
基于HART通信协议的智能阀门定位器设计
2015-06-12 12:32吴宁胜
自动化仪表 2015年6期
吴宁胜
(浙江商业职业技术学院,浙江 杭州 310053)
基于HART通信协议的智能阀门定位器设计
吴宁胜
(浙江商业职业技术学院,浙江 杭州 310053)
阀门定位器是与气动控制阀配套使用的现场仪表。为了提高定位器的控制性能,以AVR单片机为核心,设计了基于HART通信协议的智能阀门定位器。给出了详细的原理框图和软硬件设计方案,研究了两线制总线供电、低功耗设计、阀位控制算法、HART通信接口等技术问题。该设计实现了阀门定位器的智能化、数字化和网络化,具有广阔的应用前景,对相关产品的研制有重要的指导意义。
智能阀门定位器 总线供电 低功耗 PID控制 积分分离 HART协议
0 引言
阀门定位器是与气动控制阀配套使用的现场仪表,用于实现温度、流量、压力等过程变量的控制,其广泛应用在石化、电力、冶金、轻纺等自动化行业[1]。传统的阀门定位器是基于机械力平衡的仪表,存在精度低、调试难、故障率高、控制不灵活等诸多缺点。随着计算机和网络技术在工业过程控制领域的应用, 以微处理器技术为基础的智能阀门定位器能克服上述缺点,正逐步取代传统阀门定位器[2]。
本文以AVR单片机为核心,设计了基于HART通信协议的智能阀门定位器。该定位器既可传输模拟信号,也可传输现场总线的数字信号,实现与控制中心的信息交互。该设计无需更改原有控制系统架构与工程布线,可直接连接智能阀门定位器,实现网络化控制和管理,为工业4.0提供有效手段。同时,它采用总线供电,较好地解决了阀门定位器的本安防爆问题。
1 工作原理与总体设计
基于HART通信协议的智能阀门定位器原理框图如图1所示[2-4]。

图1 智能阀门定位器原理图Fig.1 Schematic diagram of the intelligent valve positioner
图1中,超低功耗电源电路将4~20 mA电流信号转换成电压信号,为HART通信接口电路、控制信号取样电路、MCU控制单元、I/P转换单元、阀门位置检测电路提供稳定的工作电压。控制信号取样电路完成控制信号的采样。人机交互模块主要显示控制阀的工作状态和输入工作参数。MCU 控制单元将阀门位置反馈电路检测的阀位信号与控制信号取样电路提供的设定值信号进行比较,对偏差信号进行一定的控制算法运算,包括流量特性的修正补偿,运算输出驱动I/P电气转换及放大单元工作,从而实现被控阀的动作。HART通信接口电路实现MCU控制单元与外界的数据转换。
2 硬件电路设计
2.1 电源电路
基于HART通信协议的智能阀门定位器为二线制设计,与外部的连接只有两条物理连线。4~20 mA电流信号既是给定的阀门位置目标控制信号,也是整个定位器硬件电路正常工作的电源[5]。因此,电源电路的设计是整个系统设计的基础和关键。电源电路如图2所示。

图2 电源电路原理图Fig.2 Schematic diagram of the circuit of power supply
电源电路设计的关键是从4~20 mA模拟电流信号摄取合格的电源。4~20 mA电流信号经过抗干扰滤波电路、线性稳压电路后产生低纹波系数的直流6.6 V电压。线性稳压电路决定了定位器从控制信号摄取的最小功率为26.4 mW(6.6 V×4 mA),最大功率为132 mW(6.6 V×20 mA)。因此,后续各单元电路的设计必须将低功耗作为首要考虑的因素。考虑到定位器正常工作的电流为3.5 mA,单片机、阀门位置反馈、取样电路和HART通信接口单元的供电均统一通过电荷泵(而非低压差LDO模块),将6.6 V转换成3.3 V电压,最大限度地提高电源转换效率。同时,6.6 V电压通过DC-DC升压电路升压至24 V,为I/P电气转换单元供电[6]。
