基于LQG控制的伸缩翼无人机仿真研究*
2015-07-05 15:11:25苏浩秦包晓翔刘凯李平坤
弹箭与制导学报 2015年5期
苏浩秦,包晓翔,刘凯,李平坤
(中国航天空气动力技术研究院,北京 100074)
基于LQG控制的伸缩翼无人机仿真研究*
苏浩秦,包晓翔,刘凯,李平坤
(中国航天空气动力技术研究院,北京 100074)
伸缩翼无人机能满足多种飞行任务需求,但当变形时,气动力与力矩过渡过程变化剧烈,需要一种鲁棒性较强的控制器来满足控制要求。文中采用LQG控制方法,能有效解决伸缩翼变形无人机的控制问题。文中首先对无人机仿射非线性模型进行线性化处理,随后针对线性化模型设计了LQG控制器,最后针对机翼伸缩过程策略伸缩翼非线性模型进行仿真,明确了LQG控制器方法的有效性和鲁棒性。
伸缩翼无人机;LQG控制;机翼伸缩策略;仿射非线性方程
0 引言
伸缩翼变形无人机是无人机未来发展方向之一,根据不同的飞行任务要求,伸缩翼无人机可变化气动外形,使得总体、气动、结构、控制等参数均发生较大的变化。例如,机翼伸展时,大展弦比机翼可适应低速盘旋、巡航或侦查要求;机翼收缩时,小展弦比机翼可适应高速巡航、俯冲或突防等任务要求。因此伸缩翼无人机具有较大的研究价值。
但伸缩翼无人机变形过渡过程较为复杂,需要考虑多个学科带来的影响,设计一套能够满足速度和总体参数变动较大的鲁棒控制器,并需要通过仿真建模的形式考察无人机控制策略。
1 伸缩翼无人机运动建模
文中只考虑伸缩翼无人机纵向运动情况,根据牛顿第二定律与动量矩定律,可以推导出无人机简化纵向运动方程为式(1)仿射非线性运动方程。
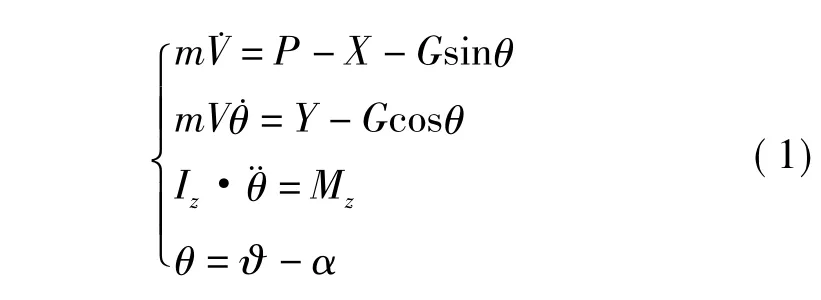
式中:m为飞机质量;V为切向速度;P为发动机推力;X为阻力;G为飞行重量;Y为升力;Iz为飞机俯仰向的转动惯量;Mz为纵向的合力矩;θ为航迹倾斜角;θ为俯仰角;α为仰角。气动力和力矩的表达式为式(2),其中Q为动压,S为机翼面积,Ba为平均气动弦长。Cx,Cy,mz分别为无人机升力系数、阻力系数和俯仰力矩系数。

伸缩翼无人机根据飞行状态差异,分别含有高速构型珔AH、珔BH和低速构型珔AL、珔BL两套总体和气动数据,表达为式(3)与式(4)。式(3)中A代表了总体参数S、Ba在伸缩过渡过程中的数值计算,当无人机高速转低速收缩机翼时,取式(3)中的上标进行插值计算,反之取下标。t变为无人机变形时刻,Δt变为变形时刻到完成变形的时间段。式(4)中珔B代表气动系数Cx,Cy,mz随速度变化的伸缩过渡过程插值,V变为无人机变形时刻速度,ΔV变为变形时刻到完成变形的速度差,其他同式(3)描述。

