具体应用实例如图3和图4所示,这也就是直流电动机和直流发电机的工作原理[4]。
图1 右手定则 图2 左手定则
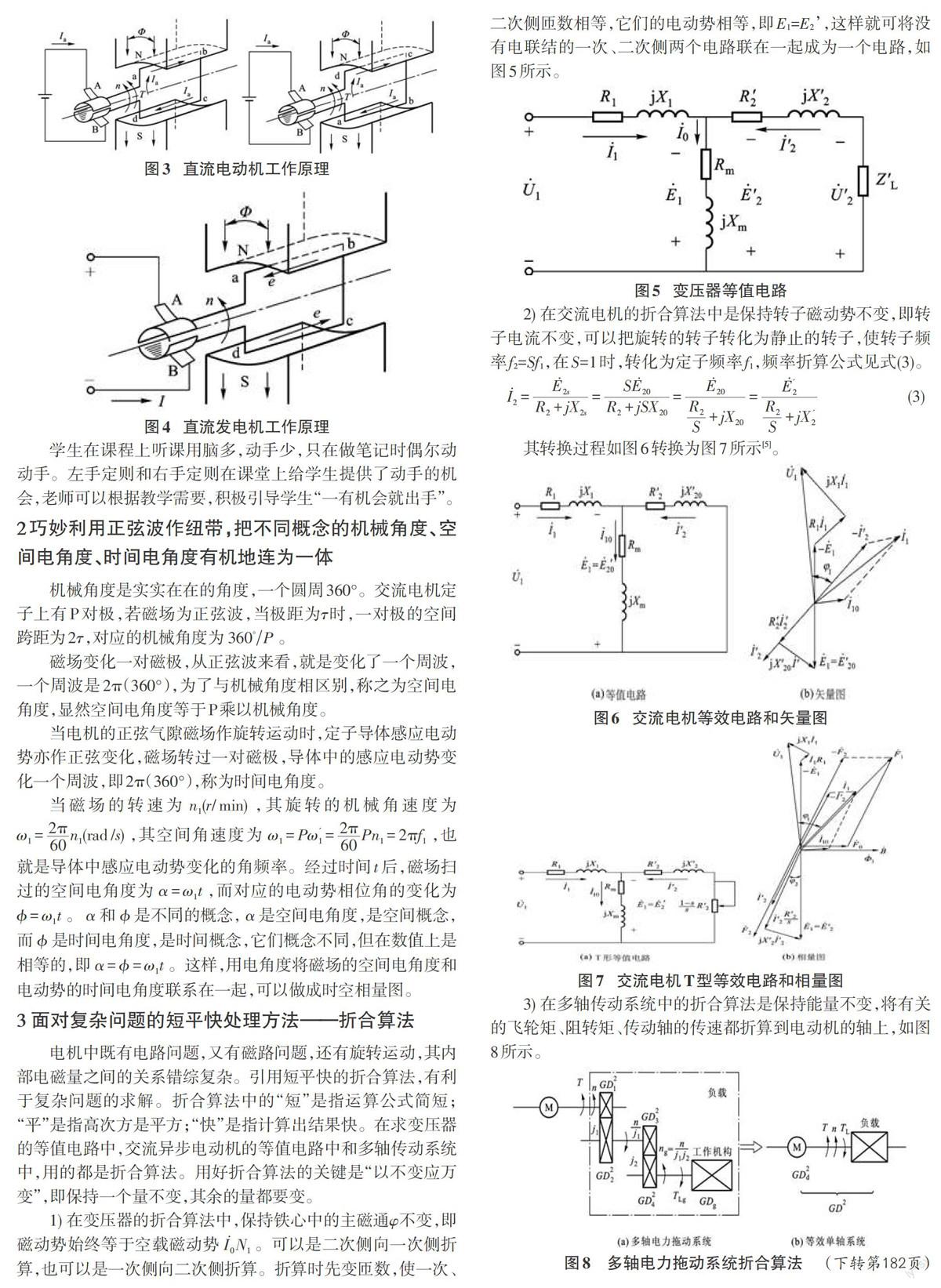
图3 直流电动机工作原理
图4 直流发电机工作原理
学生在课程上听课用脑多,动手少,只在做笔记时偶尔动动手。左手定则和右手定则在课堂上给学生提供了动手的机会,老师可以根据教学需要,积极引导学生“一有机会就出手”。
2巧妙利用正弦波作纽带,把不同概念的机械角度、空间电角度、时间电角度有机地连为一体
机械角度是实实在在的角度,一个圆周360°。交流电机定子上有P对极,若磁场为正弦波,当极距为τ时,一对极的空间跨距为2τ,对应的机械角度为[360?P]。
磁场变化一对磁极,从正弦波来看,就是变化了一个周波,一个周波是2π(360°),为了与机械角度相区别,称之为空间电角度,显然空间电角度等于P乘以机械角度。
当电机的正弦气隙磁场作旋转运动时,定子导体感应电动势亦作正弦变化,磁场转过一对磁极,导体中的感应电动势变化一个周波,即2π(360°),称为时间电角度。
当磁场的转速为[n1(r/min)],其旋转的机械角速度为[ω1=2π60n1(rad/s)],其空间角速度为[ω1=Pω'1=2π60Pn1=2πf1],也就是导体中感应电动势变化的角频率。经过时间t后,磁场扫过的空间电角度为[α=ω1t],而对应的电动势相位角的变化为[?=ω1t]。[α]和[?]是不同的概念,[α]是空间电角度,是空间概念,而[?]是时间电角度,是时间概念,它们概念不同,但在数值上是相等的,即[α=?=ω1t]。这样,用电角度将磁场的空间电角度和电动势的时间电角度联系在一起,可以做成时空相量图。
3 面对复杂问题的短平快处理方法——折合算法
电机中既有电路问题,又有磁路问题,还有旋转运动,其内部电磁量之间的关系错综复杂。引用短平快的折合算法,有利于复杂问题的求解。折合算法中的“短”是指运算公式简短;“平”是指高次方是平方;“快”是指计算出结果快。在求变压器的等值电路中,交流异步电动机的等值电路中和多轴传动系统中,用的都是折合算法。用好折合算法的关键是“以不变应万变”,即保持一个量不变,其余的量都要变。