2.2 微控制器MCU单元及人机接口
根据电源电路部分的论述和设计,常用的MCU正常工作电流都在10 mA以上,无法满足要求。因此,选择超低功耗微控制器是本单元设计的关键。
需指出的是,本低功耗设计与电池供电系统中的低功耗设计有较大区别。电池供电系统中低功耗设计的目的是实现电池的最长时间供电,设计依据是长期的功耗指标(或用平均功耗),所以,关注点是微控制器在空闲和休眠模式时的最小工作电流。而智能阀门定位器是一个实时工作系统,低功耗设计的目的是保证微控制器正常工作电流不超过电源电路分配的最大值,设计依据是瞬时的正常功耗。本设计采用基于AVR内核的8位低功耗控制器ATMEGA644PV。它具有多种低功耗模式;在1 MHz、1.8 V低电压工作条件下,正常工作电流为0.4 mA,能很好地满足系统设计要求。
LCD液晶显示和4个按键是定位器人机信息和数据交互的窗口,可以完成参数的初始值设置、数据组态及实时显示等诸多功能。
2.3 控制信号取样与阀门位置反馈电路
控制信号取样电路如图3所示。

图3 控制信号取样及放大电路图Fig.3 Circuitry of the control signal sampling and amplification
本单元电路采用低端检测法,串联一个低温漂特性(温度系数25×10-6)的线性检流电阻R1,摄取与控制信号具有近似线性关系的电压。该电压通过反向放大电路调理后,送入A/D转换器和微处理器进行采样与数据处理。
图3中,U1B为超低功耗满摆幅运放,R11、R12为低温漂精密电阻。这里R11、R12的取值不能过小,否则会造成不可忽略的取样误差。
阀门位置反馈电路的任务是阀门阀杆的实时位移检测。本设计采用高精度线性电位器作为反馈主要部件,将阀门位置转换为电位器的转角,并输出对应的电压信号,经过A/D转换后送微处理器。
2.4I/P转换单元
I/P转换单元的作用是将微控制器MCU输出的电信号转换成气动信号,以驱动控制阀阀杆移动。基于压电效应的I/P转换单元,只需提供足够电压便能正常工作,其电流几乎为零,特别适合对功耗有严格要求场合的应用。同时,它能接收较高频率的控制信号,可直接对接微处理器中常见的PWM模块,在智能电气阀门定位器中得到了广泛应用[6]。本文设计的智能阀门定位器使用OEM厂家提供的压电阀式I/P转换模块,极大地提高了产品的稳定性。
2.5 HART通信接口电路
HART协议用于现场智能仪表和主机设备之间的双向通信。它是在4~20 mA模拟信号上叠加正弦调制信号,实现数字通信,数据率为1 200 bit/s。数字信号“1”调制成频率为1 200 Hz的信号,“0”调制成2 200 Hz的信号。数字信号幅度为0.5 mA,平均值为0。只要在原有模拟信号电路上增加相应滤波器,就不会对原有模拟信号产生干扰[7]。HART通信接口电路如图4所示。
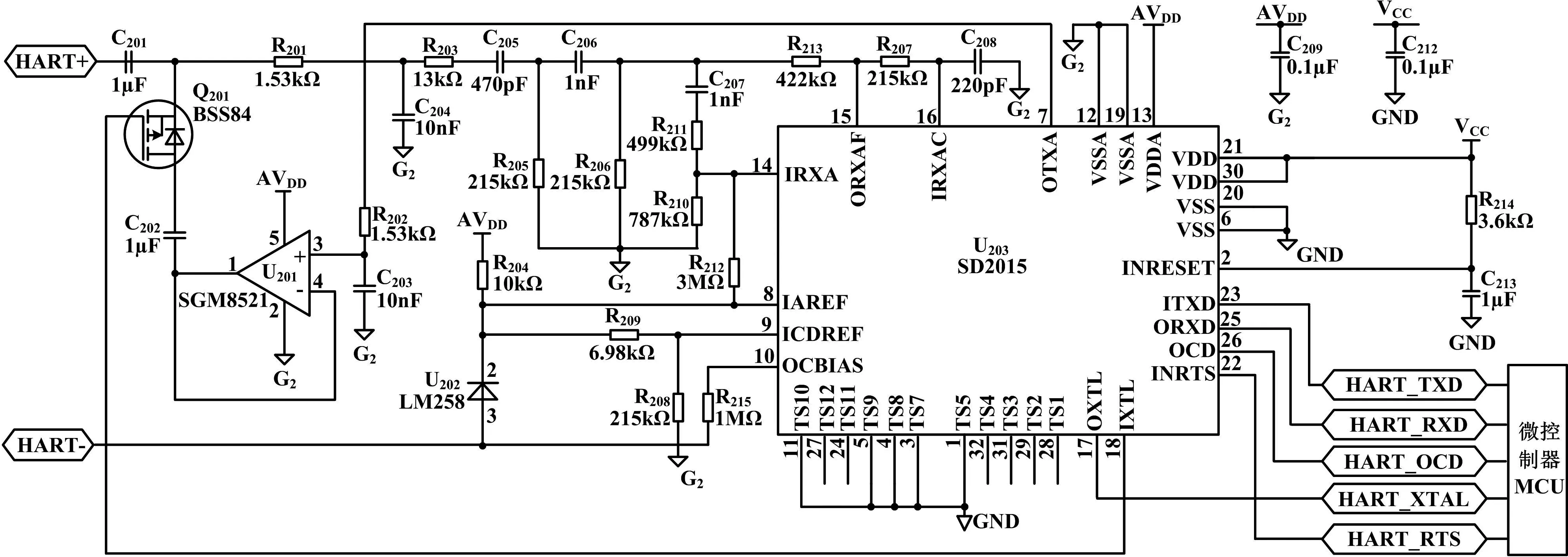
图4 HART通信接口电路Fig.4 The HART communication interface circuit
HART通信接口电路主要由HART Modem、发送驱动和发送/接收转换等构成。HART Modem内部集成符合Bell202标准的调制器、解调器、接收滤波器、发送信号整形电路、载波检测等电路,简化了接口电路设计,使系统更具可靠性。该芯片载波信号输出功率有限,为此,本设计特别增加由运放U201构成的载波发送驱动电路,较好地满足了通信网络低阻抗情况下的可靠通信。HART通信是一种半双工通信模式,因此本设计还配置了发送/接收转换电路。HART Modem芯片需要460.8 kHz时钟源,但460.8 kHz晶振是非标准的,不容易购买到。本设计中,设置微控制器的PWM模块工作于CTC模式,经软件编程分频即可得到460.8 kHz时钟信号。该方法有很好的灵活性,降低了成本。
