
轮式挖掘机行驶速度智能控制的研究
2015-07-10 12:32王志伟马文宇赵明辉孙金泉蔡登胜
建筑机械化 2015年1期
王志伟,马文宇,赵明辉,孙金泉,蔡登胜
(广西柳工机械股份有限公司,广西 柳州 545007)
轮式挖掘机行驶速度智能控制的研究
王志伟,马文宇,赵明辉,孙金泉,蔡登胜
(广西柳工机械股份有限公司,广西 柳州 545007)
针对油门踏板在轮式挖掘机上的应用,提出了一套可靠的轮式挖掘机行驶速度的控制方案,详细介绍了油门踏板信号的采集及其对行走比例阀电流的控制策略。试验证明本方案及控制策略能满足轮式挖掘机在实际工作中的应用。
轮式挖掘机;行驶速度;控制策略;油门踏板;PID
在轮式挖掘机上,油门踏板作为一个核心部件参与整车行驶速度的控制,油门踏板踩下量越大则行驶速度越快。本文详细介绍了轮式挖掘机行驶速度的控制方案、油门踏板信号的采集、油门踏板信号对比例阀电流的控制策略及实际控制效果的分析。
1 整车行驶速度控制方案
本方案采用的油门踏板为双电位器型,其特性如下图所示,油门踏板信号1与油门踏板信号2两路电位器输出电压在每个位置都不相同,但是两者各自的斜率却是基本固定,油门踏板信号2的电压是油门踏板信号1的一半,因此可根据其差值来判断油门踏板输出电压是否正确。这种双电位器设计有效提高了油门踏板的可靠性,因为如果其中一路油门踏板信号发生故障,另一路油门踏板信号可接替从而保证油门踏板正常工作[1]。
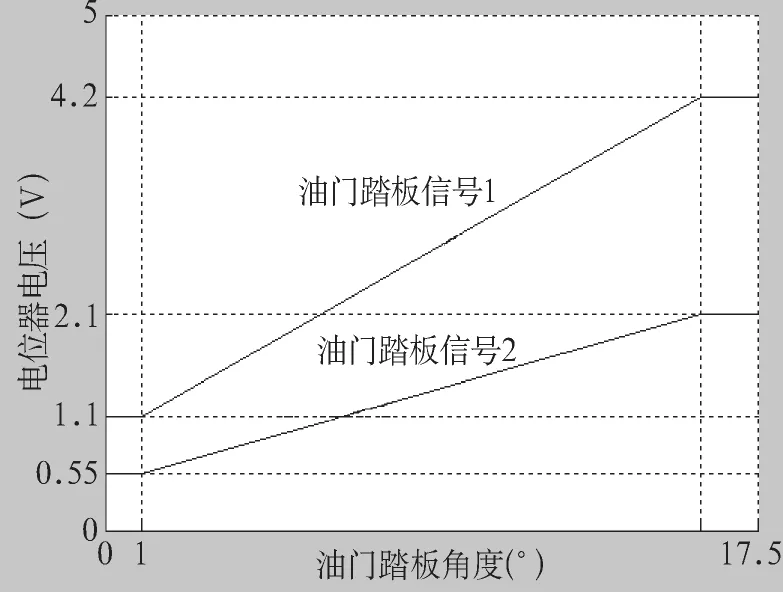
图1 油门踏板特性
在液压系统上,轮式挖掘机行驶速度的大小通过比例阀来控制主控阀的流量,从而控制行驶速度。在同样的发动机转速下,给比例阀的电流越大,则比例阀产生的压力越大,推动主控阀阀杆的力越大,主控阀开口越大,则流量越大,整车车速越快。本方案选择的比例阀特性如图2所示:比例阀的死区电流约为250mA,在250~400mA之间比例阀产生的压力值慢速增加,400mA以上时比例阀产生的压力值能较快增加,此特性为整车的平缓启动及停车提供了保障。
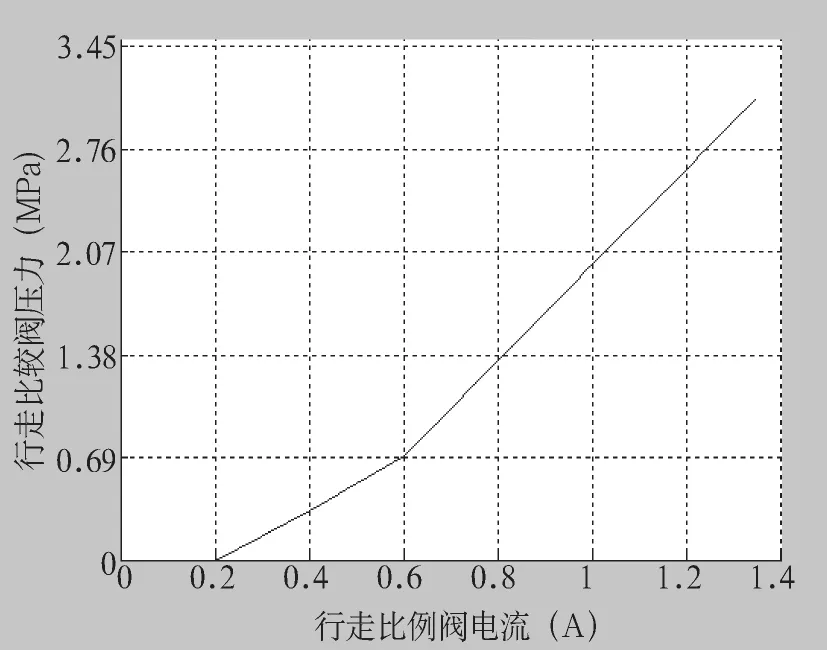
图2 比例阀特性
控制方案如图3,控制器采集油门踏板的电压信号将其转化为数字量,对数字量进行滤波处理后再将其值通过差值计算转化为目标电流值,通过PID控制器调节比例阀电流值来控制比例阀的出口压力,从而控制主控阀的流量,达到控制轮式挖掘机行驶速度的目的[2]。
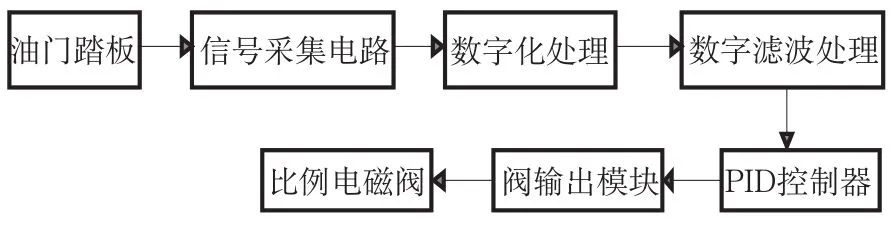
