基于AIS距离-多普勒投影的地波雷达CFAR检测验证方法
2015-06-24 14:10:10王祎鸣张杰纪永刚楚晓亮
海洋学报 2015年4期
王祎鸣,张杰,纪永刚,楚晓亮
(1. 国家海洋局 第一海洋研究所,山东 青岛 266061;2.海洋遥测工程技术研究中心(国家海洋局与航天科技集团共建),山东 青岛 266061)
基于AIS距离-多普勒投影的地波雷达CFAR检测验证方法
王祎鸣1,2,张杰1,2,纪永刚1,2,楚晓亮1
(1. 国家海洋局 第一海洋研究所,山东 青岛 266061;2.海洋遥测工程技术研究中心(国家海洋局与航天科技集团共建),山东 青岛 266061)
恒虚警(CFAR)检测是地波雷达船只目标探测的主要方法。目前基于船舶自动识别系统(AIS)信息的CFAR检测验证方法是一种间接验证方式,容易受地波雷达系统测向误差的影响,且不具备对错检与漏检目标的分析能力。本文提出了一种基于AIS信息的评价地波雷达CFAR检测结果的直接验证方法。该方法将有效的AIS信息转换到地波雷达的距离-多普勒谱中,通过在该谱中AIS信息与CFAR检测结果的关联分析,实现CFAR检测结果的直接评价。论文首先给出了方法的原理和处理流程,然后利用实测数据给出了该方法在CFAR检测结果评价中的实际应用,验证了方法有效性,而且该方法也为低可观测目标的CFAR检测提供了参数优化调整的依据。
地波雷达;CFAR验证;AIS;距离-多普勒谱
1 引言
地波雷达(HFSWR)[1—2]利用垂直极化高频电磁波沿海面绕射传播(地波模式)的特性,能够对海面目标实现超视距连续探测,已成为海洋遥感、遥测的一种重要手段。在对采集的原始海洋回波数据进行信号解调和相干积累处理后,形成距离-多普勒二维谱图[3]。地波雷达通常在该谱图中进行船只目标检测,采用恒虚警(CFAR)[4—5]的检测方法。该类方法通过参考窗单元估计噪声大小获得检测门限,能够在扰动的噪声或杂波背景中检测目标并可保持较小的虚警率。为了评价CFAR检测的效果,需要有相应的验证方法。目前CFAR检测验证方法主要有基于目视解译的直接验证和间接验证两大类。其中,目视解译的直接验证方法具有直观、利于分析检测背景的特点。这种方法在目标回波信号较强时,能够正确识别出大部分的目标,对CFAR检测的评价相对准确。但是在目标回波较弱时,由于受到周边杂波和噪声的影响,导致目标可观测性差,目视解译方法存在主观上的误判。此时,无法对CFAR检测结果进行客观的评价。因此,目标处于低可观测性情况下的检测结果验证是衡量CFAR检测方法是否准确的关键,需要有观测海域内船只目标的真实数据的验证。
船舶自动识别系统(AIS)[6]是一种诞生于20世纪90年代的新型数字助航系统。配备AIS的船只通过甚高频频道周期性地广播自身的位置、航速、航向等动态信息以及船舶MMSI编号、船名、船长、船宽等静态信息。AIS数据信息丰富、准确,经过处理后可以得到海面船只目标的实际点迹和航迹分布情况。目前基于AIS的探测结果验证[7—10]主要是利用AIS信息评价在地理坐标系下的地波雷达点迹或航迹探测结果。在上述过程中,需要在CFAR检测后又经过目标测向来实现目标的定位,然后在地理坐标系中与AIS等实测数据进行关联验证,本质上仍是对地波雷达系统探测结果的验证,属于利用AIS信息间接评价CFAR检测结果的手段。该间接的验证方法容易受地波雷达测向误差的影响,且不能直观地评价CFAR检测的性能及发现CFAR存在的问题。
本文提出了将AIS信息投影到地波雷达距离-多普勒谱中来直接评价CFAR检测结果的方法。文中首先给出了基于AIS信息的地波雷达CFAR检测验证的方法原理,详细介绍了流程中的关键步骤的实现过程。然后利用实测数据验证方法的有效性,并对低可观测目标的检测个例进行了分析。最后总结了本文的工作。
2 方法原理与流程
地波雷达利用高频电磁波沿海面传播的原理,实现船只目标的超视距探测,具有观测时间长、探测范围大的特点。与传统的微波雷达相比,地波雷达的目标定位精度较低,其主要原因是受天线孔径的限制所导致的低测向精度引起的。但由于采用了长时间的数据积累,地波雷达对目标的测速精度较高,综合高精度的速度(多普勒)信息和较高精度的距离信息,可以确定一个明确的目标,因此可以直接利用AIS在距离-多普勒谱进行CFAR检测结果的验证。
利用AIS 信息在地波雷达距离-多普勒谱中实现CFAR检测结果评价验证,首先需要将AIS数据与地波雷达在时间上同步,在空间上匹配,将选择的AIS数据集中的船只位置信息转换到地波雷达距离-多普勒谱中;然后在地波雷达谱图中将CFAR检测结果与AIS船只信息进行关联,最终利用观测的数据来评价CFAR实际检测率和漏检率。方法流程如图1所示。

