基于可观测度分析的传递对准精度评估方法
2015-06-01 12:30程建华陈岱岱王冰玉王通达
系统工程与电子技术 2015年4期
程建华,陈岱岱,王冰玉,王通达
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
基于可观测度分析的传递对准精度评估方法
程建华,陈岱岱,王冰玉,王通达
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
针对传统舰载领域传递对准精度评估性能受限于舰船有限的机动能力问题,提出了通过引入天文航向信息以及减速机动的舰载武器惯导系统传递对准精度评估方法。通过精度评估系统的可观测性分析,给出了引入角运动观测量以及载体机动这两种方法各自与精度评估性能之间的关系,并分别提出引入天文方位信息和舰船减速强机动的精度评估方法,利用固定点平滑算法进行仿真分析。仿真结果表明,引入天文航向信息的精度评估方法具有良好的姿态失准角评估性能,平滑误差小于10%,且所设计的减速强机动可以进一步提升方位失准角的平滑精度。
惯导系统;传递对准;卡尔曼滤波器;固定点平滑算法;可观测性分析
0 引 言
传递对准是适用于舰载武器惯导系统(inertial navigation system,INS)的一种动基座快速初始对准方法,但由于受舰载主惯导误差、杆臂效应、动态挠曲变形等诸多因素影响[1],传递对准方案在得到实际应用之前必须进行多次的性能评估试验,如仿真试验、地面试验和航行试验等[2]。其中,最为重要的是通过实际航行试验进行精度评估。例如,美国学者对捷联式惯导系统利用多次飞行试验,完成了45次有效的快速传递对准及精度评估飞行试验,精确评估了“速度+姿态”快速对准方法的对准性能,为武器战斗性能提供了可靠的参考依据[3]。文献[4- 5]分别利用固定点平滑算法与固定区间平滑算法,以差分全球定位系统(differential global positioning system,DGPS)的速度和位置作为基准信息,辅以加速运动的机动方式,通过平滑实现了机载领域惯导传递对准精度的评估。
现有的舰船领域传递对准通常借鉴机载领域的对准方法[68],因此,相应的对准精度评估方法也引用自机载领域的评估方法。但是舰船由于本身惯性大,且受水阻力影响,无法像飞机那样做出高强度的机动动作,因此造成姿态误差角的平滑精度不高,特别是方位误差角在载体不进行机动时,甚至无法进行有效估计[9]。
引入角运动观测信息是解决评估性能受限于舰船机动能力有限问题的有效方法。文献[10]研究了引入主惯导姿态信息进行舰载武器惯导传递对准精度评估的方法,但是通常舰船主、子惯导的姿态信息受舰船动态挠曲变形的影响很大,幅度较大的动态挠曲变形将直接导致主惯导信息无法作为有效的姿态信息基准。
本文分析Kalman固定点平滑算法及其与评估系统状态模型的关系,开展对精度评估系统的可观测性分析,并分别给出引入天文方位信息以及舰船减速机动的精度评估新方法,有效提升舰载武器惯导传递对准精度评估方法的性能,特别是大幅提升了方位失准角的评估精度。
1 对准精度评估的信号估计方法
在最优估计理论中,利用已有的一段时间内观测数据,估计之前时刻的状态问题,称为平滑。由于在完成传递对准之后,包括姿态失准角内的对准误差都将作为子惯导导航的初始误差作用于子惯导系统。因此,可以通过观测子惯导的导航参数误差平滑出传递对准误差,实现对传递对准精度的评估。精度评估中最为常用的平滑算法有Kalman固定点平滑算法与Kalman固定区间平滑算法,其中Kalman固定点平滑算法具有良好的实时性,可用于在线精度评估[11]。
设离散系统的状态空间描述为

