基于结构低秩编码的复杂环境红外弱小目标检测算法
2015-06-05 09:33赵爱罡王宏力杨小冈陆敬辉黄鹏杰
中国惯性技术学报 2015年5期
赵爱罡,王宏力,杨小冈,陆敬辉,黄鹏杰
(第二炮兵工程大学,西安 710025)
基于结构低秩编码的复杂环境红外弱小目标检测算法
赵爱罡,王宏力,杨小冈,陆敬辉,黄鹏杰
(第二炮兵工程大学,西安 710025)
针对复杂环境红外弱小目标检测难的问题,依据背景慢变特性,提出了一种将背景优化和低秩表达相结合的结构低秩编码小目标检测算法。首先,利用梯度l0范数约束提取背景中梯度较大的成分,保留灰度快变结构,同时平滑慢变结构,对背景进行优化;其次,使用核函数刻画背景图像块之间的低秩特性,用秩描述背景的主要结构并进行建模;最后,分解得到的误差矩阵具有稀疏性,主要包含快变的小目标结构,通过稀疏矩阵l1,2范数定位红外弱小目标。实验结果表明,结构低秩编码检测算法能够有效发掘复杂背景图像块之间的关系,抑制杂波干扰,在虚警为2时,最低检测率为92%。提高了复杂环境下红外弱小目标的检测性能,基本能满足实际应用要求。
复杂环境;红外小目标;低秩表达;l0范数约束
随着科技的日益进步,精确制导技术突飞猛进,红外探测[1]因隐蔽性好、抗干扰能力强、探测距离远、可全天候工作,是精确制导技术发展的一个主要方向。其中红外弱小目标检测是关键技术,因为较远距离探测,弱小目标在图像中仅占几个像素,信息相对匮乏,并且经常淹没在海杂波和云杂波等复杂背景中,所以检测比较困难[2],成为目前学者研究的重点。
检测算法主要分为两类[3]:基于单帧的检测算法和基于序列的检测算法。序列检测常常要用到许多先验知识,比如背景的运动、目标的类型和目标的速度等,但在制导武器使用中,这些先验知识难以获取,并且有些序列检测算法依赖于单帧图像的检测结果,所以在复杂的环境下,单帧检测算法研究的较多。
近期有关单帧检测算法的文献较多,主要分为三种:第一种是滤波算法,如基于形态学的高低帽[4](Tophat, TH)检测算法,最大均值[5](Maximum Mean, MaxMean)检测算法,最大中值[5](Maximum Median, MaxMedian)检测算法等。这些滤波算法对背景进行估计,滤除高频的小目标成分,再从原始图像中将滤波成分减除,达到抑制背景突出目标的作用。在目标的局部信噪比较低,频率特性不显著的情况下,此类算法虚警率比较高。第二种是基于人眼视觉注意机制的检测算法,将目标视为场景中的显著区域,对场景进行显著性检测。文献[6]提出了改进的局部对比测量(Improved Local Contrast Measure, ILCM)算法,将小目标视为局部突亮区域,通过图像分割,与周围图像块的局部对比,突出显著性区域。