一种PR结构蛇形机器人的结构优化设计*
2015-09-08 10:14:56李永梅张卫芬迟英姿
电子机械工程 2015年1期
李永梅,张卫芬,迟英姿
(东南大学成贤学院, 江苏 南京 210088)
一种PR结构蛇形机器人的结构优化设计*
李永梅,张卫芬,迟英姿
(东南大学成贤学院, 江苏 南京 210088)
根据仿生蛇多冗余、多自由度的特点,提出了PR结构蛇形机器人机械机构。该机构的主要特点是关节机构的模块化,每个关节具有3个自由度,关节结构中采用了弹簧零件,每个关节有2个电机。在电机没有力作用的情况下,弹簧通过预紧力恢复至初始位置,不需要电气和程序控制,大大简化了操作流程。蛇体运行更加贴合外环境表面,增加了其执行任务过程中的稳定性。突破性实现了轴向伸缩、背部腹部弯曲等功能体态。
PR结构;蛇形机器人;关节结构;轴向伸缩
引 言
蛇形机器人是一种能够模仿生物蛇真实运动的新型仿生机器人。蛇形机器人的研究已经进入到实用阶段。借助仿生蛇其特有的多自由度、多冗余自由度与多种运动形态,可以满足复杂环境中搜救、侦查、排除危险物品等反恐任务的需求。为了在蛇体运动时,能够实现在不同的运动环境中,以不同的形态和体态执行任务,需要设计出能够完成三维运动的新型结构蛇体样机。模块可重构机器人由许多模块组成,这些模块能以多种方式断开或连接,形成具有不同功能的新系统。它有3个显著特点,即通用性、鲁棒性和经济性。蛇形机器人具有模块化结构特点,因此可重构蛇形机器人的研究,极大地拓宽了蛇形机器人的应用领域[1]。
1 PR结构蛇形机器人总体设计方案
遵从柔性设计理念,通过变换不同的程序控制,来实现尽可能多的蛇体运动体态,尽可能地贴近蛇体的生物特性,在结构设计之前,必须明确要完成什么样的蛇体运动。蛇体运动模式和体态众多,但主要由2种基本模式组成:水平弯曲运动和上下仰俯运动。这就要求一个蛇关节至少要能进行2个自由度的运动。
目前几乎所有的蛇体实验样机都只具有2个自由度,通过2个自由度的组合进行实际蛇体的运动控制[2],而使得蛇体运动的体态控制比较复杂,不能实现联合调节,也不能实现生物蛇的复杂形体。现有的蛇形机器人结构主要有4种:扇形齿轮式、链条式、云台式及PR结构形式。扇形齿轮式主要组成是一对垂直安装的扇形半齿轮,并有2个轴心形成弯曲与俯仰运动,但齿轮空间小,小模数扇形齿轮造价高,小模数蜗轮蜗杆和齿轮链这些部件在研制蛇形机器人中须利用现有装置,难以专门设计制造,因此不能选择。链条式结构同样也可实现2自由度运动,但在关节处无法安装电机,圆环框架制造与装配都很麻烦。云台式结构的最大优点在于结构紧凑和承载大,但将其作为仰俯运动部件担负沉重负荷,放置在电机轴上并不合适。
基于以上原因,本文蛇形机器人采用PR结构。PR结构是指俯仰(Pitch)运动中添加绕蛇体纵轴的横滚(Roll)运动。即在作横滚运动的电机轴上安装作俯仰运动的电机。两者为刚性联结,用它们组成一个蛇关节单元,原理图见图1。PR结构是目前较为流行的做法,其优点在于结构简单,效率高。如图所示,电机BN一般不工作,当它处于校零位置时,电机AN作水平弯曲运动,当BN转至法向位置后AN作上下俯仰运动。但此结构对驱动电机力矩的要求过大,且不能实现目前的复杂和高速运动。在运动控制中存在速度慢、控制不方便以及蛇体运动灵活性不足等缺点,所以要在这个PR结构的基础上进行优化。
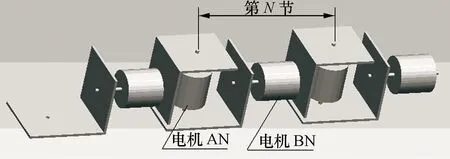
图1 PR结构原理图
2 自由度及关节设计
PR结构的蛇形机器人关节有3个自由度,即俯仰运动、绕蛇体纵轴的横滚运动以及轴向伸缩(Pull-Push)运动。轴向伸缩运动自由度的添加,使得机器人在各种环境中的各种运动体态更容易得到控制。例如在地震废墟中,蛇体要通过狭小的混凝土结构的缝隙时,蛇体的弯曲运动没有用处,需要采用类似于环形动物蚂蝗和蚯蚓的运动体态,通过狭小的空间[3]。
考虑蛇体运动过程中有关重心方面的体态问题,要使蛇体运行过程中,更加贴合外环境表面,增加其执行任务过程中的稳定性[4],设计了图2所示的蛇体关节结构。