图1 基于AIS信息的CFAR验证方法流程Fig.1 Flowchart of CFAR verification method based on AIS
2.1 数据集选择
地波雷达CFAR检测结果的验证首先要选取用于评价的AIS数据。在数据集选择时,需要将AIS数据与地波雷达数据进行时间上的同步,然后筛选出地波雷达探测区域的AIS数据。由于地波雷达船只探测通常为阵列接收的形式,可形成特定指向的接收波束,该波束覆盖的地波雷达目标的有效探测区域决定了需保留的AIS角度范围。该角度范围与地波雷达的阵列布局和天线方向图函数密切相关。
地波雷达接收天线阵列可以等效为个阵元的均匀线阵,阵元间距为d。在x、y轴构成的平面内,以左端阵元1为参考点,表示空间来波方位θ。接收阵布局如图2所示。

图2 地波雷达接收阵布局Fig.2 Layout of HFSWR receiving array
该地波雷达阵列采用波束形成技术对空间来波入射方向同相叠加,从而实现该方向的最大能量接收。通过改变波束指向可以形成各个方向的接收波束,实现回波信号的空间划分。该阵列的方向图函数可以表示为:
(1)

海面回波在经解调和相干积累后,由式(1)方向图形成特定波束指向的距离-多普勒二维谱。在该谱图上的CFAR检测结果输出格式为:

(2)
AIS数据包含目标船只标示号(MMSI)、经纬度、时间、航速、航向等信息,经处理提取关键信息后输出格式为:

(3)
观察式(2)、(3)可知,AIS数据和地波雷达CFAR数据间首先需进行时间同步。时间同步的AIS信息需根据式(1)地波雷达波束划定的波束方位空间,保留与该空间相对应的信息。但是,由于船只AIS信息的发送周期随船只运动状态变化[6],需要对AIS数据进行插值处理,实现与地波雷达数据的时间同步。采用线性插值的方法,得到与地波雷达数据时间同步的经度Loni、纬度Lati:
(4)
式中,Lon1、Lat1,Lon2、Lat2分别为AIS数据时间t1和t2相对应的经度、纬度;ti为地波雷达数据时间。
2.2 坐标变换
地波雷达谱图的坐标为距离和多普勒,所以在该谱图上定位AIS信息需利用式(3)中的经度、纬度、航速和航向信息进行一定的坐标转换。首先,利用AIS船只经纬度和地波雷达接收阵的经纬度,通过常规的地球球体大圆表面距离计算方法得到两点间间距,确定了船只目标相对于地波雷达接收阵的径向距离,单位转换为km。然后,利用AIS的船只航向通过余弦函数将航速投影到相对于地波雷达接收阵列的径向航速,单位转换为km/h。由于地波雷达横坐标为多普勒,因此需结合地波雷达工作频率将径向航速转换为多普勒,单位为Hz。计算方法如下:
(5)
式中,fd为多普勒频率;Vr为相干积累时间;f0为雷达工作频率;c为光速。
2.3 数据关联
地波雷达CFAR检测结果与AIS信息的关联,旨在挑选出与AIS船只信息相关联和非关联的CFAR检测结果。利用相关联的船只数量统计结果来评价CFAR检测率,统计没有关联上的船只数量来评价漏检率。
CFAR检测结果与AIS在谱中检测关联时,需要确定多普勒门限fT和径向距离门限RT。门限值的设置需综合目标的运动状态和地波雷达系统的探测分辨力设定。其中,多普勒分辨力由雷达相干积累时间决定,门限值通常要稍高于多普勒分辨力;距离分辨力由系统信号带宽决定,门限值不超过距离分辨力。数据关联时满足:
(6)
式中,fHF、RHF分别为地波雷达的多普勒频率和距离;fAIS、RAIS分别为AIS的多普勒频率和距离。
当有多个目标满足式(6)时,取广义间距的最小值决定关联的目标,广义间距计算公式为:
(7)
2.4 评价分析
CFAR检测结果的评价分析包括计算船只目标的检测率和漏检率。通过与AIS信息的比对验证,得到相关联的船只检测数量和漏检的船只数量,获得相应的检测率和漏检率。检测率计算公式为:
(8)
漏检率计算公式为:
(9)
式中,Nmatch为关联检测次数;Nmiss为非关联次数;NAIS为谱图内的AIS船只数量。
3 实测数据验证与分析
3.1 实测数据验证
本文使用的地波雷达工作频率为4.7 MHz,8阵元接收,阵元间距为14.5 m。天线阵由全向天线构成。来自海面探测区域的回波经距离解调、频域处理后得到全向距离-多普勒谱。图3为未进行波束形成的全向地波雷达距离-多普勒谱,对噪声区、海杂波区、电离层杂波区以及地杂波区进行了标注。可见,海杂波、地杂波在距离和多普勒向均有展宽,尤以距离向延展最为显著;电离层杂波分为上下两层,上层杂波在多普勒向展宽严重,而下层在距离和多普勒向均有明显延展。
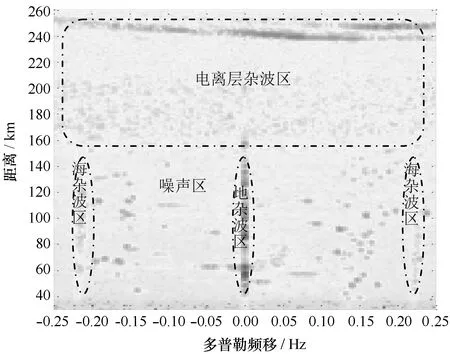
图3 地波雷达距离-多普勒谱Fig.3 Range-Doppler spectrum of HFSWR
为了增加特定方位的信噪比,提高目标探测率,需利用波束加权形成具有指向性的距离-多普勒谱,然后进行CFAR船只目标检测。图4给出了采用20 dB切比雪夫加权,波束指向为0度的方向图。考虑到中心波束对指向周边的船只目标幅度虽有一定程度的降低,但CFAR仍有可能将其检测到,所以选择投影到地波雷达距离-多普勒谱的AIS空间范围时,需选择在一定案范围内的有效数据,才能合理的评价CFAR的检测结果。在综合考量增益损失(选择较小的)和旁瓣(降低)的影响后,取幅度加权值高于-20 dB相对应的空间(图4中用虚线标出),即-35°到35°,该空间内对应的AIS船只目标应该在0波束的谱中有可观测的回波信号。

图4 空间波束图Fig.4 Directional beam pattern
图5为空间波束加权后0波束的距离-多普勒谱,给出了一个利用单元平均恒虚警检测方法(CA-CFAR)检测的例子。检测结果用圆圈标出,匹配的AIS船只位置信息以十字星标出。经统计,共获取有效AIS数据106条,关联上46条,整体检测率为43.4%。其中位于地波雷达噪声区的AIS数据有66条,位于杂波区的40条。在噪声区,CFAR检测结果与船只AIS关联41条,检测率为62.12%。在杂波区,CFAR检测结果与船只AIS关联5条,探测率为12.5%。噪声区探测率明显高于杂波区。而漏检率噪声区为37.88%,杂波区高达87.5%。

