基于视觉感知的立体图像零水印算法研究
2015-07-02 00:19李琛于水源
中国传媒大学学报(自然科学版) 2015年6期
李琛,于水源
(中国传媒大学 计算机学院,北京 100024)
基于视觉感知的立体图像零水印算法研究
李琛,于水源
(中国传媒大学 计算机学院,北京 100024)
人眼感知立体图像,主要是对图像内容和深度信息的感知,而视点之间的差异是形成立体图像深度感知的一个重要原因。本文基于人眼视觉感知特性,提出了视点零水印和视差零水印算法,视点零水印将视点图像的亮度Y分量分块做DCT变换,并根据DCT域中低频系数的大小关系来构造视点零水印,提高了水印的鲁棒性和不可见性;视差零水印通过求取左右视图的视差值,搜索得到左右视图的匹配区域,根据匹配区域内左右图像块的DC系数大小关系来构造视差零水印。统计两类零水印恢复率,达到对立体图像质量和立体感知质量客观评价的目的。实验结果表明,该水印算法具有良好的鲁棒性和不可见性,通过水印恢复率客观评价图像质量和立体感知质量,与人眼主观评价具有一致性。
立体图像;视点零水印;视差零水印;DCT;水印恢复率
1 引言
立体视频日趋普及,人们观看立体视频能够获得对场景身临其境的感觉,这是由于立体视频不仅能提供内容信息,还能提供场景的深度信息。为保护视频所有者的版权,通常会在立体视频中嵌入数字水印。视频是由连续播放的图像组合而成的,图像是视频的主要表现形式之一。所以,对视频问题的研究可以转化到对图像问题的研究。文献[1]基于DCT变换的频域水印算法,将经过逆离散余弦变换的水印与载体信息相加,从而实现了频域视频水印的空域实现。文献[2]提出了一种基于内容特征的视频半脆弱水印算法,通过对视频亮度分量进行计算,生成特征值并嵌入水印,可以定位帧内恶意篡改。但是,传统的水印算法需要改变原始数据,在一定程度上会破坏原始视频的完整性,降低视频质量,影响其深度感。
为解决此问题,温泉[3]等人提出了零水印的概念。在零水印技术中,通过提取媒体中的重要特征以及代表版权的水印信息来构造零水印,生成的零水印并不直接嵌入原始媒体中,而是在权威的第三方版权保护数据库中注册,从而实现对版权的保护。文献[4]提出了基于DCT变换的立体图像零水印算法,根据立体图像的左右视图求出全局视差,利用左右图像的对应关系完成水印的嵌入。文献[5]提出了一种基于DWT-SVD的图像双零水印算法,一个水印利用SVD空间向量能够表征图像的结构特性的性质,降低了水印提取时的虚警率;一个水印采用小波变换系数构造零水印信息,提高了算法的鲁棒性。实验证明,零水印具有很好的不可见性和较高的鲁棒性,但是以上算法局限于平面图像,对立体图像的嵌入也只考虑到视差因素,没有充分考虑人类视觉特性,将二者融合应用于立体图像中。
人眼感知立体图像,主要是对图像内容和深度信息的感知,而视点之间的差异是形成立体图像深度感知的一个重要原因。本文结合各算法的优势,在人眼视觉感知基础上,设计了针对图像内容的视点零水印和针对深度感知的视差零水印。
2 基于视觉感知的立体图像零水印算法方案设计
数字水印按嵌入位置不同分为空域水印和变换域水印。空域水印通过随机选择图像空间中最不重要的像素位直接嵌入水印信息实现,该算法直接在空域中叠加水印信息,能简单快速地实现水印的嵌入,但由于将水印信息嵌在图像中最不重要的像素位,因而容易受到压缩算法的攻击,鲁棒性差。变换域水印通过对原始信号进行DCT、DWT等变换,将数据从空域转到变换域,在变换域中嵌入水印信息,再将含水印的数据从变换域转回空域。在变换域中嵌入水印信息,可以将水印信号能量分布到空域中所有像素上,鲁棒性较好。DCT 变换是变换域算法中最常用的一种水印算法,将图像进行DCT变换,能量集中在低频系数,一般的图像攻击也无法改变这部分数据,选择低频系数与版权信息来构造零水印,具有很好的鲁棒性和隐蔽性。
本文通过对离散余弦变换(DCT)域中图像特性进行研究,将视点图像的亮度Y分量分成不重叠的8*8大小的分块,对其做DCT变换,根据DCT域中低频系数的大小关系来构造视点零水印。
根据人眼视觉特性,左右眼观看到的画面在视网膜上所成的像略有不同,通过大脑处理融合后会产生深度信息,左右视图的视差信息是深度感知的重要线索。本文求取左右视图的视差值,根据视差值水平搜索得到立体图像左右视图的匹配区域,根据匹配区域内左右图像块的DC系数大小关系来构造视差零水印。
图1为本文提出的基于视觉感知的立体图像零水印算法模型图。
2.1 立体图像视点零水印算法
我们选择印有版权logo的二值图像作为水印信息,在嵌入前会先对水印图像进行置乱,置乱后的水印图像无法辨认,在不知道置乱类型和恢复置乱所需参数情况下无法恢复水印图像,保证了水印图像的安全性。本文采用Arnold变换对水印图像进行置乱。对于任意M>2,Arnold变换公式为
