
船用惯导双平台双位置海上启动方法
2015-06-05 09:33:13邹铁军艾光彬张礼伟
中国惯性技术学报 2015年5期
邹铁军,艾光彬,姚 琪,张礼伟
(1. 中国人民解放军92941部队95分队,葫芦岛 125001;2. 天津航海仪器研究所,天津 300131;3. 海军驻天津航海仪器研究所军事代表室,天津 300131)
船用惯导双平台双位置海上启动方法
邹铁军1,艾光彬2,姚 琪2,张礼伟3
(1. 中国人民解放军92941部队95分队,葫芦岛 125001;2. 天津航海仪器研究所,天津 300131;3. 海军驻天津航海仪器研究所军事代表室,天津 300131)
针对平台式惯导系统海上动态启动时传统的罗经对准方法和传递对准方法的缺点,提出了一种双平台双位置海上启动方法。粗对准阶段以牵引惯导提供的姿态角作为水平和航向基准通过伺服回路完成粗水平调平和粗方位对准。精对准阶段建立了双位置下的卡尔曼滤波方程,实现了东向陀螺漂移的估计补偿,解决了海上启动时对舰船匀速直航的限定条件。仿真结果表明,相比传统的海上启动法,在0.01 (°)/h的东向陀螺漂移的情况下方位失准角的估计误差由2′减小到0.5′左右。
平台式惯导系统;海上启动;双平台双位置;速度匹配
船用惯性导航系统应具备海上启动的功能,当系统因故障或检修等原因关机后可以在舰船航行的条件下重新启动,并能达到一定的对准精度以保证后续任务的完成。
传统的海上应急启动方案与码头应急启动方案一样,采用罗经效应自对准法,在对准期间要求舰船保持匀速直航,大大限制了舰船的作战适应性。
对于安装有两套或多套惯导系统的舰船来说,可以采用以已启动惯导系统信息(牵引惯导)为参考信息,利用卡尔曼滤波技术对需要对准的惯导系统(重启惯导)进行海上传递对准。平台式惯性导航系统用于海上启动的信息通常有位置、速度和姿态角等。对于使用位置和速度信息的海上启动方法,由于东向陀螺漂移和航向误差角之间的耦合关系,滤波器无法分辨出东向陀螺漂移和航向误差角,因此无法估计东向陀螺漂移,估计的航向误差中包含东向陀螺漂移成分,误差较大。虽然增加姿态信息可以提高东向陀螺漂移和航向误差角的可观测性,但由于姿态信息易受甲板变形、传递延时等的影响,估计精度也较低。
针对传统的罗经自对准法和海上传递对准方案的缺点,本文提出了一种平台双位置海上启动方法,以提高平台式惯导系统航向角的对准精度。给出了两个位置下的 Kalman滤波方程,通过仿真分析验证了该方法的有效性。
1 平台双位置海上启动方案
通过合理的机械编排,平台式惯导系统可以使平台的方位保持任意的指向。与传统的自对准方法一样, 如果在粗对准时将平台对准到“北-西-天”坐标系下,则系统的东向陀螺仪的输入轴沿南北方向,变为“北向陀螺”,此时利用速度作为观测量,则可以估计出这个“北向陀螺”(实际为系统的东向陀螺仪)的漂移。估计结束后再将平台对准到“东-北-天”地理坐标系下,利用Kalman滤波器估计出北向陀螺漂移、平台水平失准角和方位失准角,完成系统的对准。由于在“北-西-天”坐标系下已经估计并补偿掉东向陀螺漂移,因此“东-北-天”地理坐标系下估计的方位失准角的精度也可以得到提高。双位置速度匹配海上启动流程框图如图1所示。

图1 双位置速度匹配海上启动流程框图Fig.1 Block diagram of two-position transfer alignment
2 粗对准
粗对准不再使用传统的对准方式,而是以牵引惯导提供的横摇角、纵摇角为水平基准进行平台粗水平调平,以牵引惯导提供的航向角作为航向基准进行平台粗方位对准,通过伺服回路不断修正平台最终使其粗对准到指定的坐标系上。
以粗方位为例,设牵引、重启惯导测量的航向角分别为Hm和Hs,则以牵引惯导提供的航向角加 90°后的值作为航向基准,通过图2所示的二阶伺服回路对方位陀螺进行施矩修正,可将系统的平台粗对准到指西的方位。