图2 PR结构关节图
机器蛇在执行任务过程中,需要有弯曲变形、上下俯仰变形、轴向伸缩变形等体态,每个关节需要安装2个电机。蛇体关节运行原理为:左端电机转动相关角度,带动摇杆,操纵顶针运行至下端的伸缩孔;右端电机旋转,带动丝杠同步旋转,操纵丝杠挡板沿着导槽左行,压缩顶针系统,使得伸缩杆左移,外伸出箱体,实现相邻两关节底端位置变化;右端电机回转至零位,至下一循环。
3 关节动力配置及结构设计
在关节结构设计中主要完成了动力源、关节箱体结构、关节箱体轮廓及主要零件的设计。蛇形机器人每个关节原则上须配备独立动力源,按现有条件可选择位移电机。目前能够选择的只有舵机和步进电机两种位移型电机。
三维运动(爬树)需要较大的转矩,因此必须使用体积大的电机。此外,过重的电缆限制了蛇的关节数。蛇关节电机第2项技术要求是选择转矩体积比大的电机(分子是转矩,分母是体积)。在参阅了大量电机产品资料后,选择型号为24BYJ48的四相八拍带减速比64的永磁步进电机。需要对电机进行静态与制动转矩测定。
如图3所示。一个试验是静态的,即施加多大外力矩可使转轴开始转动。另一试验是在四相电机的某绕组通以40 mA的直流电流,在“电制动”条件下测试输出轴自锁能力,又称保持转矩。第2个试验的意义在于:所测转矩数据与步进脉冲工作时产生的转矩数据比较接近,并且后者略大于前者。第1个试验所得数据为1 760 g·cm,约为产品技术指标规定(350 g·cm)的5倍。此试验在40 mA电流即加载12 V电压的条件下(实测绕组电阻为270 Ω)为2 560 g·cm。可见若加大制动电流,制动转矩能得到很大的提升。因此,蛇关节电机中不参加动作的电机均让其处于使能状态,以增加系统的稳定性。

图3 电机测试图
图4所示为关节箱体轮廓。当各孔单一作用时,负责向一个方向弯曲,即:孔1和孔3负责蛇关节的上下俯仰自由度;孔2和孔4负责蛇关节的左右弯曲运动。当4个孔同时作用时,即完成相邻关节之间的伸缩运动体态。孔5和孔6为电线预留走线孔。在关节的两个电机的运行中,电机A负责旋转伸缩杆至指定位置,电机B负责通过挡板压缩伸缩杆,使得相关控制的位置伸长,以达到相邻关节的轴线变化或相邻关节的间距变化的效果。

图4 关节箱体示意图
为了简化机械结构,在结构设计时,采用了弹簧零件,在电机没有力作用的情况下,弹簧通过预紧力恢复至初始位置。这样不需要电气和程序控制,大大简化了操作流程。
基于运动体态控制和蛇体运行时稳定性的要求,必须降低蛇体关节的重心。圆形蛇体轮廓与地面接触时为点接触,使得蛇体在轴线方向上相对于外环境的旋转自由度得不到控制,降低了稳定性和控制精度,影响体态控制,增加了运动的阻力。因此箱体轮廓并非圆形结构,而是采用三角过圆弧形状轮廓,见图5。

图5 箱体轮廓
4 主要零件设计
4.1 铰链爪和球形垫圈的设计
考虑到关节与关节位置变化时,一个关节与相邻关节有相对转动,在设计时,要规避“运动卡死”与“死角”等情况发生。将结构设计成可转动,且接触面为球面,以减少阻力,见图6(a)和图6(b)。
4.2 伸缩杆件和顶针的设计
作为蛇体运动的主要组成部分之一,伸缩杆件在蛇体整个机构中担任着举足轻重的作用:通过改变伸缩杆在箱体中和箱体外的长度来实现蛇体相邻关节的相对位置的变化。由于伸缩杆件在蛇体运动时是关键零件,在关节蛇体结构的孔中伸缩,有一定的行程,因此装配关系采用间隙配合,且选择强度和刚度较大的1Cr13作为其加工材料。设定伸缩杆的行程为10 mm。考虑到A电机控制摇杆,从而操纵顶针在指定位置工作时,需要和其他部件进行滑动摩擦,因而将顶针设计成锥式,见图6(c)。
4.3 摇杆的设计
摇杆的设计需要考虑其运动时与箱体壁的位置关系以及形状、强度刚度、装配等因素。将其设计成Z形,见图6(d)。
4.4 丝杠挡板的设计
丝杠挡板的设计需要综合考虑蛇体控制的方案:实现弯曲时,需要改变蛇体单个(4个中的1个)位置的伸缩杆件的长度;实现伸缩时,则须控制丝杠挡板压住蛇体杠4个伸缩杆,且要考虑到对顶针的控制。因此将丝杠挡板设计成镂空形,见图6(e)。
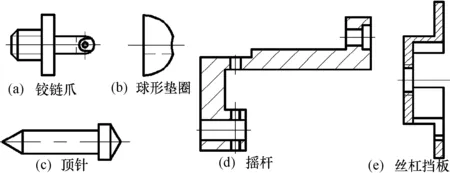
图6 主要零件图
5 运动控制的实现
理想的趋势是建立蛇体行为库,根据摄像头等传感系统搜集的前方目标及障碍物信息选择行为库,进而进行越障运动。最终决定采用51单片机作为MCU,设计扩展电路驱动32个关节电机,做蛇样机的运动试验,控制框图如图7所示。所选用的51系列单片机型号为P89V51RD2,进行编程实验,实现了蛇形机器人在地面的蜿蜒游走运动,见图8。

