导弹协同作战四维制导与控制一体化设计方法
2015-06-01 12:30王晓芳郑艺裕
系统工程与电子技术 2015年4期
王晓芳,郑艺裕,2,林 海
(1.北京理工大学宇航学院,北京100081;2.哈尔滨工业大学深空探测基础研究中心,黑龙江哈尔滨150001)
导弹协同作战四维制导与控制一体化设计方法
王晓芳1,郑艺裕1,2,林 海1
(1.北京理工大学宇航学院,北京100081;2.哈尔滨工业大学深空探测基础研究中心,黑龙江哈尔滨150001)
为了使导弹能够在指定的时间跟踪理想轨迹到达指定点,从而满足多导弹协同突防和攻击的要求,提出一种鲁棒四维精确制导控制一体化设计方法。将导弹6自由度非线性模型进行简化,得到导弹四维精确制导与控制一体化设计模型。利用导弹质心与姿态运动固有的时标分离特性,设计了具有内外两回路结构的鲁棒控制器。将建模误差、参数摄动及外部干扰视作连续有界扰动,外回路基于自适应滑模控制理论设计了控制器,从而产生推力、攻角和侧滑角指令;内回路将扰动观测器技术和动态面控制理论相结合,得到了能够控制导弹准确跟踪外回路指令的执行机构偏转角。基于李雅普诺夫稳定性理论,严格证明了内外回路的稳定性,并分析了控制精度与控制器参数之间的关系。最后,将控制方法应用于导弹6自由度非线性数值仿真模型,仿真结果验证了所设计的四维鲁棒精确制导控制方法的有效性。
四维制导与控制一体化;自适应滑模控制;动态面控制;扰动观测器
0 引 言
导弹的四维精确制导是指在原来三维精确制导系统的基础上考虑时间的因素,成为“三维空间+时间”的四维精确制导,使精确制导弹药满足网络化、智能化协同作战的要求[1-2]。四维精确制导的显著优点在于其可以结合航迹规划技术控制弹群几乎同时到达目标阵地或者某个事先指定的路径点,从而对目标实施有效的饱和攻击和战术突防,实现多导弹在时空上的协同作战。
目前,对于导弹协同作战的四维精确制导控制技术,研究成果并不多见。针对防区外多导弹的协同突防问题,文献[3]假设在目标阵地雷达探测范围的边缘有虚拟目标,将导弹视为质点,然后设计制导律在指定的时间将导弹导引至该虚拟目标,从而完成精确制导。文献[3]中的制导问题是“二维空间+时间”的制导,并不能直接应用至“三维空间+时间”的四维精确制导问题中。文献[4]提出了具有3个剖面的导弹协同作战四维制导控制构架,并在总能量控制理论的基础上,针对采用倾斜转弯(bank-to-turn,BTT)控制形式的、具有过载自动驾驶仪内回路的导弹设计了速度/高度解耦控制器。但基于总能量控制原理的设计方法一般假设导弹阻力为常值且导弹的弹道倾角不能太大,因而在大空域、高机动的协同作战中,该方法具有一定的局限性,此外,对采用此控制器的系统的稳定性和鲁棒性分析也存在较大的难度。
传统的制导系统和控制系统通常分开来设计,往往存在设计冗余、成本高以及不能充分发掘武器系统整体性能潜力等不足。针对此问题,学者们提出了制导控制一体化(integrated guidance and control,IGC)设计方法,并将IGC思想与反演控制[5]、最优控制[67]、反馈线性化[8]、动态逆[9]以及滑模控制[10-12]等理论相结合,形成了不同的飞行器控制方法。但是,由于导弹具有质心运动与姿态运动固有的时标分离特性[14],因此,基于单回路设计的IGC方法在某些情况下会造成导弹的快变模态出现失稳的现象[13]。为此,文献[15- 16]提出一种双回路的IGC设计方法并验证了其优越性。
本文首先对导弹6自由度非线性模型进行合理简化,然后基于导弹的质心运动与姿态运动固有的时标分离特性,采用IGC思想,提出一种可控制导弹准确跟踪指定轨迹、具有内外两回路结构的鲁棒四维精确制导控制方法。考虑由建模误差、气动和结构参数摄动等引起的不确定性及外部干扰,在外回路设计中,采用自适应滑模控制理论设计了可以将跟踪误差控制至任意小且对干扰具有良好抑制能力的连续控制律;内回路设计中,将扰动观测器技术与动态面控制理论相结合,设计了可有效跟踪外回路指令的鲁棒控制律。基于李雅普诺夫稳定性原理严格证明了内外回路控制律的稳定性并分析了控制精度与控制律参数之间的关系。最后,通过仿真算例验证了本文方法的有效性。
1 导弹四维精确制导与控制一体化设计模型
1.1 外回路设计模型
导弹质心运动的运动学方程为
式中,x、y和z为导弹的质心位置在地面坐标系三轴的分量;Vx、Vy和Vz为导弹的速度在地面坐标系三轴的分量。令x0=[x y z]T,x1=[VxVyVz]T,则式可表示为