图2 航向粗对准伺服回路方块图Fig.2 Block diagram of coarse alignment servo loop
粗对准结束后,重启惯导实现粗水平和粗方位,对准到北西天坐标系。此时系统的东向陀螺输入轴沿南北方向,变为“北向陀螺”;北向陀螺输入轴沿东西方向,变为“东向陀螺”;系统转入精对准阶段,则可通过Kalman滤波器首先估计出系统东向陀螺的漂移。
3 基于Kalman滤波的精对准
海上启动时,假定牵引惯导工作在组合状态下,认为其是无误差的,则海上启动的速度误差方程和姿态误差方程在地理坐标系下表示为[5-7]

式中:φ为平台失准角向量,fn为比力向量,Ωn为地球自转角速度沿地理坐标系的分量组成的向量,表示地理坐标系相对地球坐标系的旋转角速度沿地理坐标系的分量组成的向量;分别表示重启惯导的加速度计零位和陀螺漂移在地理坐标系内的分量,则当平台调整到东北天坐标系下对准时,而当平台调整到西北天坐标系下对准时,由于加速度计的零位误差很小,因此将加速度计零位误差视为白噪声,将陀螺漂移视为由常值漂移和随机白噪声组成,即



4 仿真结果与分析
为了分析双位置速度匹配海上启动的性能,对上述方案进行了仿真分析。仿真过程分为两步,首先进行北西天坐标系下的仿真,仿真时间为30 min,将估计的东向陀螺漂移补偿后,再进行东北天坐标系下的仿真,时间为1 h。仿真中假定子惯导系统已完成粗对准,平台水平、方位失准角都为1°,舰船的初始速度为10 kn,初始经纬度分别为117°8.5′、 39°11′。陀螺仪及加速度计的误差参数如表1所示。在北西天和东北天坐标系下的仿真结果分别如图3和图4所示。
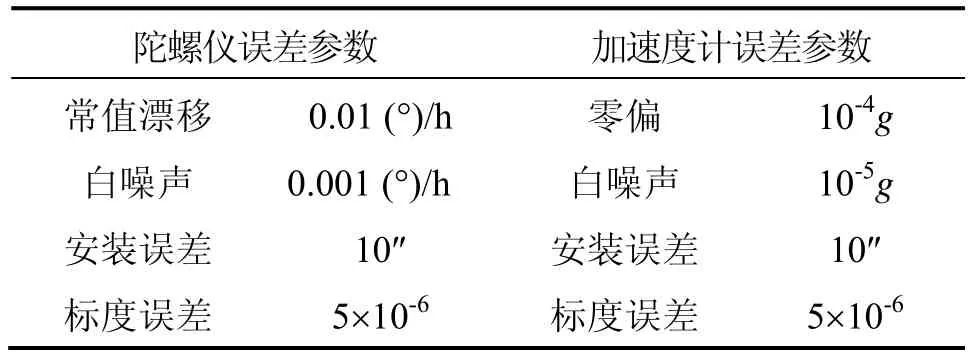
表1 陀螺仪及加速度计误差参数Tab.1 Error parameters of gyros and accelerometers
在北西天坐标系下主要是为估计东向陀螺漂移,从仿真结果可以看出,在15 min左右时东向陀螺漂移的估计误差趋于零,而方位失准角有2′左右的估计误差。
从图4可以看出,方位失准角的估计误差减小到0.5′左右,这是由于在北西天下已经估计并补偿掉东向陀螺漂移,因此提高了方位失准角的估计精度;由于加速度计零位误差的影响,两个水平失准角存在0.35′左右的估计误差;北向陀螺漂移的估计误差在15 min左右时趋于零;而由于水平速度和方位陀螺漂移之间的弱相关性,方位陀螺漂移的收敛速度较慢,大约需要1 h左右的估计时间。

图3 北西天下平台失准角及陀螺漂移估计误差曲线Fig.3 Estimation errors of platform misalignment and gyro drift (NWU-coordinate)