(1)

图1 基于视觉感知的立体图像零水印算法模型图
Arnold变换周期N是使得上式成立的最小自然数n,那么,对M*M的二值水印图像进行K次置乱,再对其进行N-K次可还原水印图像。
再将视点图像的Y分量8*8分块,按块进行DCT变换。最后对置乱后的水印像素位和视点图像对应块中低频系数大小关系值进行异或,相同则标记0,相反则标记1,标记位记录于独立文件中作为视点零水印,频域中的低频系数不作改变。最后进行DCT逆变换得到嵌完零水印后的视点图像,由于并未更改频域系数,该图像质量接近于原始图像。检测和提取水印是水印构造的逆过程。
2.1.1 视点零水印的构造
Step1 读取M*M的二值水印图像,进行K次Arnold置乱。
Step2 将载体图像的Y分量8*8分块,按块进行DCT变换。由于低频系数集中了图像的绝大部分能量,稳定性强,因此选择低频系数与水印像素位来构造零水印,构造过程如下:rationi=BLOCKi[1,1]>BLOCKi[1,2]?:1,0
(2)
signi=rationi⊕watermarki
(3)
(1)比较低频系数BLOCKi[1,2]和BLOCKi[1,3]的大小关系,若BLOCKi[1,1]大于BLOCKi[1,2],则标记relationi为1,否则标记relationi为0;
(2)将低频系数关系值relationi与水印像素位watermarki进行异或。若二者同为1或者同为0,则不改变低频系数BLOCK,将标记位signi记为0;若二者不同值,也不改变低频系数BLOCK,将标记位signi记为1;
(3)对载体图像当前块i进行逆DCT变换;
(4)若i Step3 将零水印sign存入文件,作为提取水印信息的公钥,在权威的第三方版权保护数据库中注册。将水印图像尺寸M*M作为提取水印信息的私钥,保存在版权所有人手中。 2.1.2 视点零水印的检测 检测和提取水印是水印构造的逆过程。 Step1 读取公钥文件,将零水印赋值给sign。 Step2 对失真视点图像的Y分量进行8*8分块,按块进行DCT变换。选择低频系数与零水印来提取水印值,提取过程如下:rationi=BLOCKi[1,1]>BLOCKi[1,2]?:1,0 (4) watermarki=rationi⊕signi (5) (1)比较低频系数BLOCKi[1,2]和BLOCKi[1,3]的大小关系,若BLOCKi[1,1]大于BLOCKi[1,2],则标记relationi为1,否则标记relationi为0; (2)将低频系数关系值relationi与零水印值signi进行异或。当零水印值signi为0时,则水印像素值watermarki与低频系数关系值relationi相同,即watermarki=relationi;当零水印值signi为1时,则水印像素值watermarki与低频系数关系值relationi相反,即watermarki=1-relationi; (3)对载体图像当前块i进行逆DCT变换; (4)若i Step3 读取私钥,根据水印图像尺寸M*M确定 Arnold 变换周期 N,将得到的水印信息再进行(N-K)次Arnold 变换,得到最终提取的水印图像。 2.2 立体图像视差零水印算法 立体图像的左右视图包含大量相似信息,双目视差在物体边缘表现最为明显。图2和图3分别为立体图像的左视图和右视图,方框中为两者相似部分,视图偏移距离为视差值。 图2 左视图 图3 右视图 求取左右视图的视差值,最直接的方法是将左右视点图像中每个点做匹配,然后逐一比较视差,但是这种匹配方法计算量巨大,且容易出现误匹配。本文采用的方法是将立体图像的左右视图分别转化为灰度图,按列进行分割,立体图像左右视图被分割成许多对应的图像块,这样可以将在左右视图中逐一寻找对应点,求取视差的问题转化为左右视图灰度图的分割,寻找左右视图对应图像块,求取图像块的视差问题。 视差值的计算最常用的方法有灰度差平方和灰度差绝对值等,本文采用灰度差绝对值和作为左右视图的视差值,公式如下: (6) 其中,W和H分别为视点图像的宽高,IL和IR分别为左右视图的灰度值,i表示左右视点图像偏移列数,x,y分别为对应像素坐标。 根据以上公式,求得Valuei的最小值,此时对应的i值即为左右视图的视差值。 2.2.1 视差零水印的构造 Step1 读取M*M的二值水印图像,进行K次Arnold置乱。 Step2 求取左右视图的视差值d,找到立体图像左右视图的匹配区域。 Step3 将左右视图匹配区域的Y分量8*8分块,按块进行DCT变换。