式中,Xk为系统状态变量;Φk为系统一步转移矩阵;Wk-1为系统噪声;Zk为量测量,Hk为量测矩阵;Vk为量测噪声。
基于Kalman滤波方程,利用扩充状态变量的方法,将扩充与滤波状态变量一一对应的平滑状态量,可推得固定点平滑方程。
Kalman固定点平滑算法的解算步骤如下:
步骤1 滤波值与平滑值的初始化
式中,m为状态变量维数;上标f、s分别表示滤波、平滑过程量;Pk+1,k为一步预估计协方差阵,Pk为估计协方差阵。
步骤2 依据状态方程进行一步预估计,并计算一步预估计协方差阵

式中,Q为系统噪声阵。
步骤3 计算滤波增益矩阵,并结合量测量修正一步预估计值,得到滤波值

式中,Kk为增益矩阵;R为量测噪声阵。
步骤4 计算平滑增益矩阵,并结合量测量修正步骤3平滑值,得到固定点平滑值

步骤5 计算滤波协方差阵与平滑协方差阵

由于采用扩展状态法,导致步骤3和步骤4中增益矩阵与估计值解算方程具有相似性,即使得固定点平滑值的解算相对于滤波值是相对独立但又相似的过程,特别是平滑与滤波仿真曲线的初始段将会出现较大程度的重合,且Psk,k-1并不参与平滑值的迭代解算。
另外,由式(2)、式(3)及式(5)可知,固定点平滑过程与滤波过程相似,与精度评估系统的状态空间模型有着紧密的联系。特别是式(3)与式(5)体现了平滑算法也利用系统状态方程进行一步预估计,式(5)则利用量测方程提供平滑修正量,因此基于系统状态模型的可观测特性分析方法对精度评估的滤波与平滑过程同样适用,可用于精度评估解算前的系统分析[12]。
2 线运动信息匹配评估方法分析
2.1 精度评估系统状态空间描述
设系统的13维状态变量X为

针对舰船领域,可不考虑垂直通道,选用二通道惯导数学模型,其状态方程为

式中
传统的精度评估方法,选用DGPS的速度、位置作为外部基准信息,其量测方程为
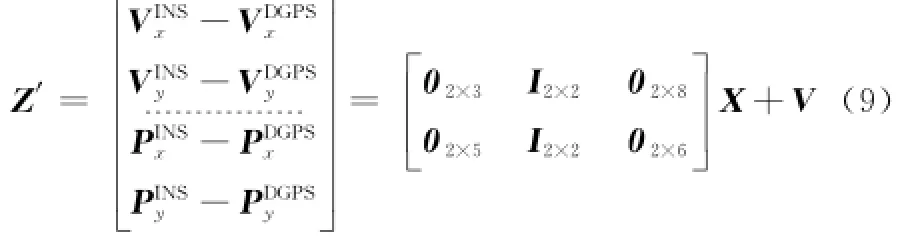
式中,上标INS、DGPS分别表示惯导、差分GPS所提供的信息。
2.2 精度评估系统可观测性分析
基于奇异值分解的可观测性分析方法,不仅能有效区分可观测与不可观测状态变量,还能定量给出各个状态变量的可观测度[13]。因此,在将Kalman滤波应用于惯导系统的研究中,通常选用基于可观测性矩阵奇异值分解的方法。将该种可观测性分析方法应用于传递对准精度评估,主要涉及两个问题:①可观测性和可观测度与平滑估计值的关联;②存在多个机动段对可观测性分析结果的影响。
首先,对精度评估系统进行可观测性分析期望得到评估方案与最终平滑结果间的联系。尽管此前大多数可观测性分析都是针对Kalman滤波解算进行,但由于可观测性分析针对的是未进行估计解算前系统状态空间描述,而精度评估过程中的滤波与平滑均是基于同一个系统模型,特别是固定点平滑是基于部分滤波数据的与滤波相似的迭代算法。因此,也可用系统可观测性分析方法对潜在的平滑性能进行表征。
其次,当精度评估方法中涉及多个机动段时,可应用分段线性定常系统(piece-wise constant system,PWCS)理论,将评估过程按不同机动段进行分解[14]。通常在进行精度评估时会涉及匀速运动与加速机动两种机动方式,因此将系统按机动方式分为两段。
由于现有舰船领域惯导对准精度评估方法大都采用引入姿态信息,解决评估性能受限于舰船有限的机动能力问题,现针对引入机动与引入姿态信息的系统可观测性展开分析。
具体的方案描述如表1所示。