文献[7]提出了二阶方向导数(Second-Order Directional Derivative, SODD)滤波器,使用小平面对背景图像建模,利用小平面模型估计中心像素与周围像素的关系,对方向进行求导,得出方向滤波器,借助傅里叶相位谱进行显著性检测,得到方向显著图,最后通过整合多方向的显著图发现并定位弱小目标。第三种检测算法是基于成分表达的,通过构造字典,发掘背景之间或目标之间的内在关系,对表示系数进行分析,从而达到检测目的。文献[8]提出了鲁棒字典学习(Robust Dictionary Learning,RDL)检测算法,通过分析背景的系数表达矩阵和弱小目标的特点,分别使用行稀疏和列稀疏对系数矩阵和误差矩阵约束,发现背景图像块之间的关系和误差矩阵中不能被稀疏表示的红外小目标。文献[9]提出了基于子空间低秩矩阵分解(Subspace Low-rank Matrix Decomposition,SLMD)的模型,将背景刻画为低秩矩阵成分,将小目标视为稀疏矩阵成分,从而对小目标进行检测。文献[10]提出了基于低秩和稀疏表达(Low Rank and Sparse Representation,LRSR)的检测模型,近一步拓展了低秩含义,将背景的表达系数视为低秩矩阵,通过构造弱小目标字典对小目标进行稀疏表达,分析系数矩阵的结构,检测弱小目标。在背景类型未知的情况下,第三种检测方法比较稳定,能够发掘背景的慢变特性。本文将背景优化和低秩表达相结合,提出了结构低秩编码(Structural Low-Rank Coding,SLRC)的检测算法。该算法对背景施加低秩和梯度l0范数约束,对误差项进行l1,2约束,能够抽取背景的主要结构和背景的低秩表达,对误差项分析,从而定位弱小目标。通过实验验证,与其他算法相比,该算法适应性强,并且能够保持较高的检测水平。
1 背景低秩编码
红外弱小目标一般隐藏在背景之中,表现为局部小块亮斑,而背景变化相对缓慢,局部相关性大,矩阵的低秩特性可以刻画其行或列之间存在线性相关性,利用这一性质对背景建模。假设实际背景即观测矩阵为,由低秩矩阵和稀疏矩阵组成,低秩矩阵表示背景,稀疏矩阵表示红外小目标和噪声,这一过程称为为鲁棒主成分分析[11](Robust Principal Component Analysis, RPCA),描述如下:
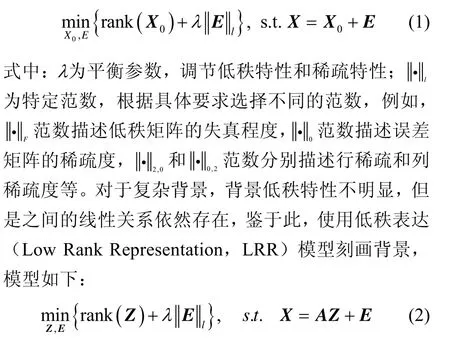
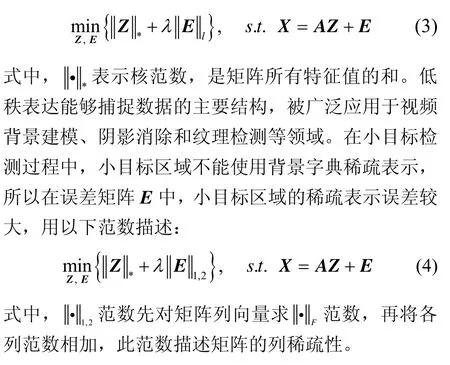