图4 东北天下平台失准角及陀螺漂移估计误差曲线Fig.4 Estimation errors of platform misalignment and gyro drift (ENU-coordinate)
5 结 论
由以上分析可以得到以下结论:
① 采用“双位置”速度匹配海上启动的方法,可以实现陀螺漂移尤其是东向陀螺漂移的估计,从而也提高了方位失准角的估计精度;
② 对准期间对舰船的运动没有限制,提高了舰船的作战适应性;
③ 但由于方位陀螺漂移和水平速度之间的弱相关性,这种方法在方位陀螺漂移的估计上有一定的局限性,估计时间较长。
(References):
[1] 刘红光, 陈志刚, 陈刚. 基准信息时间延迟对速度匹配海上启动性能的影响分析[J]. 中国惯性技术学报, 2012, 20(5): 544-551. Liu Hong-guang, Chen Zhi-Gang, Chen Gang. Time-delay’s effect on velocity matching transfer alignment[J]. Journal of Chinese Inertial Technology, 2012, 20(5): 544-551.
[2] 刘为任, 王宁, 刘国彬, 年海涛, 等. 一种双惯导组合导航方法[J]. 中国惯性技术学报, 2014, 22(1): 1-4. Liu Wei-ren, Wang Ning, Liu Guo-bin, Nian Hai-tao. Integration navigation method of dual INS[J]. Journal of Chinese Inertial Technology, 2014, 22(1): 1-4.
[3] 陈刚, 刘红光, 王戈, 等. 机动对速度匹配法海上启动效果的影响[J]. 中国惯性技术学报, 2010, 18(6): 653-659. Chen Gang, Liu Hong-guang, Wang Ge, et al. Maneuver’s effect on velocity matching transfer alignment[J]. Journal of Chinese Inertial Technology, 2010, 18(6): 653-659.
[4] 刘永红, 刘明雍, 谢波. 捷联惯导系统双位置快速抗干扰对准方法[J]. 中国惯性技术学报, 2014, 22(3): 296-300. Liu Yong-hong, Liu Ming-yong, Xie Bo. Rapid anti-interference method of two-position alignment of strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2014, 22(3): 296-300.
[5] You-Chol Lim, Joon Lyou. An error compensation method for transfer alignment[C]//Proceeding of IEEE Conference on Electrical and Electronic Technology. 2001, Vol.2: 850-855.
[6] Goshen-Meskin D, Bar-Itzhack I Y. Unified approach to inertial navigation system error modeling[J]. AIAA Journal of Guidance, Control and Dynamics, 1992, 15(3): 648-653.
[7] Yan Gong-min, Weng Jun, Yang Peng-xiang, Qin Yong-yuan. Study on SINS rapid gyrocompass initial alignment[C]//International Symposium on Inertial Technology and Navigation. 2010-10: 323-330.
[8] Abbas T, Zhang Yun-yan, Li Yanjun. SINS initial alignment for small tilt and large azimuth misalignment angles[C]//2011 IEEE 3rd International Conference on Communication Software and Networks. 2011: 628-632.
[9] Zhang H L, Wu W Q, et al. Improved multi-position calibration for inertial measurement units [J]. Measurement Science and Technology, 2010, 20(1): 1-11.
[10] Ramanandan A, Chen A, Farrell J A. Inertial navigation aiding by stationary updates[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 235-248.
Shipboard INS’s two-platform two-position alignment at sea
ZOU Tie-jun1, AI Guang-bin2, YAO Qi2, ZHANG Li-wei3
(1. Element 95, Unit 92941 of The Chinese People’s Liberation Army, HuLudao 125001, China; 2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China; 3. Office of Military Representatives Station in Tianjin Navigation Instrument Research Institute for People’s Liberation Army Air Force, Tianjin 300131, China)
To overcome the drawbacks of traditional gyrocompassing and transfer alignment methods, a two-position transfer alignment method based on velocity matching is put forward for shipboard platform INS. The master INS’s attitude is used to correct the slaver INS’s attitude by servo loop in the coarse alignment phase. The Kalman filter models are respectively founded for the two coordinate frames to estimate and compensate the drifts of all the gyros, especially the east gyro drift in fine alignment phase. Simulation results show that, compared with traditional methods, this method can improve the alignment accuracy of platform azimuth error from 2′ to about 0.5′ when east gyro drift is 0.01(°)/h.
platform inertial navigation system; alignment at sea; two-platform two-position; velocity matching
U666.1
:A
2015-06-10;
:2015-09-20
总装预研基金项目(51309030501)
邹铁军(1961—),男,高级工程师,从事卫星导航与舰船惯性导航技术研究。E-mail:agb-2002@163.com
1005-6734(2015)05-0561-04
10.13695/j.cnki.12-1222/o3.2015.05.001
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
测控技术(2018年2期)2018-12-09 09:00:56
当代陕西(2018年12期)2018-08-04 05:49:20
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年24期)2017-02-02 07:14:16
探测与控制学报(2015年4期)2015-12-15 15:01:00
计算机工程(2015年4期)2015-07-05 08:28:57