图5 地波雷达主波束检测结果Fig.5 Detection results within main beam pattern of HFSWR
3.2 低可观测目标检测验证分析
低可观测目标指船只目标的回波强度低于周边背景噪声或杂波,极易导致目标被CFAR漏检。而对这部分船只目标的检测能力,往往对CFAR检测性能影响很大。本节根据噪声区和杂波区内的低可观测目标的检测情况分别选取个例进行分析。
在噪声背景区,如图6a所示,CFAR检测到在120 Km,多普勒频移0.031 Hz处有船只目标出现。由于该处目标回波幅度与噪声背景接近,所以通过目视解译的方法,难以判断。通过AIS信息的关联,可以确认CFAR检测结果正确。图6b给出了多普勒截面图,船只目标峰值位置用竖线标出,回波幅度-75.3 dB,CFAR成功检测的原因为目标幅度虽与邻近的噪声尖峰相当,但周边并无连续的高于其回波幅度的噪声。而6c中,位于114 km,0.068 Hz处的船只没有被CFAR检测到。分析原因应该是由于邻近的0.082 Hz处的强目标回波,抬高了CFAR检测的门限,导致漏检。

图6 噪声区地波雷达低可观测目标检测个例Fig.6 Case of low observable target detection within noise area

图7 海杂波区地波雷达低可观测目标检测个例Fig.7 Case of low observable target detection within sea clutter area
在海杂波区内,图7a中返回AIS信息的船只目标位于距离69 km,多普勒频移0.23 Hz。该船只被CFAR算法检测到,需结合海杂波频移特性分析原因。理论上,无海流影响的海杂波一阶峰的多普勒频移为正、负0.221 1 Hz(在图7b中用虚线标出)。存在海流时,一阶峰位置会产生偏移,不含目标的负一阶峰偏移量为0.002 Hz,而含目标的正一阶峰偏移量为0.01 Hz。这表明目标回波的叠加使得海杂波峰值位置与海流引起的多普勒频移明显不同,且峰值有所增强,因此CFAR成功检测。目标没有被检测到的情况如图7c所示,AIS船只目标位于距离92 km,多普勒频移-0.213 6 Hz。图7d为多普勒截面,正负一阶峰偏移量均为0.005 Hz。目标回波几乎没有导致海杂波峰值位置产生变化,海杂波峰值也较弱,导致CFAR检测失败。在该区域需对CFAR参数进行有针对性的调整,改变取值窗的宽度,降低检测阈值。
4 结论
本文提出了一种将AIS信息匹配到实测地波雷达距离-多普勒谱检测背景中,实现CFAR检测分析与验证的方法。采用同步AIS信息对地波雷达实测数据CFAR检测结果进行关联验证,给出了船只目标总体检测率和噪声区、杂波区内的检测率。分析了CFAR对于低可观测目标及处于海杂波区内的船只目标的检测能力。结果表明本文方法是一种有效的CFAR船只目标检测的直接分析与验证方法。此外,该方法能够在距离-多普勒谱中定位无法确认的低可观测目标,为CFAR检测该类目标提供参数优化调整的依据。针对海面船只目标回波在地波雷达距离-多普勒谱中所表现出的面目标特性,将来可以研究利用船只AIS的运动信息在地波雷达谱中构建出相应的面目标,通过面与面的关联匹配,改进本文的方法。
[1] Abramovich Y,Ellard R M,Lyudviga Y,et al. Surface wave radar: U.S. Patent 7,145,503[P]. 2006-12-5.
[2] Liu Y T,Xu R Q,Zhang N. Progress in HFSWR research at Harbin Institute of Technology[C]. International Radar Conference,September 2003,Australia: 522—528.
[3] 钱文振,纪永刚,王祎鸣,等.一种改进的地波雷达邻近距离单元格一阶海杂波对消方法[J].海洋科学进展,2013,31(1):138—144.
Qian Wenzhen,Ji Yonggang,Wang Yiming,et al. An improved first order sea clutter cancellation method of adjacent range cell for HFSWR[J]. Advances in Marine Science,2013,31(1):138—144.
[4] 孟祥伟,关键,何友. 超视距雷达中的目标检测问题[J]. 宇航学报,2004,25(3):273—276.
Meng Xiangwei,Guan Jian,He You. Target detection problems in over-the-horizon radar[J]. Journal of Astronautics,2004,25(3):273—276.
[5] 杨强,刘永坦. 复杂背景下的二维检测研究[J]. 系统工程与电子技术,2002,24(1):34—37.
Yang Qiang,Liu Yongtan. 2-D Detection in Complex Background[J]. Systems Engineering and Electronics,2002,24(1):34—37.
[6] 王作超,郭万海,周京航,等. AIS 在地波雷达使用规律中的应用[J]. 舰船科学技术,2010 (10): 70—72.
Wang Zuochao,Guo Wanhai,Zhou Jinghang,et al. The application of AIS in the study of rule for the OTHR[J]. Ship Science and Technology,2010 (10): 70—72.
[7] Dzvonkovskaya A,Rohling H. HF radar performance analysis based on AIS ship information[C]. IEEE Radar Conference,May 2010,Washington,DC: 1239—1244.