表1 精度评估方案描述
其中,方案(a)与方案(b)的对比,可得到引入机动对精度评估性能的影响;方案(b)分别与方案(c)和方案(d)进行对比,可获得不同程度引入姿态信息对精度评估性能的影响。
系统的可观测分析结果如表2所示。

表2 系统可观测性分析结果
由表2可知,4种方案中φx的奇异值都较大,表明φx的可观测性较好,可以获取较好的平滑结果;φy的可观测性分析结果与φx相近。而对于方位失准角φz,在第1时间段内,只有引入了水平、方位信息的方案(d)对应的φz的奇异值较大,因此在第1时间段内只有方案(d)可以有效估计φz,上述分析结果表明方案(d)能够快速收敛。而在第2时间段内,未进行机动的方案(a)与未引入方位姿态信息的方案(c)对应的φz的奇异值很小,表明这两种方案φz的可观测性差,无法精确估计φz;方案(b)通过引入机动,使φz的奇异值增大,但是由于加速度绝对值较小,φz的估计精度较差;而引入水平、方位姿态信息的方案(d),在第2时间段内,φz的奇异值已大于1,表明在保证外界姿态信息高精度、可靠的前提下,可以精确、快速地平滑出方位失准角φz,从而实现传递对准精度评估。综上所述,引入载体机动与引入外界姿态信息都可以有效提升精度评估的性能,对方位失准角平滑性能的提升尤其明显。
3 对准精度评估方法
3.1 引入方位基准信息的精度评估方法
针对舰载武器惯导的方位失准角评估问题,设计一种只引入方位姿态外部基准信息的精度评估方法。由于除INS、GPS接收器之外,现代舰船还装备多种导航设备,如星体跟踪器等,在满足天气等理想条件下可提供高精度的舰船导航信息,完全满足作为评估用的惯导外部参考基准源的条件[15]。
由于DGPS的测姿精度还不够理想[16],因此选用能够提供精确位置、速度信息的DGPS,以及能提供精度达到10″精度量级航向信息的天文导航系统,构建组合观测基准。并通过与舰载武器INS近距离共基座安装的方式,避免动态挠曲变形对天文导航信息的影响。
在武器惯导系统完成传递对准后,以惯导与DGPS的位置差、速度差,惯导与天文导航系统的航向差作为滤波观测量,可得量测方程为

式中,上标CNS表示天文导航系统(celestial navigation system,CNS)所提供的信息;H表示方位信息。
3.2 引入强机动的精度评估方法
载体机动也可以用于进一步提升φz的估计精度。从系统状态方程角度出发,为了提升姿态失准角的精度评估性能,可以增大A1、B1阵中的近似为零值的矩阵项,以增强与姿态失准角的联系,通过提升系统状态方程对姿态失准角的估计贡献,进而影响平滑算法中的式(3),间接作用于最终的平滑值。
提取式(8)中与机动运动以及姿态误差角相关的速度运动方程,并进行转换可得