3 软件设计
本文研制的智能阀门定位器程序采用模块化结构设计,主要由数据采集、控制、人机交互、通信和系统初始化等部分组成。数据采集程序完成控制电流与阀位的实时采样、转换和数字滤波等任务。控制程序主要是控制算法的具体实现。人机交互程序主要完成LCD显示、用户按键处理、故障分析与报警。通信程序完成HART通信协议的数据打包与解包、命令的解析等任务。系统初始化程序的任务是微处理器I/O与外围芯片初始化、重要数据存储与掉电保护设置等。软件设计的核心与关键环节是控制程序与HART通信程序。
3.1 控制程序
不同规格的气动控制阀,其特征参数差异较大,非线性和大滞后是其标志性的特点[8-9]。经过多次试验,本文选择积分分离PID算法来取得较好的控制特性。本算法的基本思想是:根据设定值与反馈值的误差e来确定执行器膜头进气还是排气。根据e的绝对值大小采用不同的控制策略。当误差e大于规定值时,微控制器切除积分项,PWM输出脉宽较大,阀位快速向设定值靠近;当误差e小于规定值时,微控制器引入积分项,PWM输出脉宽逐渐收窄,阀位缓慢接近设定值,直到误差e低于设定死区,PWM不再输出信号,阀门位置保持不变[10]。
为适应应用要求,还设置流量特性补偿环节,用多段折线实现非线性补偿。
3.2 HART协议通信程序
HART协议通信是一种半双工通信模式,由主控设备(上位机)发通信请求,智能阀门定位器作为从机响应。根据ISO的OSI参考模型,HART协议分物理层、数据链路层和应用层。物理层涉及硬件接口;数据链路层规定了波特率1 200 bit/s、1位起始位、8位数据位、1位奇校验位、1位停止位以及数据帧的格式与校验等内容;应用层则对各种命令代码作统一的规范。
依据HART协议的通信格式,可以计算出传送一个字符的时间大约9 ms。如果采用延时等待连续发送的方式,一帧长数据就可能需要消耗0.5~1 s的CPU时间,控制的实时性无法保证。因此,HART协议通信程序设计的关键是每一个字节数据的收发都必须采用中断方式实现。中断程序流程图如图5所示。

图5 HART收/发中断程序流程图Fig.5 Flowchart of HART Rx/Tx interrupt program
在接收中断程序中,定位器对上位机数据帧进行识别和判断,判断依据是接收到的前导符0xFF个数以及字符间隔是否超时(超时,则触发定时器溢出中断,一帧数据接收完成)。发送中断程序则是将已传入发送缓存的数据逐个发送。接收数据帧的解析及发送数据帧的打包在主程序中实现。
4 结束语
本文以超低功耗AVR单片机ATMEGA644PV为核心,设计了基于HART通信协议的智能阀门定位器,实现了气动阀门定位器的智能化、数字化和网络化。实际应用表明, 该系统具有使用简单、可靠性高、功能更加完善、适应性好等特点。经测试,系统定位精度可以达到阀门最大行程的±0.5%。
[1] 李倩如,赖庆峰,毛晓明,等.HART协议的智能阀门定位器的设计和实现[J].自动化仪表,2010,31(6):55-57.
[2] 李鸣,周天龙,黄晓刚.基于PROFIBUS-DP的智能阀门定位器设计[J].仪表技术与传感器,2011(2):71-73.
[3] 蔡明,白雪莲,章英.国产新型智能阀门定位器的设计[J].自动化仪表,2011,32(7):73-75.
[4] 李颀,栾翔鹤.智能阀门定位器的研究与开发[J].化工自动化及仪表,2010,37(4):64-66.
[5] 张智亮,鲜海波.基于HART协议的智能电气阀门定位器研制[J].电工电气,2010(2):15-17.
[6] 卢桂荣.基于MSP430单片机的智能阀门定位器研究[D].南京:南京理工大学,2011.