由于DC系数集中了图像的绝大部分能量,稳定性强,因此选择DC系数与水印像素位来构造零水印,构造过程如下: (1)比较左右视图第i个图像块的DC系数大小关系,若lDCi大于rDCi,则标记relationi为1,否则标记relationi为0; (2)将DC系数关系值relationi与水印像素位watermarki进行异或。若二者同为1或者同为0,则不改变DC系数,将标记位signi记为0;若二者不同值,也不改变DC系数,将标记位signi记为1; (3)对左右视图当前块i进行逆DCT变换; (4)若i Step4 将零水印sign存入文件,作为提取水印信息的公钥,在权威的第三方版权保护数据库中注册。将水印图像尺寸M*M作为提取水印信息的私钥,保存在版权所有人手中。 2.2.2 视差零水印的检测 检测和提取水印是水印构造的逆过程。 Step1 读取公钥文件,将零水印赋值给sign。 Step2 求取失真左右视图的视差值d’,找到立体图像左右视图的匹配区域。 Step3 对失真左右视图匹配区域的Y分量进行8*8分块,按块进行DCT变换。选择DC系数与零水印来提取水印值,提取过程如下: (1)比较DC系数lDCi和rDCi的大小关系,若lDCi大于rDCi,则标记relationi为1,否则标记relationi为0; (2)将DC系数关系值relationi与零水印值signi进行异或。当零水印值signi为0时,则水印像素值watermarki与DC系数关系值relationi相同,即watermarki=relationi;当零水印值signi为1时,则水印像素值watermarki与DC系数关系值relationi相反,即watermarki=1-relationi; (3)对左右视图当前块i进行逆DCT变换; (4)若i Step4 读取私钥,根据水印图像尺寸M*M确定 Arnold 变换周期 N,将得到的水印信息再进行(N-K)次Arnold 变换,得到最终提取的水印图像。 本次实验采用了1800*544左右格式的彩色立体图像,左右图像大小为900*544,水印图像为二值图像,大小为64*64,在Matlab上进行了仿真实验。实验中为了检测算法的鲁棒性,对载体图像进行了多种攻击。文中用线性归一化值NC来衡量提取出来的水印与原始水印的相似性程度,计算公式如下: NC= (7) 其中,W(i,j)表示原始水印信息,W’(i,j)表示提取出的水印信息。 3.1 立体图像视点零水印实验 以右视图为例,图4分别为原始图像、原始水印图像和提取出来的水印图像,图5是几种攻击后的实验结果。表1列出了图像在受到攻击后提取出的水印恢复率。 (a)原始图像 (c)提取水印图4 原始图像、原始水印和提取出的水印 (d)0.09高斯噪声NC=0.9318 (e)0.09椒盐噪声NC=0.9636 (b)原始水印 (f)JPEG压缩Q=70 NC=0.9865 图5 几种攻击后的实验结果 攻击类型参数NC值嵌入水印NC值高斯噪声0.090.93180.83850.50.89890.8438椒盐噪声0.090.96360.90630.150.86600.8101JPEG压缩70%0.98650.943730%0.95900.8412 本文视点零水印算法采用低频系数和版权信息来构造零水印,生成的零水印信息存放在独立文件中,没有对原始载体图像做任何改变。实验结果表明,视点图像在受到以上几种攻击后,如高斯噪声、椒盐噪声、JPEG压缩攻击,仍然能够提取出清晰的水印信息,本算法具有很好的鲁棒性和不可见性。而嵌入式水印算法在嵌入水印时对原始载体图像进行了不同程度的修改,载体图像在一定程度上遭到破坏,水印的不可见性和鲁棒性都不尽如人意。 此外,对水印恢复率进行统计,可以客观评价视点图像遭受攻击后的图像质量。 3.2 立体图像视差零水印实验 图6分别为原始左视图、右视图、原始水印和提取出来的水印图像,图7是几种攻击后的实验结果。表2列出了图像在受到攻击后提取出的水印恢复率。 (a)原始左视图 (b)原始右视图 (d) 0.09高斯噪声NC=0.9222 (e) 0.09椒盐噪声NC=0.8724 (c)原始水印 (d)提取出的水印 (f)JPEG压缩Q=70 NC=0.9808图7 几种攻击后的实验结果 攻击类型参数NC值高斯噪声0.090.92220.50.8989椒盐噪声0.090.87240.150.8750JPEG压缩70%0.980830%0.9601 本文视差零水印算法利用匹配区域内左右图像块的DC系数大小关系和版权信息来构造视差零水印,当立体图像受到攻击时,左右对应图像块的频域系数变化趋势一致。