在进行Kalman滤波的一步预估计解算时,式(11)所表示的系统运动方程是计算精确系统状态一步预测值的主要解算分式。而对具体姿态误差分量作用的强弱,主要体现于式(11)中等式右边的3个系数矩阵元素该3项元素的物理意义对应于惯性器件加速度计所敏感到的载体比力信息。在舰船二通道惯导解算中作为水平姿态误差角φx、φy的系数矩阵对应项,而则对应于方位姿态误差角φz。在量纲上近似为当地重力加速度,而分别近似为舰船等载体的水平加速度,因此对于大型舰船通常大于一个数量级以上。的值充分体现出舰船的机动能力与精度评估方案整体性能是否可靠之间的关联程度。因此,传统的机载领域精度评估方案应用于舰船领域,通常出现方位姿态误差角φz无法有效估计的问题。
由式(11)可知,只要精度评估中的加速度绝对值变大,速度误差方程与φz经由比力系数的联系就将更加明显。可充分利用舰船运动环境的水阻力,甚至专门采取螺旋桨反转等手段在评估段主动施加大的反向加速度,增大B1阵中与φz相关的系数项fnx、fny,以解决精度评估方法受限于舰船有限的机动能力问题。结合上述分析结论,现将舰船减速机动用于辅助的舰载武器INS精度评估。
4 仿真分析
4.1 仿真条件
现设置舰载武器惯导系统陀螺常值漂移为0.1°/h,待平滑的对准姿态误差角设置为6′,分别对如下4种方案进行仿真:(1)传统方案;(2)“传统匹配方案+减速机动”;(3)“传统方案+天文方位信息”;(4)“传统匹配方案+减速强机动+天文方位信息”。具体的方案描述,如表3所示。
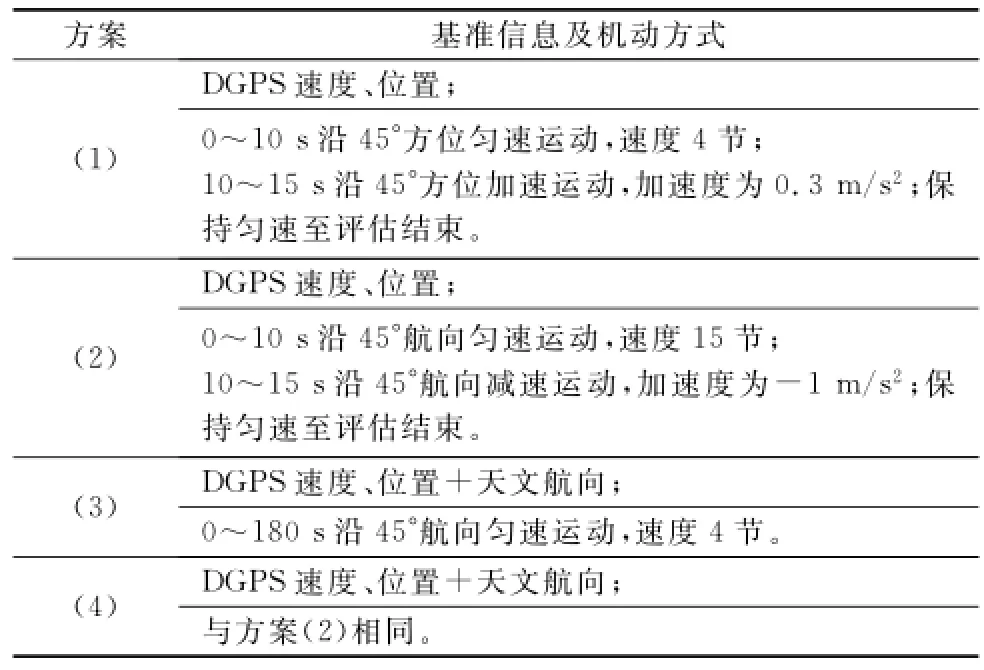
表3 仿真方案描述
其中,通过方案(1)与方案(2)的对比,可以获取本文设计的减速强机动相比于传统的加速机动,对精度评估性能的提升;方案(2)与方案(4)对比,可以比较引入天文航向信息对基于减速强机动方案的性能变化;方案(3)与其他机动方案的对比,用于分析引入天文航向信息在有无机动条件下的性能。
滤波器初始值设置为

传统机动方案的量测噪声矩阵为

引入天文航向信息的量测噪声矩阵为

4.2 仿真结果
依据上述仿真条件,对各方案利用固定点平滑算法分别进行仿真,获取仿真结果如表4和图1所示。由于水平姿态误差角的估计性能相近,仅给出φx的仿真结果。

表4 对准精度评估仿真结果(真值为6′)