图3 控制方案
2 油门踏板信号的采集
由控制方案可知,油门踏板的信号是控制轮式挖掘机行驶的基础,所以对于油门踏板信号的采集是至关重要的。如果不能有效滤除其他噪音对油门踏板信号的干扰,则整车速度的控制会受到影响。所以针对油门踏板信号的采集使用了如下两种滤波技术。
2.1 算术均值滤波
算术均值滤波是指将采样得到的一组数据求和后除以样本数。其中加权均值滤波指在求和之前对采样数组中的每一个值赋予权重系数αi,加权均值滤波计算公式为
对于算术均值滤波,上式中的αi取1。算术均值滤波不能有效排除干扰,而是将干扰分散,使采集得到的数据变化变得平滑。
2.2 中位值滤波
中位值滤波指将一组数据队列的中位值作为滤波结果输出值的滤波方法[3]。其算法如下:对连续采样采集到的一组数据x1,x2,…,xn,按照从大到小(或者从小到大)的次序进行排列,排列后的数据依次为y1,y2,…,yn。若样本个数m为奇数,则中位值滤波结果为
若样本个数m为偶数,则中位值滤波结果为
中位值滤波能去掉采样数值中的极大值和极小值,对整车上的偶发干扰具有良好的滤波效果,从而保证油门踏板信号的真实、稳定、可靠。
3 比例阀电流的控制策略
对于比例阀电流的控制采用限幅增量式PID进行控制,其算法如式(1)

式中,Δ表示增量;ek表示第k次油门踏板信号采样值对应的目标电流值;ek-1表示第k-1次油门踏板信号采样值对应的目标电流值;ek-2表示第k-2次油门踏板信号采样值对应的目标电流值;Kp表示比例项系数,本系统取2.2;Ki表示积分项系数,本系统取0.1;Kd表示微分项系数,本系统取-0.7;φ表示限幅量,本系统取200。
采用增量式PID控制能够提高比例阀电流的稳定时间,但是会使得电流上升或者下降过于快速,引起主控阀的流量产生急剧变化,导致轮式挖掘机在行驶过程中产生“卡顿”,严重影响操作感受及整车寿命。为了避免这种现象,需要对经过PID运算得出来的增量Δ进行限幅,保证增量Δ在合理的区间内,从而保证整车行驶的平顺性。
另外,对于轮式挖掘机的行驶要求踩下油门踏板后,整车能立即动起来,松开油门踏板后,为了减小冲击,机器需要缓慢停下来,所以对于踩下油门踏板和松开油门踏板后,比例阀的电流响应时间应不相同。当踩下油门踏板后,减小电流的调整时间,使比例阀的电流能迅速上升;当松开油门踏板后,延长电流的调整时间,使比例阀的电流能缓慢降下来。
4 程序流程图(图4)
5 实际控制效果分析