从实验结果来看,当左右视图受到高斯噪声和椒盐噪声攻击后,提取出来的水印信息恢复率不如视点零水印算法提取的高,但水印图像仍然肉眼可辨;当左右视图受到JPEG压缩攻击后,提取出来的水印信息恢复率高,水印较为清晰。 由于左右对应图像块受到同样的攻击,直流DC系数大部分还保留原来的对应关系,那么造成水印恢复率明显降低的原因,可能与左右视图对应视差值的变化有关。攻击可能造成左右视图匹配区域发生改变,那么对应的视差值也就发生变化,从而导致水印提取的区域与嵌入区域有些微不同,水印恢复率明显降低。 本文提出了基于视觉感知的视点零水印和视差零水印算法,视点零水印将视点图像的亮度Y分量分块做DCT变换,并根据DCT域中低频系数的大小关系来构造视点零水印,提高了水印的鲁棒性和不可见性,统计水印恢复率,客观评价了视点图像遭受攻击后的图像质量;视差零水印通过求取左右视图的视差值,搜索得到左右视图的匹配区域,根据匹配区域内左右图像块的DC系数大小关系来构造视差零水印,通过零水印恢复率可以判断受攻击后立体图像的左右视差是否发生变化,从而客观评价立体图像的立体感知质量。 本文提出的零水印算法摆脱了传统水印嵌入算法的弊端,保证了原始立体图像的良好质量,实验结果表明,该类零算法是具有很好的鲁棒性和不可见性。通过统计水印恢复率,能够客观评价图像质量和立体感知质量。 下一步的工作,就是基于人眼视觉感知,设计一个立体图像质量评价模型,利用该模型来学习两类零水印恢复率(视点零水印和视差零水印)与主观评价值的关系,并用训练好的模型完成立体图像质量预测。 [1]张能欢,于水源.基于DCT变换的频域视频水印在空域中实现的性能分析[J].中国传媒大学学报(自然科学版),2014,(2):40-45. [2]唐萌佳,于水源.基于内容特征的视频半脆弱水印算法[J].中国传媒大学学报(自然科学版),2014,(5):48-53. [3]温泉,孙锬锋,王树勋.零水印的概念与应用[J].电子学报,2003,(2):214-216. [4]赵文龙,于水源.基于立体图像水印算法的研究[J].中国传媒大学学报(自然科学版),2014,(6):40-45. [5]陈伟琦,李倩基.基于DWT-SVD的图像双零水印算法[J].计算机工程与科学,2014,(10):1991-1996. [6]Zhou W J,Yu M,Yu S M,Jiang G Y ,et al.A zero-watermarking algorithm of stereoscopic image based on hyperchaotic system[J]. Acta Physica Sinica,2012,61(8):080701. [7]周武杰,郁梅,蒋刚毅,彭宗举,邵枫.基于视觉感知和零水印的部分参考立体图像质量评价模型[J].电子与信息学报,2012,(8):1786-1792. [8]岳斌,侯春萍. 立体视差调整的快速估计方法[J]. 天津大学学报(自然科学与工程技术版),2013,(7):571-578. [9]Wang S,Zheng D,Zhao J Y,Tam W J,Speranza F. An image quality evaluation method based on digital watermarking [J]. IEEE Transactions on circuits and systems for video technology,2007,17(1):98-105. [10]Lin Y H,Wu J L. A digital blind watermarking for depth-image-based rendering 3D images[J]. IEEE Transactions on Broadcasting,2011,57(2):602-611. [11]黄西娟,王冰.一种DCT变换域的鲁棒数字水印[J].计算机工程,2011.(20):145-148. [12]李春艳,娄七明,刘靖屏. Arnold置乱在零水印中的二次复用[J]. 网络安全技术与应用,2012,(12):61-63. [13]吴爱红.面向立体图像/视频数字水印技术的方法研究[D].宁波大学,2012. [14]庄晓梅.基于DCT域数字图像鲁棒水印方案的研究及实现[D].