阵风干扰条件下,可变形飞行器纵向模型(1)在配平点附近的状态方程可描述为:
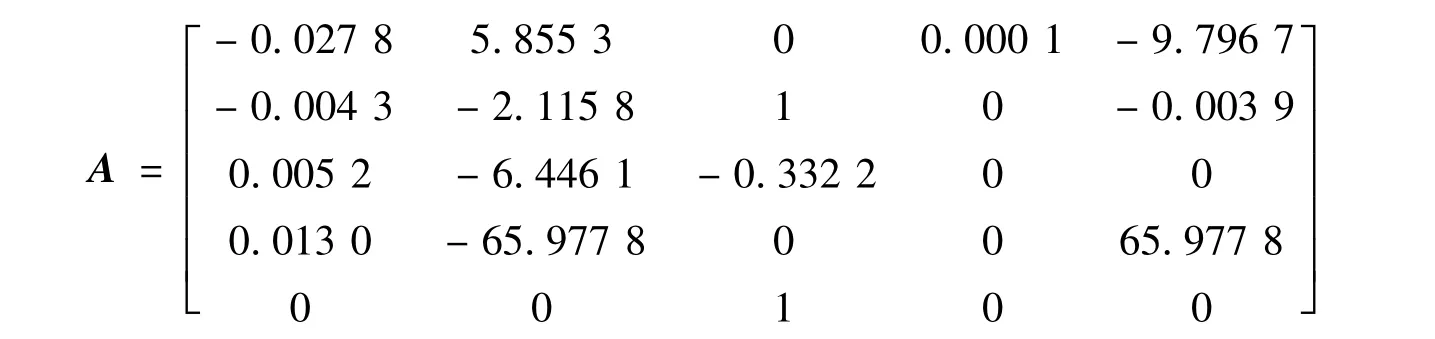


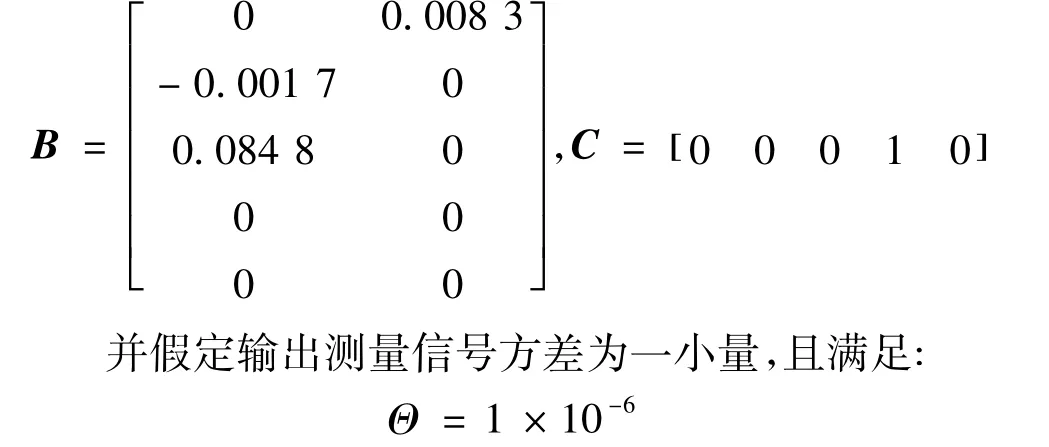
设置初始伸缩翼无人机飞行高度为1 000 m,飞行速度为66 m/s。则可以得到无人机在配平点的状态阵,分别为:
2 LQG控制器设计
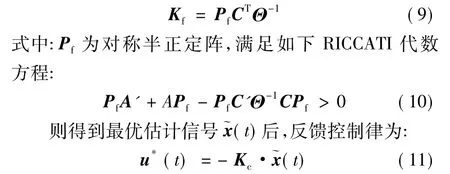
式(5)这类系统由于引入了噪声信号,其控制问题需要估计系统的状态。采用Kalman滤波器估计系统状态,并运用LQ方法来设计反馈调节器K即为线性二次型高斯最优控制LQG方法。Kalman滤波器设计目的是找出使得协方差阵E{(x(t)-^x(t))(x(t)-^x(t))T}最小化状态最优估计信号^x(t),然后用这个估计信号代替原系统中的实际状态变量。这样LQG问题就化简为一般的LQ最优控制问题。
假设反馈向量Kc和Kalman滤波向量Kf可通过分离原理得到,考虑Kalman滤波器方程(5):

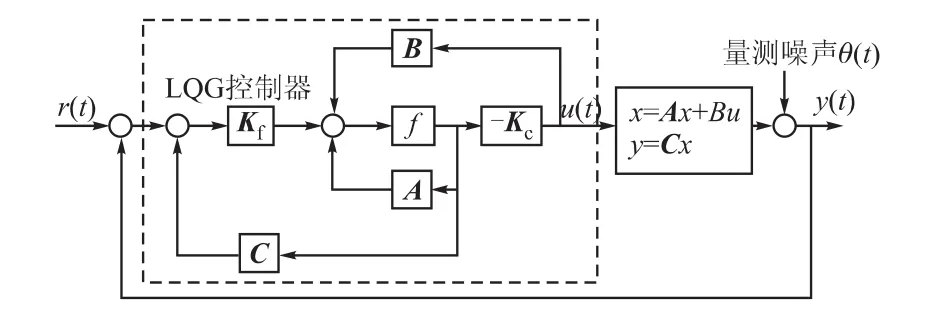
图1 LQG控制结构

图1显示了Kalman滤波器结构,Kalman滤波器增益阵可由式(7)得出:
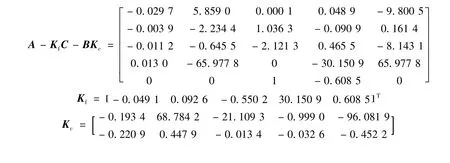
根据变形无人机线性化运动方程式(5),并且结合LQG计算过程式(7)~式(11),可获得LQG式(8)的系统状态方程表达为:
可得到基于观测器LQG的调节器为
3 伸缩翼过渡段非线性仿真
基于线性高斯二次型LQG控制器的伸缩翼无人机变形仿真可见图2。图2中无人机对象为式(1)纵向非线性系统,其输出量只有高度可用无线电高度表进行反馈,但测量含有零均值白噪声,用此反馈量跟随高度hc信号,其误差量通过LQG控制,输出升降舵和推力两个系统输入量,实现系统闭环控制。
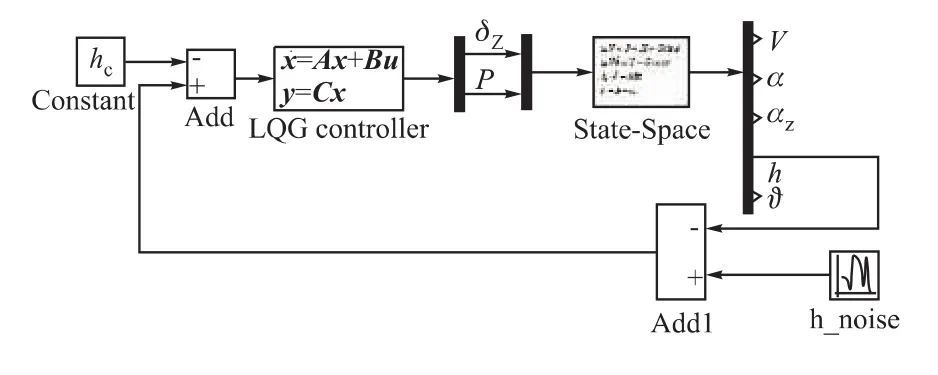
图2 伸缩翼无人机LQG控制仿真