在地面坐标系下,导弹质心运动的动力学方程为


式中,α、β为攻角和侧滑角;δx、δy和δz分别为副翼、方向舵和升降舵的偏转角;CX0为零升阻力系数和分别为阻力系数CX对α2、β2、δx、δy和δz的偏导数;为阻力系数CX对α和β的二阶混合偏导数和分别为升力系数CY对α、β和δz的偏导数和分别为侧向力系数CZ对α、β与δy的偏导数;q为动压;S为导弹的特征面积。
考虑升力、侧向力中起主要作用的项及为了对模型进行简化,将X、Y和Z表达为

此时,导弹质心动力学方程式可写为

式中

uout=[Pcαcβc]T为外回路控制指令;d1为包括模型简化处理引起的建模误差、气动参数和结构参数摄动引起的扰动以及外部扰动的连续有界扰动项。外回路控制指令中,Pc进入导弹推力系统,作为发动机装置需产生推力的标称值;αc和βc则进入内回路姿态控制系统,作为姿态控制系统的标称输出值。
根据式和式可得外回路设计模型为

1.2 内回路设计模型
描述攻角、侧滑角和滚转角变化的微分方程为
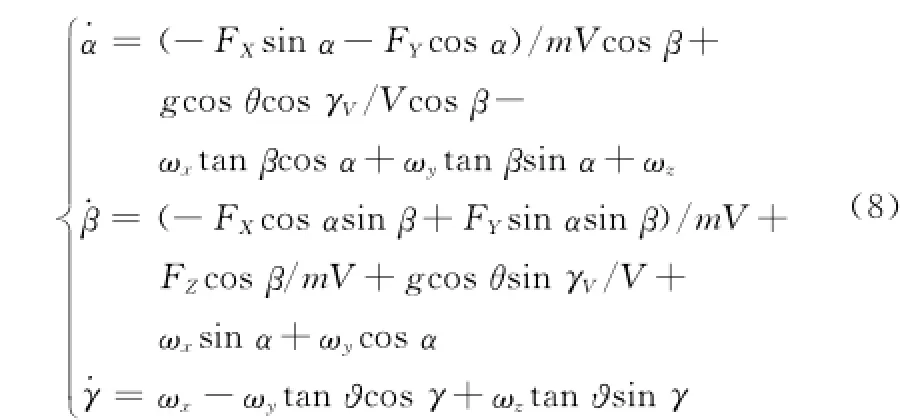
式中

ωx、ωy和ωz为导弹旋转角速度在弹体坐标系三轴的分量。
忽略FX、FY和FZ对攻角、侧滑角的影响,则有

式中

d2为忽略FX、FY和FZ引起的建模误差、气动参数和结构参数摄动等项的总和,作为连续有界扰动处理。
同理,描述导弹姿态角速度变化的方程可简化为

式中

uin=[δxδyδz]T为系统的控制量;d3为忽略次要因素对力矩的影响而引起的建模误差、气动参数和结构参数摄动引起的扰动等项的和,视为连续有界扰动。
综合式(9)和式(10),可得内回路设计模型为