式中:A为字典,包含X的主要结构;矩阵Z为X在字典A中的表示系数,若A为单位矩阵I,则 LRR退化为RPCA问题。公式(2)是一个高度非凸优化问题,为利用成熟的凸优化算法,将条件放宽,寻找低秩的凸包代替低秩,变形如下:
2 背景主要结构
背景一般含有噪声和细微纹理,对字典的构造和低秩表达能力具有一定影响,数据主要结构集中在梯度明显的区域,即信号变化剧烈的区域,如只捕捉信号具有高对比度的结构[12],不会丢失主要细节,而且有利于数据的储存和背景的低秩表达。
2.1 一维信号建模


式(6)表明,在优化信号s中有k个非零梯度,k值越大,信号s越接近原信号g,同时按梯度大小保留了主要梯度。公式(6)与传统信号平滑操作的区别是,信号主要的梯度值保持不变,避免了中值滤波或均值滤波等对梯度幅值的影响。在应用中,k的取值需要符合图像的结构和任务需求,难以确定具体数值,所以在相似度和平滑之间折中表示,目标函数如下:

式中,ρ为调整参数。ρ越小,保留的细节少,背景越平滑;ρ越大,保留的细节越多。
2.2 二维信号建模
如果简单地将二维信号看作一维信号处理,则割裂了局部区域的相关性,结果会出现明显伪迹,故需要将式(7)扩展到二维图像进行考虑。假设F为原图像,S提取F的主要结构,梯度描述如下:

式中,p为像素位置,梯度为沿x方向导数和y方向导数组成的向量,在二维信号中,公式(5)变为

相应的目标函数(7)变形为

公式只考虑灰度图像,主要结构S通过以上公式进行估计,第一部分表示相似性,第二部分是对S梯度的约束,通过此公式估计的S能够保留图像的主要梯度结构,并且梯度幅值不衰减。
2.3 优化低秩编码
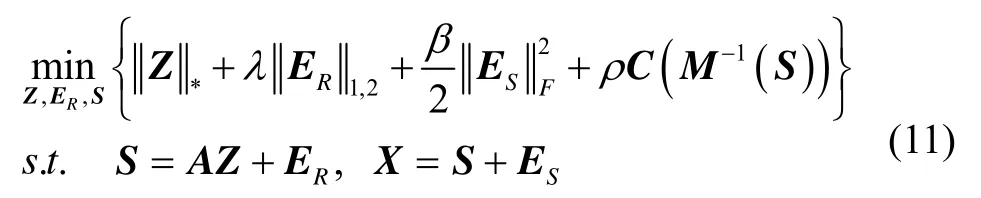
因为目标弱小和杂波较多,目标常被淹没在背景中,公式(4)表示的低秩编码中,背景成分比较复杂,稀疏误差较大,误差项E的各列范数相差不大,难以检测红外弱小目标。通过以上分析,若对背景优化,提取背景的主要结构,舍去微小波动,会使背景成分相对简单纯净,促进了背景的低秩表达,所以将
3 SLRC模型求解
模型中字典A的构造一般使用原始图像,足以对背景进行低秩表达,发现背景中的相互关系,但为避免字典包含小目标区域,需要做一些优化。本节暂将字典A作为常量矩阵求解,引进中间变量,采用交替优化方法估计最优解。式(11)变形如下:
等价以下增广的拉格朗日目标函数:

式中,Y1、Y2和Y3是拉格朗日乘子,μ>0是惩罚因子。式(13)首先固定其他变量,分别对某一变量进行求解,各变量的求解子问题均属于凸规划,具有解析解,具体算法如下:
SLRC算法:
输入:矩阵X;