图1 姿态失准角的固定点平滑仿真曲线
由图1可知,引入减速机动以及天文航向信息的方案(2)~方案(4)均不同程度地取得了优于方案(1)的精度评估性能,特别是对航向失准角φz的平滑估计,由传统方案(1)中的无法有效估计变为能够精确估计,且估计误差均小于5%。此外,在引入天文航向信息的方案(3)与方案(4),对φz的估计曲线收敛速度比仅采用机动方式的方案(1)与方案(2)更快,后者需进入机动段才能开始对航向失准角进行平滑估计。结果表明,引入引入角运动匹配信息与强机动均有利于方位失准角估计,这对舰载武器的方位失准角评估具有重要意义。对于方位姿态误差角,传统方法方案(1)中的平滑值仅用于对比,并不具备实际意义,因为平滑曲线没有收敛。
在引入减速机动后,对水平姿态角的平滑估计精度有所提升,特别是对φy的估计误差由方案(1)的18.20%降为10%左右;而对φx的平滑估计误差,其变化并不明显,均在10%以内。方案(2)的φx平滑估计值特别接近真值,这主要是由于表4反映的是求解的均值,而在仿真时发现,引入减速强机动的方案(2)及方案(4),其水平姿态平滑值的多次仿真数据稳定性相对较差,因此方案(2)及方案(4)水平姿态平滑值,只能在一定程度上反映估计性能。而方案(3)的多次仿真数据稳定性最为理想。
综上所述,本文所设计提出的引入天文航向信息的传递对准精度评估方法,具有良好的评估性能,对全部姿态失准角的平滑误差在10%以内,且有良好的数据稳定性。而在需要获取最优的方位失准角评估性能时,可在引入天文信息的基础上再引入载体减速强机动,进一步提升方位姿态误差角的平滑精度。
5 结 论
针对现有舰载武器INS传递对准精度评估存在的问题,由精度评估系统的状态估计算法出发,通过系统可观测性分析,给出了引入角运动信息以及载体机动与提升精度评估性能之间的关系,并设计了引入天文航向信息与舰船减速机动的精度评估新方法。通过仿真分析,表明所设计的精度评估方法,具有良好的评估性能,有效解决了评估精度受限于舰船机动强度的问题,特别是能够明显提高方位姿态误差角的平滑精度,是一种有效的舰载武器惯导传递对准精度评估方法。
[1]Xu J,Wang Y,Xiao Z.Rapid transfer alignment for SINS of carrier craft[J].Journal of Systems Engineering and Electronics,2013,24(2):303- 308.
[2]Titterton D H,Wseton J L.Strap down inertial navigation technology[M].2nd ed.United Kingdom:Institution of Electrical Engineerings,2004.
[3]Shortelle K J,Graham W R,Rabour C.F-16 flight tests of a rapid transfer alignment procedure[C]∥Proc.of the IEEE Position Location and Navigation Symposium,1998:379- 386.
[4]Xu J S,Qin Y Y,Gu D Q.Application of fixed point smoothing to the testing and evaluation of INS in-flight alignment[J].Measurement&Control Technology,2004,23(11):74- 76.(徐景硕,秦永元,顾冬晴.固定点平滑技术在惯导系统对准精度评估中的应用[J].测控技术,2004,23(11):74- 76.)
[5]Sun F,Lv Y H,Wang G,et al.The accuracy evaluation research on transfer alignment[C]∥Proc.of the IEEE International Conference on Mechatronics and Automation,2008:379- 384.
[6]Ding Z J,Cai H,Yang H B.Novel transfer alignment of shipborne gimbaled inertial navigation systems[J].Transactions of the Japan Society for Aeronautical and Space Sciences,2014,57(2):93- 100.
[7]Yang D,Wang S,Li H,et al.Performance enhancement of large-ship transfer alignment:a moving horizon approach[J].Journal of Navigation,2013,66(1):17- 33.
[8]Liu X X,Xu X S,Liu Y T,et al.A fast and high-accuracy transfer alignment method between M/S INS for ship based on iterative calculation[J].Measurement,2014,51:297- 309.
[9]Cheng J H,Chen D D.Research of transfer alignment accuracy evaluation based on DGPS assisted with the ship’s attitudes[J].Journal of Harbin Engineering University,2012,33(12):1509 -1514.(程建华,陈岱岱.舰船姿态信息辅助DGPS的传递对准精度评估方法[J].哈尔滨工程大学学报,2012,33(12):1509 -1514.)
[10]Rong W T,Cheng J H,Zhao L.Transfer alignment evaluation method for shipborne SINS based on multi-observation variable[J].Systems Engineering and Electronics,2013,35(2):381- 385.(荣文婷,程建华,赵琳.基于多观测量的舰载惯导传递对准精度评估方法[J].系统工程与电子技术,2013,35(2):381- 385.)
[11]Simo S.Bayesian filtering and smoothing[M].Cambridge:Cambridge University Press,2013.