2 控制器设计及稳定性分析
假设导弹四维航迹规划给出的理想轨迹为x0d(t)=[xd(t)yd(t)zd(t)]T,式中,t为时间,下标d表示理想值,则控制器的设计目标为:考虑建模误差、参数摄动及外部干扰,设计控制器Pc、δx、δy和δz,使得导弹的质心位置矢量x0能稳定地跟踪x0d(t),且滚转角收敛于期望值γc=0。外回路中,以uout=[Pcαcβc]T作为控制量,控制目的是使x0稳定地跟踪x0d(t)。内回路中,以uin=[δxδyδz]T作为控制量,控制目的是使导弹的滚转角收敛于期望值γc=0、导弹的攻角和侧滑角稳定地跟踪外回路给出的指令αc和βc。内外两回路控制系统结构示意图如图1所示。
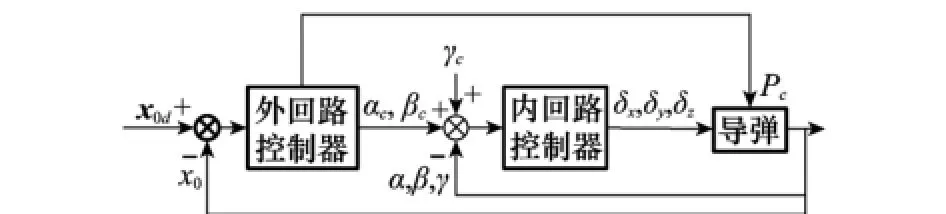
图1 内外回路控制系统结构示意图
2.1 外回路控制器设计与稳定性分析
对于外回路控制系统式(7),首先给出如下假设:
假设1 干扰d1是连续有界的,且满足

式中,ρ1为大小未知的正数。
定义外回路跟踪误差

以及滑模变量

式中,κout>0。由式(14)可知,当sout=0时,有˙eout=-κouteout,则eout→0。因此,只需设计控制律uout使得滑模变量sout收敛于零即可。
对滑模变量sout求导,并考虑式(13)和式(7)可得

设计控制律


式中,a1>0。
为了分析滑模变量sout的收敛特性,构建李雅普诺夫函数

当‖sout‖≥υ时,对Vout求导,并考虑式(15)~式(17)以及假设1可得

因此,控制量式可以保证滑模变量sout收敛至如式(20)所示区域。

可以看出,为使得sout尽量收敛于零,保证控制精度,须取得足够小。为了分析参数与控制精度的关系,对于如式(14)所示的滑模面,定义李雅普诺夫函数

对V0s求导并考虑式(14)可得

当‖eout‖>υ/κout时,有˙V0s<0,eout将最终收敛至如式(23)所示区域。

因此,为了保证控制精度,需选择足够小的或者足够大的κout。
计算控制量式(16),可以得到3个指令Pc、αc和βc,它们分别进入推力系统和内回路姿态控制系统。
2.2 内回路控制器设计与稳定性分析
由于式给出的内回路设计模型中同时包含干扰d2和d3,且状态变量x2和x3之间并不存在简单的微分或者积分运算关系,利用前述外回路控制器的设计方法来解决内回路控制器设计问题将会有较大的难度。同时,考虑到内回路设计模型具有严格反馈的级联形式以及扰动观测器技术对干扰具有有效的估计和抑制能力,本文结合动态面控制理论[1718]与扰动观测器技术[19]来设计内回路控制器并分析其稳定性。
将外回路给出的跟踪指令αc、βc和指定的倾斜角指令γc写为

为了改善内回路控制系统的动态特性,设计如式(25)所示,低通滤波器对x2c进行滤波。

式中,τ2>0为滤波器时间常数。则内回路控制器的设计目标为:设计导弹的3个舵偏角δx、δy和δz(即uin),使得状态变量x2稳定地跟踪低通滤波器式(25)的输出x2d。需要说明的是,为了使x2最终可有效地跟踪外回路指令x2c,滤波器时间常数不能太大。
步骤1 定义动态面