1) 在变压器的折合算法中,保持铁心中的主磁通φ不变,即磁动势始终等于空载磁动势[I0N1]。可以是二次侧向一次侧折算,也可以是一次侧向二次侧折算。折算时先变匝数,使一次、二次侧匝数相等,它们的电动势相等,即E1=E2,这样就可将没有电联结的一次、二次侧两个电路联在一起成为一个电路,如图5所示。
图5 变压器等值电路
2) 在交流电机的折合算法中是保持转子磁动势不变,即转子电流不变,可以把旋转的转子转化为静止的转子,使转子频率f2=Sf1,在S=1时,转化为定子频率f1,频率折算公式见式(3)。 [I2=E2sR2+jX2s=SE20R2+jSX20=E20R2S+jX20=E'2R2S+jX'2] (3)
其转换过程如图6转换为图7所示[5]。
图6 交流电机等效电路和矢量图
图7 交流电机T型等效电路和相量图
3) 在多轴传动系统中的折合算法是保持能量不变,将有关的飞轮矩、阻转矩、传动轴的传速都折算到电动机的轴上,如图8所示。
最后对电动机列写公式:
[T-TL=JdΩdt=GD2375dndt] (4)
由式(4)确定拖动系统的运动状态是加速、减速,还是稳速运行。
4 结束语
以上是笔者关于“电机与拖动”课程教学过程中几个问题的一些思考,当然,每个教师对这些问题的看法和处理方法可能不同。笔者认为,只要善于在教学工程中不断探索和改进,就能更好地处理这些问题,取得更好的教学效果。
参考文献:
[1] 苗风东,来建民.关于提高电机与拖动课程教学质量的探索与实践[J].中国电力教育,2008(22):85-86.
[2] 张建辉,许莹莹.电机学课程教学方法的探索[J].江汉大学学报:自然科学版,2008(9):55-58.
[3] 顾绳谷.电机与拖动基础[M].4版.北京:机械工业出版社,2007.
[4] 唐介.电机与拖动[M].2版.北京:高等教育出版社,2007.
[5] 李海发.电机学[M].北京:科学出版社,2001.
猜你喜欢
甘肃教育(2020年14期)2020-09-11
甘肃教育(2020年12期)2020-04-13
东方教育(2017年19期)2017-12-05
唐山文学(2016年2期)2017-01-15
中国记者(2016年9期)2016-12-05
中国实用医药(2016年27期)2016-11-30
办公室业务(2016年9期)2016-11-23
大学教育(2016年11期)2016-11-16
戏剧之家(2016年19期)2016-10-31
戏剧之家(2016年19期)2016-10-31