[12]Cho S Y,Lee H K,Lee H K.Observability and estimation error analysis of the initial fine alignment filter for nonleveling strapdown inertial navigation system[J].Journal of Dynamic Systems,Measurement,and Control,2013,135(2):021005- 1-201005- 9.
[13]Li Y,Li Y,Rizos C,et al.Observability analysis of SINS/GPS during in-motion alignment using singular value decomposition[J].Advanced Materials Research,2012,433:5918- 5923.
[14]Goshen-Meskin D,Bar-Itzhack I Y.Observability analysis of piece-wise constant system,partⅡ:application to inertial navigation in-flight alignment[J].IEEE Trans.on Aerospace and Electronic Systems,1992,28(4):1068- 1075.
[15]He J.Survey of overseas celestial navigation technology development[J].Ship Science and Technology,2005,27(5):91-96.(何炬.国外天文导航技术发展综述[J].舰船科学技术,2005,27(5):91- 96.)
[16]Yang J X,Yan J,Lu H.Design of the project of evaluation the transfer alignment accuracy of SINS based on GPS[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,25(3):141-144.(杨金旭,阎杰,鲁浩.基于GPS的捷联惯导传递对准精度评估试验方案设计[J].弹箭与制导学报,2005,25(3):141- 144.)
Approach of transfer alignment accuracy evaluation based on observability degree analysis
CHENG Jian-hua,CHEN Dai-dai,WANG Bing-yu,WANG Tong-da
(Automation College,Harbin Engineering University,Harbin 150001,China)
In order to solve the problem that the performance of transfer alignment accuracy evaluation is retrained by the ship’s limited maneuver ability,a method of accuracy evaluation for shipborne weapon inertial navigation system is put forward.The azimuth information applied by celestial navigation system and decelerated maneuver manner are introduced.Observability analysis of system is implemented so that the relationship between accelerated motion,rotation observation variable and the performance of evaluation approach are proposed.And a simulation is carried out by using fixed-point smoothing algorithm.The result shows that the proposed method has an excellent performance for misalignment angles,and the errors of smoothed estimations are less than 10 percents.Moreover,the decelerated maneuver can improve the smoothed accuracy of azimuth misalignment angle.
inertial navigation system(INS);transfer alignment;Kalman filter;fixed point smoothing algorithm;observability analysis
U 666.1
A
10.3969/j.issn.1001-506X.2015.04.26
程建华(1977-),男,副教授,博士,主要研究方向为惯性导航与定位技术、组合导航技术。E-mail:ins_cheng@163.com
陈岱岱(1988-),男,博士研究生,主要研究方向为惯性导航与定位技术、惯导初始对准及性能评估技术。E-mail:ins_dai@163.com
王冰玉(1988-),女,硕士研究生,主要研究方向为水下导航技术。E-mail:ins_wby@163.com
王通达(1990-),男,博士研究生,主要研究方向为惯性导航与定位技术。E-mail:wangtongda1990@163.com
1001-506X(2015)04-0895-06
2014- 04- 09;
2014- 10- 16;网络优先出版日期:2014- 10- 28。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141028.1612.003.html
国家自然科学基金(61104036,61374007,62173081);中央高校基本科研业务费专项资金(HEUCFX41309)资助课题
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2021年12期)2021-03-29
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
舰船科学技术(2016年1期)2016-02-27
计算技术与自动化(2014年1期)2014-12-12