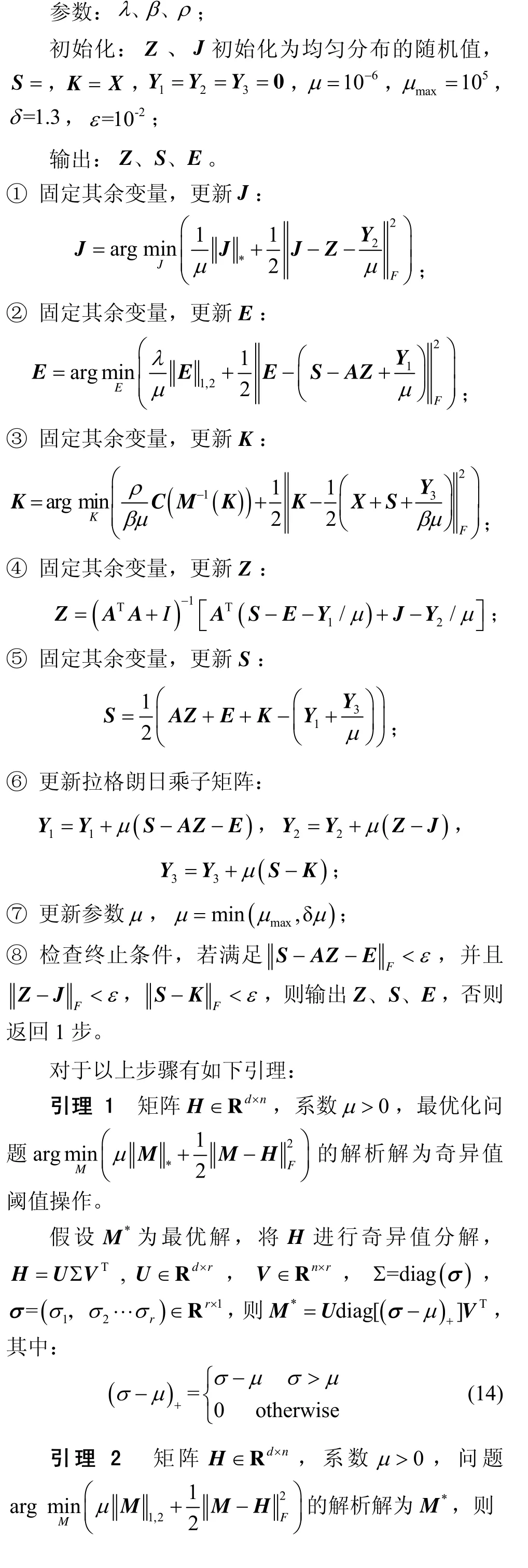
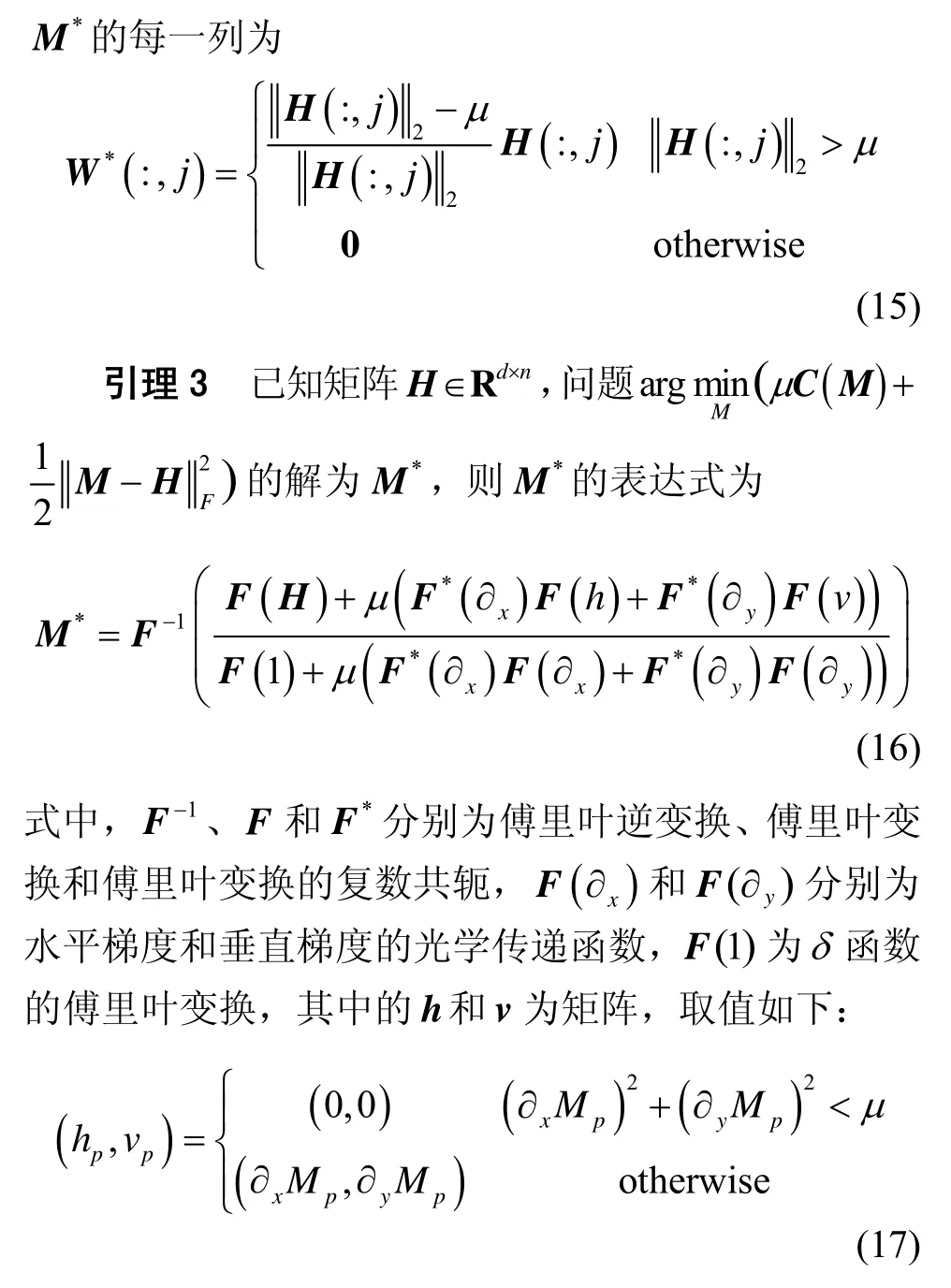
式中,p为元素的位置。至此,SLRC算法的所有步骤均可以顺利进行,最后得出背景主要结构的低秩表达和对应误差项。
4 SLRC模型检测红外小目标
红外图像一般包含背景、小目标和噪声成分,本文将红外图像进行分解,得到背景成分和误差项,根据误差矩阵的分布,计算出目标所在位置。
红外弱小目标检测主要有以下步骤:
① 数据矩阵构造。为发掘背景图像局部区域的结构关系,将图像分解为图像块,构成数据矩阵。使用滑动窗口从左向右,从上向下扫描,窗口大小一般与小目标大小匹配,设为k×k,移动步长为k/2,共得到N个图像子块,将每个子块向量化,组成数据矩阵
② 背景字典A的构造。字典应具备以下条件:1)原子冗余度小;2)在背景的低秩表达中,每个原子的参与度高;
本文首先将字典A设为数据矩阵X,在低秩表达的求解过程中,根据指标对字典优化。对于原子的冗余问题,低秩表达算法会自动将冗余的原子排除在外,只选取差异较大的原子参与低秩表达;对于原子的参与度问题,假设字典中存在与小目标子块相似的原子,参与小目标成分的表达,则误差项中无法体现小目标,小目标会被淹没,造成漏检情况,而这样的原子有个特点,对于背景的低秩表达参与度很小,与条件 2)相违背。
对于条件2),如果存在与小目标相似的原子,则其对应的系数即参与度多为0,或接近0,表现在低秩系数矩阵Z中,对应行的数据只有极少数不为0,与小目标的个数有关。因空间限制,场景中小目标的个数不会过多,假设探测场景中出现弱小目标的个数最多为T,因初始化系数矩阵为均匀分布随机值,若某行出现非零数据的个数小于等于T,则对字典A进行更新,将字典中对应原子剔除,避免类似小目标的原子参与低秩表达,相应计算指标如下:

式中,i为低秩表达的系数矩阵Z的某行,ε为一阈值。若满足式(18),则将字典A中的第i个原子删除。
③ 梯度加权计算。在SLRC算法中更新K时,采用梯度l0范数最小提取背景图像的主要结构,保留较大的梯度值,平滑了较小的梯度值。为保护红外弱小目标不被平滑掉,更新K时,(hp, vp)计算公式变为
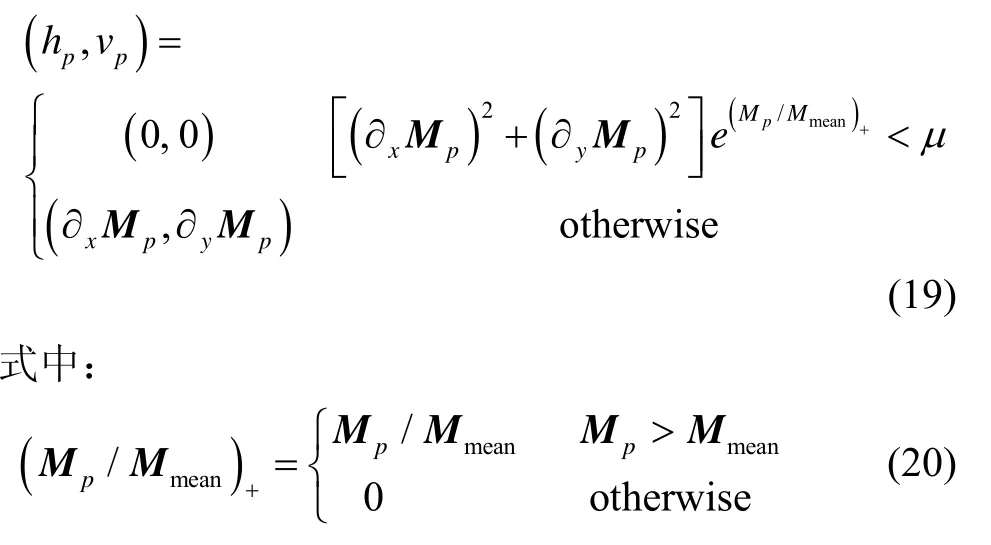
其中,Mmean为图像灰度均值,p为位置参数。若小目标位于背景较暗的区域,则小目标的局部对比度较大,梯度较大,相应的加权梯度也较大,小目标不会被平滑掉;若位于背景较亮的区域,小目标的局部对比度较小,梯度较小,但灰度较大,相应的加权梯度比梯度数值大,能够保护小目标不被平滑掉。