[7] 李春丽,李巍.基于HART协议的智能仪表通信电路设计[J].单片机与嵌入式系统应用,2013(5):24-26.
[8] 杨庆庆,徐科军,任保宏,等.变PWM占空比的压电式阀门定位器控制方法[J].电子测量与仪器学报,2014,28(4):424-432.
[9] 胡小玲,徐科军,杨庆庆,等.压电比例式阀门定位器的控制方法研究[J].电子测量与仪器学报,2011,25(11):978-983.
[10]刘海成.AVR单片机原理及测控工程应用[M].北京:北京航空航天大学出版社,2008.
Design of the Intelligent Valve Positioner Based on HART Protocol
Valve positioner is one of the field instruments supporting the use of pneumatic control valves. In order to enhance the control performance of the positioner, the intelligent valve positioner based on HART communication protocol has been designed with AVR single chip computer as the core. Detail schematic block diagram and design scheme of hardware and software are given. Several technical issues including two-wire bus power supply, low power consumption design, valve position control algorithm and HART communication interface, etc., are researched. The design realizes intellectualization, digitization and networking of the valve positioners; it possesses broad application prospects and important guiding significance for the development of related products.
Intelligent valve positioner Bus power supply Low power consumption PID control Integral separation HART protocol
浙江省教育厅科研基金资助项目(编号:Y201018912)。
TH863
A
10.16086/j.cnki.issn1000-0380.201506025
修改稿收到日期:2015-01-09。
作者吴宁胜(1978-),男,2004年毕业于桂林电子工业学院机械制造及其自动化专业,获硕士学位,讲师;主要从事机电技术、自动化控制、智能仪表等方面的研究。
猜你喜欢
仪器仪表用户(2022年2期)2022-02-18
科技创新导报(2021年33期)2021-04-17
铁道通信信号(2020年6期)2020-09-21
中国信息化周报(2020年15期)2020-05-11
汽车文摘(2017年6期)2017-12-06
汽车文摘(2017年9期)2017-12-06
小学生作文选刊·低年级版(2017年4期)2017-06-07
电子制作(2017年1期)2017-05-17
专用车与零部件(2016年1期)2016-12-10
中国高新技术企业(2015年23期)2015-06-24