图7 控制框图
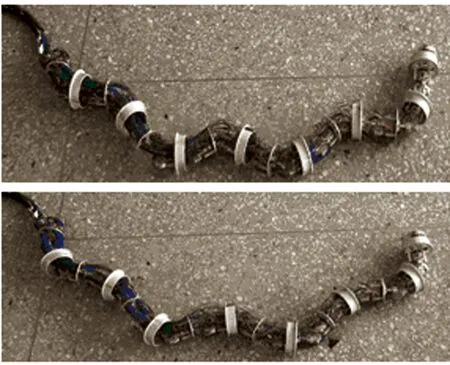
图8 运动实现图
6 结束语
本文实现了一个具有多种运动模式的仿生蛇试验样机。采取增加刚性关节数的方案,尽量缩小关节的轴向径向尺寸长度比。目前蛇关节长度为112 mm、体宽66 mm、总关节数为16节。每关节工作电流最高达2 A,驱动蛇体进行弯曲,与其他各关节配合动作,1.8 m长的蛇体总功率仅为400 W。目前仅能实现蛇形机器人在平整地形上的水平弯曲蜿蜒、“P2P”模式前进、侧向盘旋等运动体态。在后续的发展中可以添加外部环境状态监测设备,如CMOS摄像头、压力传感器等。CMOS摄像头用于对外部大环境的预先监测,以调用相应的行为库,完成游行任务。压力传感器装载于蛇体的各个关节(腹部),以感应游行过程中所受到的力,详细分析细微变化的外环境,优化任务执行行为。
[1] 陈丽, 王越超, 马书根, 等. 一种可重构蛇形机器人的研究[J]. 中国机械工程, 2003, 14(16): 1351-1353.
[2] 黄恒, 颜国正, 熊翔. 蛇形机器人的运动策略[J]. 电机与控制学报, 2002, 6(3): 249-251.
[3] 宋天麟, 王立军. 蛇形机器人的研究与开发[J]. 机械制造与自动化, 2005, 34(6): 120-121.
[4] 崔显世, 颜国正, 陈寅, 等. 一个微小型仿蛇机器人样机的研究[J]. 机器人, 1999, 21(2): 156-160.
李永梅(1979-),讲师,主要研究方向为微机测控。
Structure Optimization Design of a PR Structure Snake-like Robot
LI Yong-mei,ZHANG Wei-fen,CHI Ying-zi
(ChengxianCollegeofSoutheastUniversity,Nanjing210088,China)
Based on the characteristics of redundant and multi-degree of freedom of bionic snake, the mechanical mechanism of PR structure snake-like robot is proposed. The main feature of this mechanism is its modular joint. Each joint has three degrees of freedom, spring parts are used in joint structure, and each joint has two motors. When the motor has no force, the spring returns to the initial position through the pre-tightening force. No electric and program control are needed, the operation process is greatly simplified. The movement of the robot is more fitting to the surface of external environment, increasing its stability during task execution. Breakthrough functional postures such as axial expansion, back and abdomen bending are achieved.
PR structure; snake-like robot; joint structure; axial expansion
2014-10-21
TP24
A
1008-5300(2015)01-0061-04
猜你喜欢
青年文学家(2023年1期)2023-05-30 17:08:38
运动精品(2022年3期)2022-08-12 03:00:52
军事文摘(2021年18期)2021-12-02 01:27:58
中国特种设备安全(2018年10期)2018-12-18 02:17:18
四川冶金(2018年1期)2018-09-25 02:39:26
中国自行车(2018年2期)2018-05-09 07:03:05
电站辅机(2017年3期)2018-01-31 01:46:38
中国音乐教育(2017年5期)2017-05-18 09:59:46
金色年华(2017年13期)2017-04-04 02:55:52
通信电源技术(2016年1期)2016-04-16 04:57:26