④ 小目标的确定。在SLRC算法框架下,经过图像主要结构抽取和低秩表达,低秩系数矩阵描述背景图像块之间的关系,误差项E主要由小目标和噪声成分组成。小目标分布较集中,噪声分布比较分散,计算误差矩阵E每列的F范数,数值较大的列即为小目标所在的区域,完成小目标的检测。
5 实验验证
实验数据部分来自M3制冷型中波红外热像仪,部分来自背景图像序列和人工合成目标,包括一个简单背景红外小目标图像序列,两个云杂波背景红外小目标图像序列,两个海天背景红外小目标图像序列,图像大小均为320×240,目标大小均小于6×6,分为3个实验。实验1:在5种背景下,单帧图像SLRC算法的检测效果。对图像提取主要结构,并将背景的主要结构进行低秩编码,因为小目标不能被背景字典稀疏表示,主要体现在误差矩阵中,通过对误差矩阵分析定位小目标。实验2:单帧图像中SLRC检测算法与其它检测算法进行对比,对比算法主要有 TH[4]、MaxMedian[5]、MaxMean[5],以及基于 RPCA[11]的SLMD[9],基于稀疏表达的 RDL[8];对比检测结果,从感观上评价小目标的局部信噪比增益。实验 3:客观评价 SLRC算法的检测性能。从受试者工作特征(receiver operation characteristic,ROC)曲线和平均局部信噪比增益两方面进行对比。
实验1:如图1所示,a为简单背景,b、c为云杂波背景,d、e为海天背景。对五幅红外小目标图像进行检测,第(1)列为原始红外小目标图像,第(2)列为SLRC算法得到的背景主要成分,第(3)列为背景主要成分低秩表达的误差项,第(4)列为误差项的3维示意图。由图1第(2)列可以清晰看出,SLRC算法抽取的背景主要结构,在亮度偏高的区域,细节保留比较多,在暗区域,平滑较为明显,因为使用灰度值加权梯度计算来代替梯度计算,较亮区域的加权梯度值较大,对亮区域中的小目标进行了保护;从第(3)(4)列可以看出,在各类背景下,检测得到小目标的局部对比度比较大,能够有效对小目标进行定位。
实验2:实验选取5种背景不同的单帧图像进行测试,A行为原始红外小目标图像,B行为TH算法检测结果,C行为MaxMean算法检测结果,D行为MaxMedian算法检测结果,E行为SLMD算法检测结果,F行为RDL算法检测结果,G行为SLRC算法检测结果。