在整车测试时采集比例阀电流与油门踏板信号对应关系曲线如图5、图6所示。图5为带限幅PID调节,此方法能保证当踩下油门踏板后,比例阀的电流能迅速上升,从而保证轮式挖掘机能立即开始行走;当松开油门踏板后,比例阀的电流能缓慢匀速的下降,从而能保证轮式挖掘机无冲击匀速缓慢停下来。图6为无限幅PID调节,此方法能保证当踩下油门踏板后,比例阀的电流能迅速上升,从而保证轮式挖掘机能立即开始行走,但是当松开油门踏板后,电流下降的速度过快,导致主控阀的流量产生急剧变化,使得整车出现“卡顿”及较大冲击。所以带限幅PID调节方法能满足轮式挖掘机在实际中的应用。
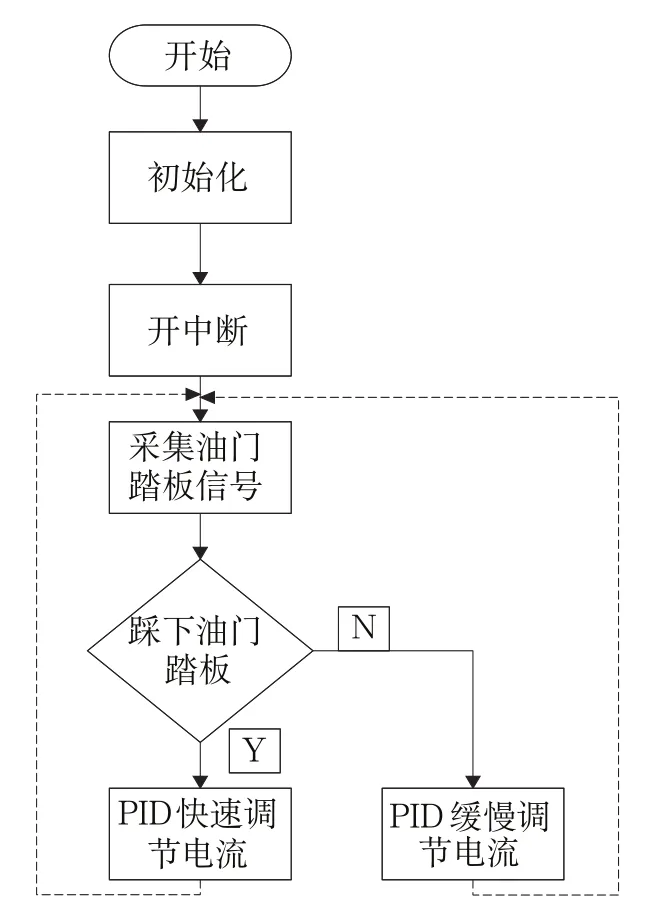
图4 程序流程图
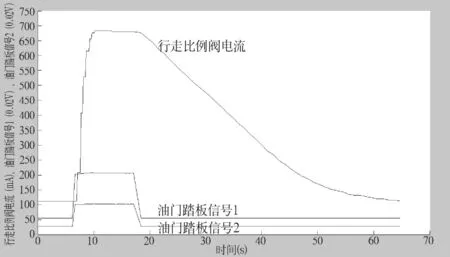
图5 带限幅PID调节
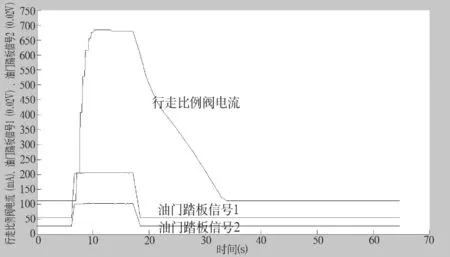
图6 不带限幅PID调节
6 结 语
本文详细介绍了整车行驶速度的控制方案、油门踏板信号的采集、油门踏板信号对比例阀电流的控制策略,并且已在柳工轮式挖掘机上实际应用,经过试验证明该方法能满足轮式挖掘机在实际工作中的应用。
[1]祝柯卿,胡建文,冒晓建,等.电控柴油机双电位器油门踏板控制器策略的研究[J].柴油机,2012,34(4):15-17.
[2]徐小东.WYL20B轮式挖掘机的功率优化控制系统[J].工程机械,2001,(6):22-23.
[3]蔡登胜,罗 维,赵明辉.发动机转速信号的检测及数字滤波方法[J].工程机械,2012,(11):20-24.
(编辑 吴学松)
Research on speed intelligent control of wheel excavator
WANG Zhi-wei, MA Wen-yu, ZHAO Ming-hui, SUN Jin-quan, CAI Deng-sheng
TU621
B
1001-1366(2015)01-0041-03
2014-10-30
猜你喜欢
系统工程与电子技术(2021年8期)2021-07-27
军民两用技术与产品(2021年10期)2021-03-16
岷峨诗稿(2020年4期)2020-11-18
经济技术协作信息(2018年7期)2019-01-14
汽车电器(2018年8期)2018-08-25
中国军转民(2018年1期)2018-06-08
物理化学学报(2015年7期)2015-12-30
现代电子技术(2015年7期)2015-03-21
筑路机械与施工机械化(2014年7期)2014-03-01
水下无人系统学报(2011年6期)2011-09-19