[8] Salvatore Maresca. Performance Assessment of HF-Radar Ship Detection[C]. Radar Symposium,September 2011 Leipzig:131—136.
[9] Ponsford A M,D’Souza I A,Kirubarajan T. Surveillance of the 200 nautical mile EEZ using HFSWR in association with a spaced-based AIS interceptor[C]. IEEE Conference on Technologies for Homeland Security,May 2009,Boston,MA: 87—92.
[10] Ji Y G,Zhang J,Meng J M,et al. Point association analysis of vessel target detection with SAR,HFSWR and AIS [J]. Acta Oceanologica Sinica,2014,33(9): 73—81.
CFAR ship detection verification method of HFSWR based on range-Doppler projection of AIS data
Wang Yiming1,2,Zhang Jie1,2,Ji Yonggang1,2,Chu Xiaoliang1
(1.FirstInstituteofOceanography,StateOceanicAdministration,Qingdao266061,China; 2.OceanicTelemetryEngineeringandTechnologyResearchCenter,StateOceanicAdministration,ChinaAerospaceScience&IndustryCorp,Qingdao266061,China)
Constant False Alarm Rate (CFAR) detection is the main method used in the ship detection of High Frequency Surface Wave Radar (HFSWR). The present Automatic Identification System (AIS) based verification methods of CFAR results is an indirect method,which are subject to the influence of the direction estimation error and lack of the ability of analyzing the situations of false target and miss detection. In this paper,we introduced a direct method to evaluate the CFAR ship detection results of HFSWR based on range-Doppler projection of AIS data. The AIS data were converted and presented on the range-Doppler spectrum of HFSWR. These information were then associated with the CFAR results to facilitate direct evaluation. The principle and procedure of our method were introduced in detail,and the practical applications in CFAR results of field data were provided. It was demonstrated to be an effective verification method. Moreover,it could contribute to the parameter adjustment of CFAR in detection of low observable targets.
HFSWR;CFAR verification;AIS;range-Doppler spectrum
10.3969/j.issn.0253-4193.2015.04.007
2015-01-05;
2015-02-05。
中央级公益性科研院所基本科研业务费专项(0213T03);海洋公益性行业科研专项(201505002)。
王祎鸣(1981—),男,山东省招远市人,助理研究员,从事超视距雷达海洋探测研究。E-mail:467744980@qq.com
TN95
A
0253-4193(2015)04-0076-07
王祎鸣,张杰,纪永刚,等. 基于AIS距离-多普勒投影的地波雷达CFAR检测验证方法[J]. 海洋学报,2015,37(4):76—82,
Wang Yiming,Zhang Jie,Ji Yonggang,et al. CFAR ship detection verification method of HFSWR based on range-Doppler projection of AIS data[J]. Haiyang Xuebao,2015,37(4):76—82,doi:10.3969/j.issn.0253-4193.2015.04.007
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
牡丹(2021年11期)2021-07-20 06:02:34
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
舰船科学技术(2015年8期)2015-02-27 15:38:51
现代防御技术(2014年6期)2014-02-28 18:26:39