由图2可以看出:不同的算法,检测结果差异比较明显;TH利用开操作将暗背景下的小亮目标侵蚀掉,再与原图像相减,突出小目标,适用于平滑背景,对于噪声大,局部对比不明显的图像,如A(3)和A(4)检测效果不佳;MaxMean和MaxMedian算法检测的结果差异不大,分别对均匀噪声和椒盐噪声鲁棒,但对于纹理比较细腻的海天背景,噪声分布比较复杂,检测效果不佳;SLMD直接对背景进行低秩估计,提取原始图像的低秩背景,对于简单背景,存在很强的低秩特性,检测效果较好,但对于复杂背景,背景成分变化快,低秩特性不明显,检测效果存在较大的误差;RDL利用图像的稀疏表示,将背景和目标分别规则化为两种范数,以此来约束背景和目标的稀疏性,但缺乏字典优化,若误将背景和目标均作为字典,存在漏检和虚警情况;SLRC抽取图像主要结构的同时进行低秩表达,对背景图像进行了优化,背景低秩表示的误差比较小,每一步迭代对字典进行了分析优化,保证只有背景成分参与表达,有效降低了漏检率,对红外小目标的检测效果优于其他算法。
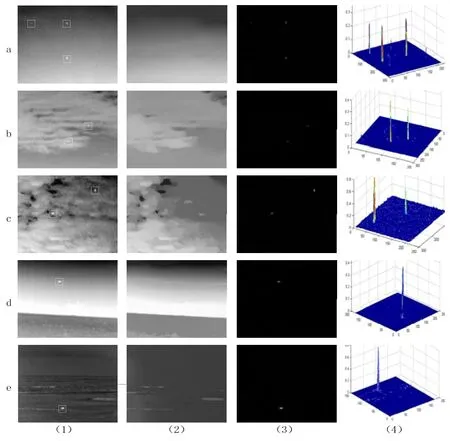
图1 SLRC检测结果Fig.1 Detection results of SLRC
实验3:本次实验采用实验2的A(2)~A(5)图像序列作为测试数据,将人工合成的目标添加到背景中,每张添加2个目标,因为本文所有方法均为单帧检测,没有使用帧间信息,故添加的位置是随机的,目标表达式为

式中,Imax、σx、σy在范围内随机取值,目标 T( i, j)的 大 小 为 4× max(σx,σy),(x0,y0)为小目标的中心位置,随机生成小目标,叠加到小目标,叠加到每一帧图像。人工合成图像序列概况如表1所示。
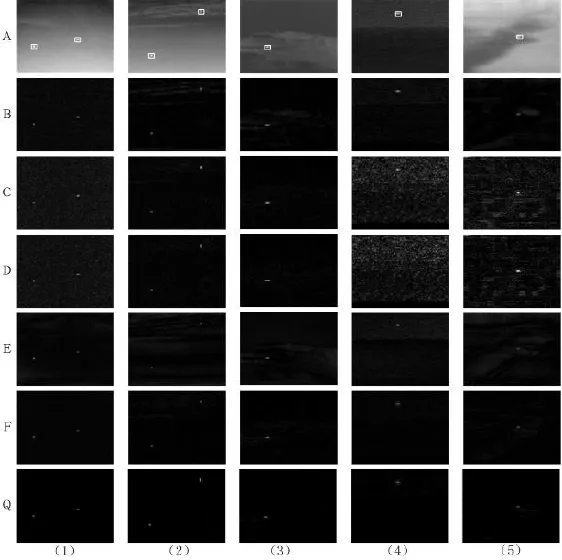
图2 检测结果对比Fig.2 Contrast on detection results
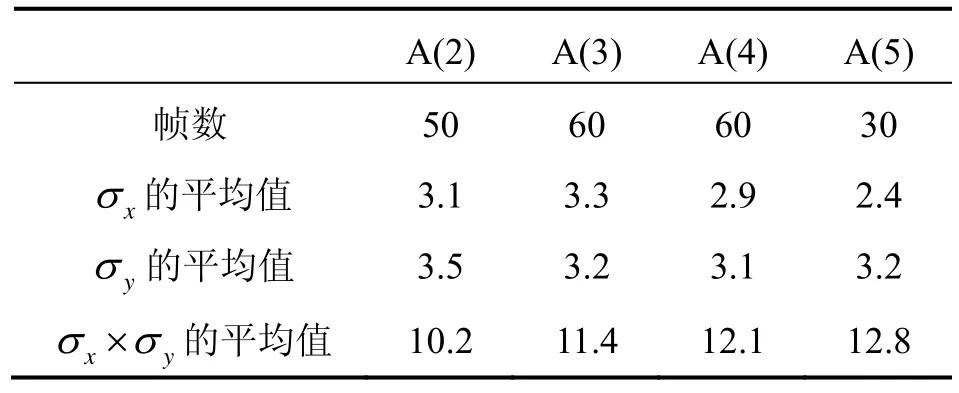
表1 合成的图像序列Tab.1 Image sequence of artificial synthesis
局部信噪比是衡量小目标检测难易程度的物理量,信噪比越高,小目标越突出,检测比较容易,局部信噪比增益衡量算法对小目标局部信噪比的影响,局部信噪比增益越大,说明算法越能促进小目标的检测。试验中采用信噪比增益和 ROC曲线对算法进行评价。ROC以虚警率为横轴,以检测率为纵轴,曲线与坐标轴围成的面积越大,算法越优越,检测率和虚警率定义如下:

式中,Nr为正确检测目标的数目,NT为实际目标的数目,Nw错误检测目标的数目,Ni序列中图像的帧数。通过调整图像含有的潜在目标数,得到 ROC曲线,虚警率相等时,检测率越高说明算法性能越好。
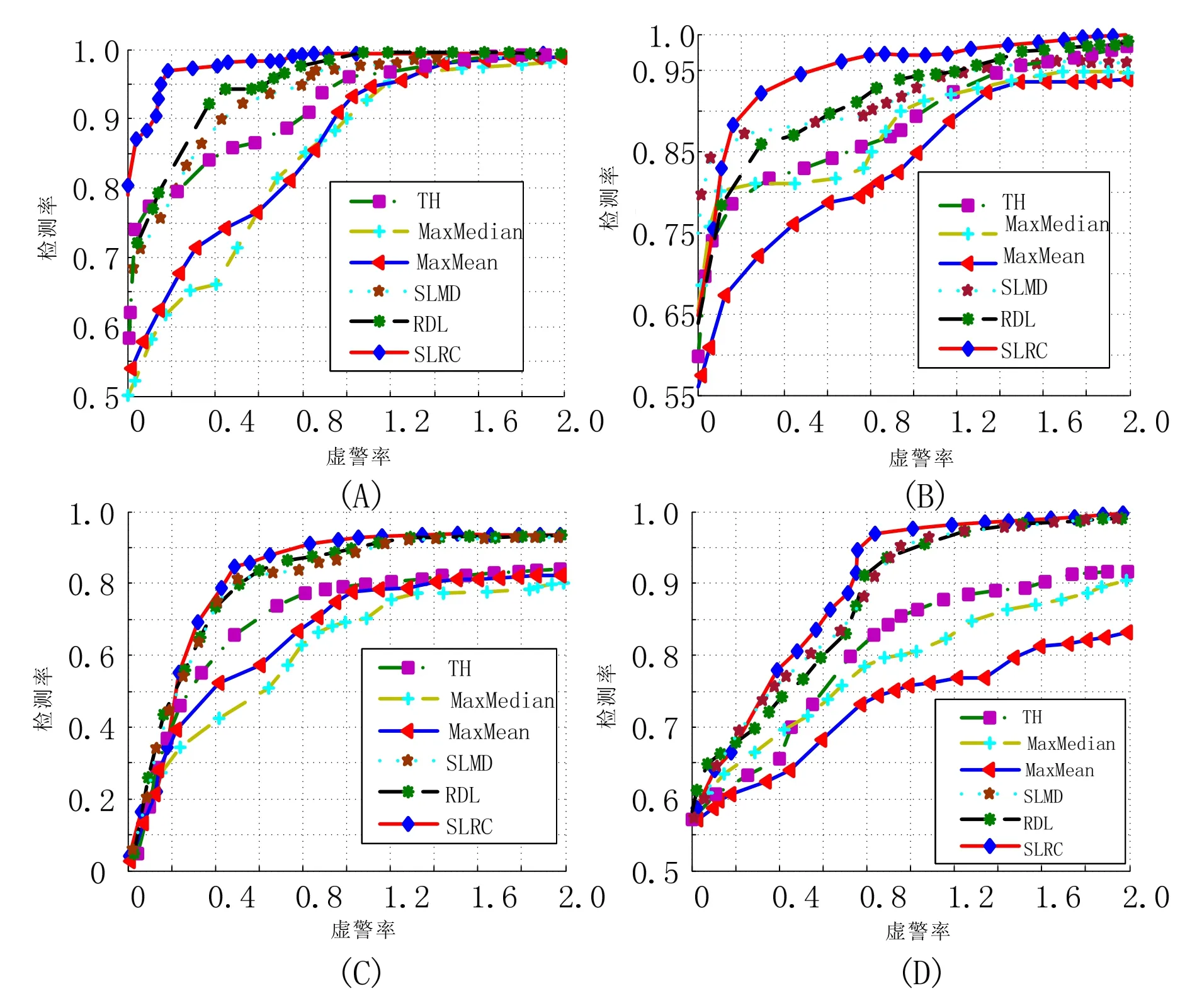
图3 6种算法ROC对比Fig.3 ROC curves of 6 detection algorithms