LQG控制结构采用第2节设计参数。在此条件下研究伸缩翼无人机变形过程参数变化。仿真初始条件为:v=66 m/s,α=0°,ωz=0°/s,h=1 000 m,θ =0°。
伸缩翼无人机变形策略为:机翼收缩时间段发生在50~200 s之间。推力在50 s前保持150 N,从50 s时从150 N增加到300 N,让推力在机翼缩回时开环增加,直到速度由0.2 Ma加速到0.4 Ma。在100 s时,开始收缩变形用时10 s。伸展时间段发生在200~400 s之间,推力在200 s前保持300 N,从250 s时从200 N减小到150 N,让推力在机翼伸展时开环减小,直到速度由0.4 Ma减小到0.2 Ma。在250 s时,开始变形,机翼伸展变形用时10 s,推力在250 s时从300 N减小到100 N。
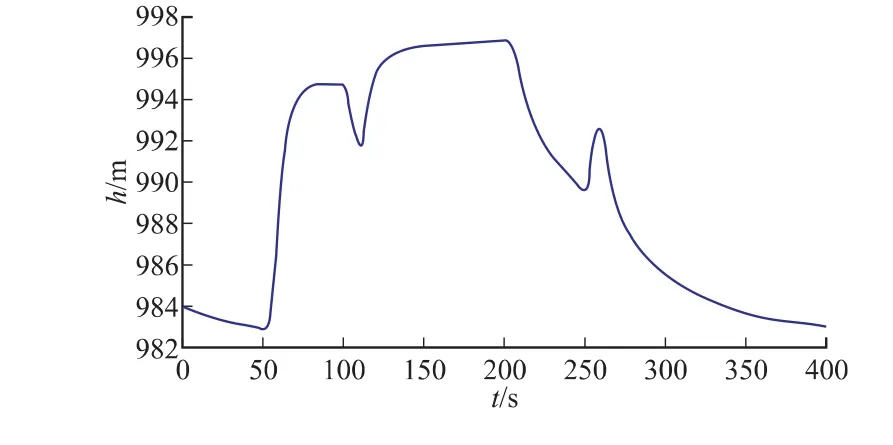
图3 高度随时间变化曲线
图3~图8显示了在LQG控制器调节作用下,飞行参数的变化情况。图3中高度测量值中加入了均值为零方差1×10-6的高斯白噪声。
伸缩翼无人机从50 s开始,推力从150 N增加到300 N,气动总体参数不变前提下,迎角与俯仰角均随着速度增加而减小,到200 s时,总体构型发生变化,10 s内缩进高速构型布局,姿态角和迎角需要迅速提高补充升力损失,但随着速度逐渐增加到132 m/s左右,姿态角和迎角则缓慢下降到稳定状态,高度和速度随之稳定。
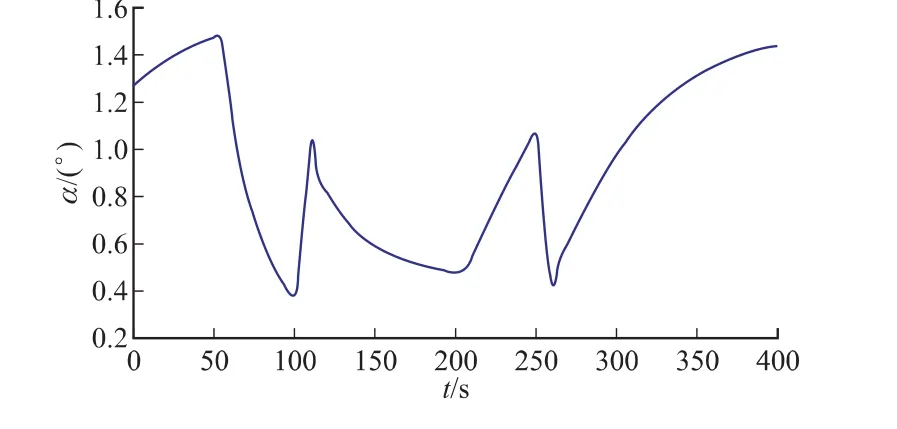
图4 迎角随时间变化曲线
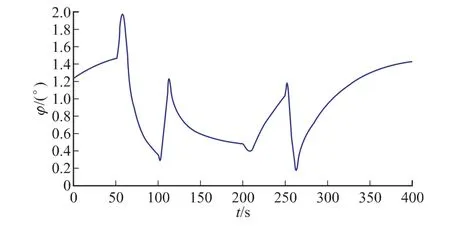
图5 俯仰角随时间变化曲线
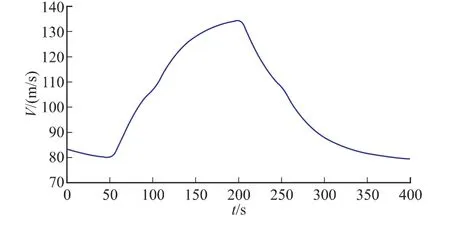
图6 速度随时间变化曲线
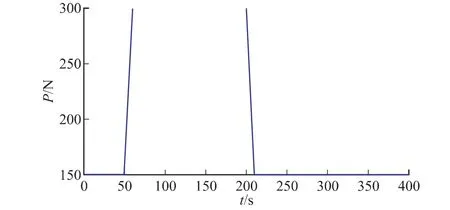
图7 推力随时间变化曲线
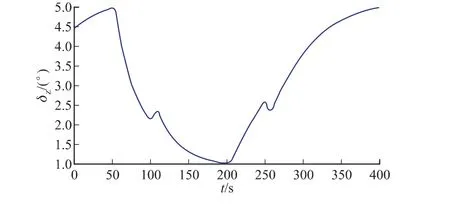
图8 升降舵随时间变化曲线
从200 s时,推力减小,速度降低,姿态角和迎角随之增大弥补动压和升力损失,高度轻微下降,到250 s时,总体构型发生变化,10 s内机翼伸展低速构型布局,为平衡升力上升带来的力不平衡,姿态角和迎角随之减小,但随着推力逐渐下降,姿态角和迎角逐渐增大到平衡点附近。