对其求导并考虑式可得

将状态变量x3视为虚拟控制量x3c,设计x3c为

式中,k2为动态面增益;^d2为扰动观测器对扰动d2的观测值。对于倾斜稳定导弹来讲,通常倾斜角γ较小,因此可认为cosγ≈1、sinγ≈0,此时有g2=-cos(ϑ-α)/cosϑ,考虑存在。将导弹飞行的实际情况,有cos(ϑ-α)≠0,因此x3c通过低通滤波器2(Filter 2),有

式中,τ3>0为滤波器时间常数。定义动态面

将式变换为x3=s3+x3d,将其代入式(27),再综合考虑滤波器式(29)及虚拟控制量x3c,基于扰动观测器原理设计如图2所示的扰动观测器,得到干扰d2的观测值^d2。
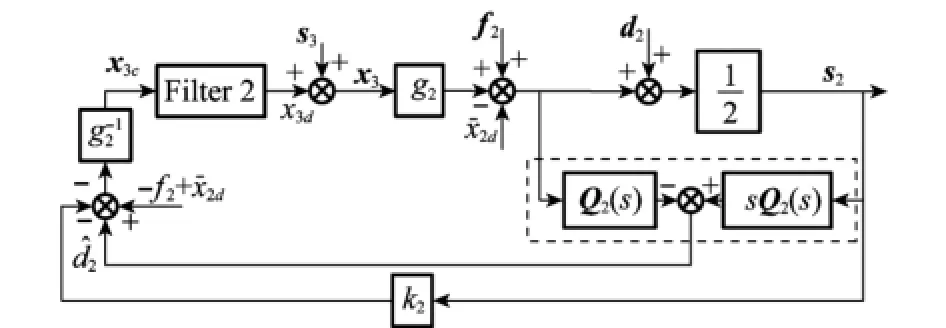
图2 针对干扰d2的扰动观测器框图
图2 中,低通滤波器Q2(s)为

式中,λ2>0为时间常数;s=d(·)/d t为拉普拉斯算符。步骤2 对式(30)求导并考虑式(11)可得

类似于步骤1,设计控制量uin为

式中,k3>0为动态面增益;^d3为干扰d3的估计值。由于因此存在。针对干扰d3设计的扰动观测器如图3所示。

图3 针对干扰d3的扰动观测器框图
图3 中,低通滤波器Q3(s)为

式中,λ3>0为时间常数。
至此,给出了内回路控制器设计的完整过程。为了分析该控制器的稳定性,定义边界层误差

以及干扰估计误差

由式(30)~式(36)可以推导得

对式(35)求导,有


式中,η3>0。
设定李雅普诺夫函数

对Vin求导并考虑式(37)~式(39),可得

选择设计参数满足
则有

由扰动观测器原理知

再根据比较原理[20],可得

因此,s2、s3和y3均是一致最终有界的,可以通过选择较大的设计参数k2、k3以及较小的τ3来获取足够大的κ,使得Vin的界足够小,保证控制精度。但在实际情况中,过大的k2、k3以及过小的τ3容易导致导弹的舵偏角饱和,引发系统的饱和非线性特性,或使导弹的需用过载超过可用过载,也可能使系统的暂态性能下降,导致导弹的攻角和侧滑角超出允许的线性范围。此外,考虑低通滤波器的物理限制,τ3的选取也不可能任意小。因此,需综合各种情况来合理确定控制算法中的设计参数。
3 仿真与分析
基于Matlab/Simulink软件,采用文献[21]中的导弹6自由度非线性模型,对本文所设计的控制器进行仿真验证。某导弹的初始位置r0=[0 1.5 0]Tkm、初始速度、初始弹道倾角、弹道偏角、姿态角和姿态角速度均为零。导弹的结构与气动参数标称值采用文献[22]中的数据(出于篇幅考虑,不再列出),本算例中,假设导弹的气动参数存在30%的摄动。假设在多枚导弹协同作战过程中,要求此导弹在指定的时刻Td=100 s到达期望的路径点rf=[20 2 1]Tkm,途中规划的理想轨迹为