利用表1给出的图像序列,采用6种不同的算法对小目标进行检测,对比算法均采用作者提供的代码和默认参数,图3为ROC曲线对比图,图3(A)~(D)分别对应于表 1序列 A(2)~A(5)。从图中可以看出,SLRC和RDL算法性能较好,能够在各类背景中保持较高的检测水平,其余四种算法因背景差异表现不稳定,MaxMean和MaxMedian对环境要求苛刻,适应能力不强,SLRC算法包含了主要成分提取和低秩表达双重功能,对各类背景检测均比较稳定,与其他算法相比,ROC曲线较高,性能较好。小目标的局部信噪比定义如下:

式中,PT为目标最大灰度值,PB目标邻域内最大的灰度值,邻域取小目标区域的2倍大小。一般来说,局部信噪比越高,小目标和背景的对比度越高,检测越容易,局部信噪比增益是算法处理前后局部信噪比的比值,定义如下:

式中,LSNRout、LSNRin分别代表算法处理前和处理后的小目标局部信噪比。
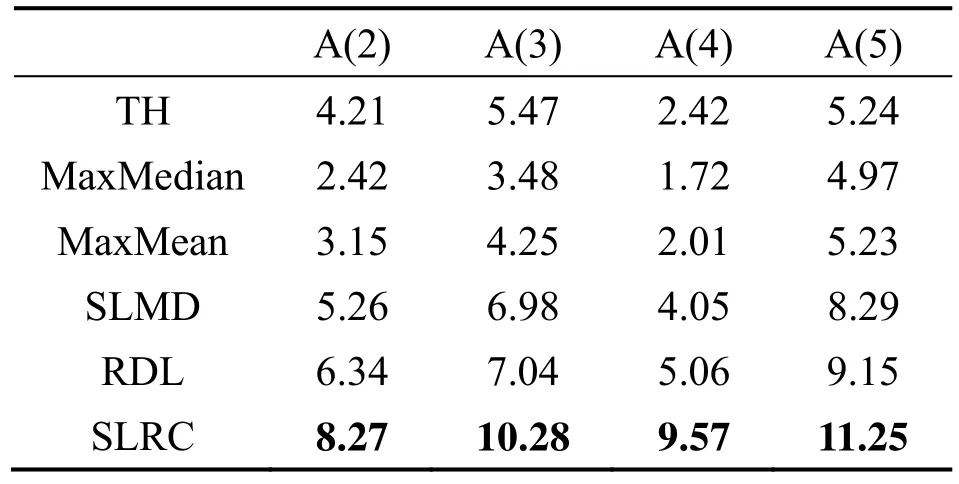
表2 平均局部信噪比增益Tab.2 Average gain for local ratio of signal to noise
表2给出了5种算法和SLRC算法的对比结果,SLRC取得了较高的平均局部信噪比增益,其他算法对于不同的图像序列,结果差异较大。主要原因是过度依赖背景的特殊结构。对于不同的背景,表现不同:RDL抽取了图像主要结构,效果明显较高,但是易受背景波动大的影响,不能很好地抑制背景成分;SLRC抽取了背景的主要结构,进行低秩表示,有效抑制了噪声,对于各类背景均取得较高的局部信噪比增益。
6 结 论
为应对复杂环境下红外弱小目标检测难的问题,本文将抽取背景主要结构和背景的低秩表达结合在一起,发掘背景图像块之间的线性表达关系,对背景建模,红外小目标的检测刻画为对误差项的约束,利用l1,2范数对小目标进行定位。实验表明,SLRC算法能够应对不同的复杂环境,保持较高的检测性能。
(References):
[1] 闫钧华, 陈少华, 徐俊峰, 等. 基于可见光与红外图像特征融合的目标跟踪[J]. 中国惯性技术学报, 2013, 21(4): 517-523. Yan Jun-hua, Chen Shao-hua, Xu Jun-feng, et al. Target tracking based on feature fusion of visible and infrared image[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 517-523.