山东师范大学,2013. [15]Wang Z,Bovik A C,Sheikh H R,et al. Image quality assessment:from error visibility to structural similarity[J]. IEEE Transactions on Image Processing,2004,13(4):600-612. (责任编辑:龙学锋) Zero-Watermarking Algorithm Research of Stereo Images Based on Visual Perception LI Chen,YU Shui-yuan (Computer Science School,Communication University of China,Beijing 100024,China) The human eye’s perception to stereo image bases mainly on the perception of image content and depth information,and the difference between the viewpoints is an important clue for the depth perception of stereo image. In this paper,based on the characteristics of human visual perception,a view zero-watermark and disparity zero-watermark algorithm is proposed. In the algorithm,we choose the Y component of view image for respectively transforming in block DCT,and the view zero-watermark is constructed by the relationship between the low-frequency coefficients of block DCT,which improving the robustness and invisibility of the watermark. By computing the disparity according to the left and right views,we can work out their similar area,and the disparity zero-watermark is constructed by the relationship between the DC coefficients of left view and right view. By computing the recovery rate of two categories of zero-watermark,we can objectively evaluate the quality of image and stereo perception,which is consistent with the result of the subjective evaluation of the human eye. The experimental results show that the watermark is remarked for high robustness and invisibility. Stereo images; view zero-watermark; disparity zero-watermark; DCT; the recovery rate of watermark 2015-10-10 国家科技支撑“3D视频内容渲染及水印管理系统研制”(2013BAH54F03) 李琛(1992-),女(汉族),江苏南京人,中国传媒大学计算机学院研究生. TP309.2 A 1673-4793(2015)06-0028-07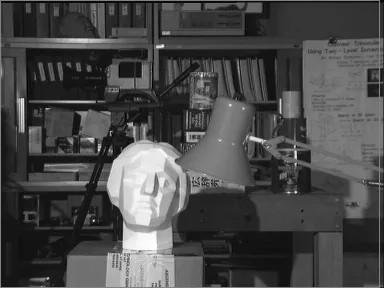

3 实验结果分析










图6 原始左右视图、原始水印和提取出的水印

4 结论
猜你喜欢
机械研究与应用(2022年2期)2022-05-21计算机工程(2022年3期)2022-03-12小型微型计算机系统(2022年1期)2022-01-21科技研究·理论版(2021年22期)2021-04-18计算机与数字工程(2020年11期)2020-12-23农业机械学报(2020年2期)2020-03-09中华建设(2019年7期)2019-08-27电脑知识与技术(2016年28期)2016-12-21现代计算机(2016年3期)2016-09-23环境(2016年7期)2016-05-14