由仿真图形可见,LQG控制器仅用高度反馈量就实现全状态估计,达到全状态反馈控制的效果。且能有效对高度测量量的白噪声信号实现滤波,达到对非线性系统控制的效果。
4 结束语
LQG控制器抑制随机白噪声阵风具有良好的效果且工程容易实现,文中对可变形飞行器线性化模型实现了LQG控制,仿真表明LQG控制能有效抑制噪声,并可用相对少的反馈量估计出全状态变量。进而将LQG控制器应用到了变形飞行器非线性仿真上,结果表明此控制器能有效实现飞行器变形过程,达到要求控制结果,对噪声的干扰和抑制有一定效果。
[1]Anders S W.Modelling and control of tensegrity structures[D].Norwegian:Norwegian University of Science and Technology,2007.
[2]Mujahid A,Rick L.Control and simulation of a multi-role morphing micro air vehicle,AIAA 2005-6481[R].2005.
[3]Neha G,Akhilesh J,Jeffrey M.Intelligent control of a morphing aircraft,AIAA 2007-1716[R].2007.
[4]Manoranjan M,John L J.Robust control of redundantly actuated dynamical systems,AIAA 2006-6235[R].2006.
[5]胡寿松,王执铨,胡维礼.最优控制理论与系统[M].2版.北京:科学出版社,2005.
LQG Control Problem for Morphing UAV
SU Haoqin,BAO Xiaoxiang,LIU Kai,LI Pingkun
(China Academy of Aerospace Aerodynamics,Beijing 100074,China)
Morphing wing unmanned aerial vehicle(UAV)can satisfy multitask requirements,and is a tendency for future UAV.When morphing wing extending or shrinking,aerodynamics and moments vary largely,so a kind of robust controller is needed to satisfy the transitional process.This paper brings out LQG controller which can solve above problems.Firstly,affine nonlinear model of morphing UAV was dealt with,the LQG controller was designed for this linear model,at last,simulation was realized for morphing wing UAV,and control policy was analyzed,thus LQG controller was proved to be valid and robust.
morphing wing UAV;LQG controller;control policy of flexing wing;affine nonlinear model
V221.3
A
10.15892/j.cnki.djzdxb.2015.05.003
2014-06-25
总装2012年技术基础计划(HK30120121BZ39)资助
苏浩秦(1975-),男,陕西西安人,高级工程师,博士,研究方向:飞行器总体设计与控制。
包晓翔(1990-),男,Email:baoxiaoxiang@foxmial.com.
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
装备制造技术(2020年1期)2020-12-25 05:18:18
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
空间科学学报(2020年4期)2020-04-22 01:17:20
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
航空学报(2015年4期)2015-05-07 06:43:28
科技传播(2014年4期)2014-12-02 01:59:42
振动、测试与诊断(2014年5期)2014-03-01 01:14:27
新疆人文地理(2009年4期)2009-09-24 06:43:56