[2] Zheng Cheng-yong, Li Hong. Small infrared target detection based on harmonic and sparse matrix decomposition[J]. Optical Engineering, 2013, 52(6): 066401-066401.
[3] Gao Chen-qiang, Zhang Tian-qi, Li Qiang. Small infrared target detection using sparse ring representation[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(3): 21-30.
[4] Tom V T, Peli T, Leung M, et al. Morphology-based algorithm for point target detection in infrared backgrounds[C]//Optical Engineering and Photonics in Aerospace Sensing. International Society for Optics and Photonics, 1993: 2-11.
[5] Deshpande S D, Meng H E, Venkateswarlu R, et al. Max-mean and max-median filters for detection of small targets[C]//SPIE’s International Symposium on Optical Science, Engineering, and Instrumentation. 1999: 74-83.
[6] Han Jin-hui, Ma Yong, Zhou Bo, et al. A robust infrared small target detection algorithm based on human visual system[J]. Geoscience and Remote Sensing Letters, 2014, 11(12): 2168-2172.
[7] Qi Sheng-xiang, Ma Jie, Tao Chao, et al. A robust directional saliency-based method for infrared smalltarget detection under various complex back-grounds[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(3): 495-499.
[8] Yang Chun-wei, Liu Hua-ping, Liao Shou-yi, et al. Small target detection in infrared video sequence using robust dictionary learning[J]. Infrared Physics & Technology, 2015, 68: 1-9.
[9] Zheng Cheng-yong, Li Hong. Small infrared target detection based on low-rank and sparse matrix decomposition[J]. Applied Mechanics and Materials, 2013, 239: 214-218.
[10] He Yu-jie, Li Min, Zhang Jin-li, et al. Small infrared target detection based on low-rank and sparse representation[J]. Infrared Physics & Technology, 2015, 68: 98-109.
[11] Liu Guang-can, Lin Zhou-chen, Yan Shui-cheng, et al. Robust recovery of subspace structures by low-rank representation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(1): 171-184.
[12] Xu Li, Lu Ce-wu, Xu Yi, et al. Image smoothing via L0 gradient minimization[C]//ACM Transactions on Graphics(TOG). ACM, 2011, 30(6): 174.
Infrared dim small target detection algorithm based on structural low-rank coding under complex environment
ZHAO Ai-gang, WANG Hong-li, YANG Xiao-gang, LU Jing-hui, HUANG Peng-jie
(The Second Artillery Engineering University, Xi’an 710025, China)
Aiming at the problem of dim small target detection under complex environment, a small-target detection algorithm with structural low-rank coding(SLRC) is put forward based on background’s slow varying, which combines background optimization with low-rank representation. Firstly, the background components with larger gradient are extracted using l0norm restrict of gradient. The grayscale rapid-varying structure is retained, and the slow-varying structure is smoothed. The background is optimized by this way. Secondly, the low-rank between pieces of background is modeled by the nuclear norm. And the model is built based on the background’s main structure, which is described by rank. At last, the error matrix by decomposition is sparse, which contains small-target rapid-varying structure. The infrared dim small target is located by l1,2norm of error matrix. Experiment results show that the SLRC detection algorithm can effectively explore the relationships between complex backgrounds and depress the jam of clutter. The minimum detection rate can be up to 92% when false-alarm is 2. These improve the detection performance of infrared dim small target under complex environment, basically satisfying the actual application requirements.
complex environment; small infrared target; low-rank representation; l0norm constraint
TP391
:A
2015-07-13;
:2015-09-28
国家自然科学基金(61203189,61374054)
赵爱罡(1986—),男,博士生,主要从事红外图像目标检测识别、机器视觉等。E-mail: zhoaigang1986120@163.com
联 系 人:王宏力(1965—),男,教授,博士生导师,主要从事复合制导、天文/惯性导航等。E-mail: wanghongli_1965@163.com
1005-6734(2015)05-0662-08
10.13695/j.cnki.12-1222/o3.2015.05.018
猜你喜欢
数学物理学报(2022年5期)2022-10-09
现代仪器与医疗(2022年1期)2022-04-19
北京航空航天大学学报(2019年9期)2019-10-26
小学阅读指南·低年级版(2019年11期)2019-07-01
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2018年1期)2018-04-04
雷达学报(2017年3期)2018-01-19
小天使·一年级语数英综合(2017年11期)2017-12-05
北京航空航天大学学报(2017年12期)2017-04-23
读者(2016年14期)2016-06-29