外回路控制器设计参数κout=0.5,a1=0.01,v1=0.01。内回路控制器设计参数τ2=0.01,τ2=0.1,k2=10,k3=10,两个扰动观测器的时间常数均取为0.06 s。
另外,假设推力的动态特性可由一阶系统描述,有

式中,推力系统惯性时间常数τp=0.5;推力的初始值P(0)=2 k N。假设导弹3个舵偏角的最大值为15°,推力的最大值为10 k N,可用切向过载和法向过载分别为1、5、5。仿真结果如图4~图14所示。

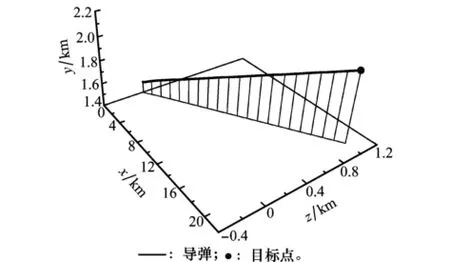
图4 四维制导导弹运动轨迹

图5 轨迹跟踪误差曲线

图6 导弹攻角与攻角指令αc曲线

图7 导弹侧滑角与侧滑角指令βc以及滚转角曲线
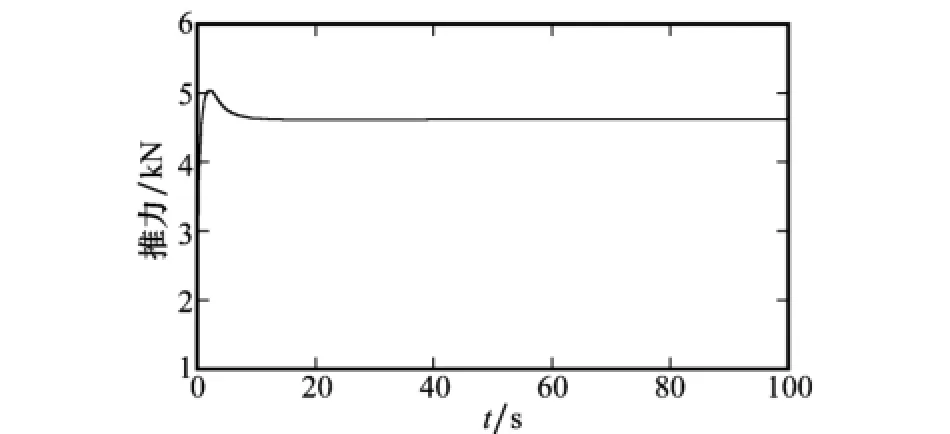
图8 导弹推力曲线
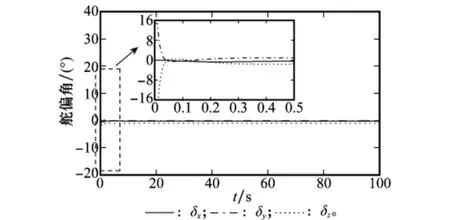
图9 导弹舵偏角曲线

图10 导弹过载曲线
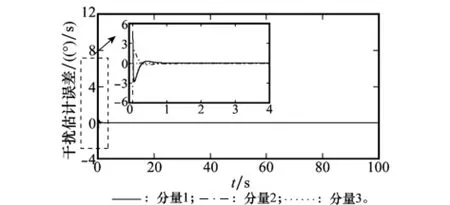
图11 干扰估计误差e2曲线

图12 干扰估计误差e3曲线

图13 改变系数后的轨迹跟踪误差曲线

图14 改变系数后的导弹过载曲线
由图4和图5可看出,在存在参数摄动的前提下,导弹经过一段时间后能够较好地跟踪理想轨迹,最终在Td=100 s时与期望路径点的距离为0.26 m,可认为已到达该点,实现了四维精确制导,表明本算法具有良好的精度和鲁棒性。由图6和图7可以看出,导弹的攻角和侧滑角可以良好地跟踪外回路的指令,导弹的滚转角可快速收敛为零。由图8~图10可看出,导弹的控制量幅值未超出给定的范围且导弹的切向过载和法向过载均在导弹的可用过载范围内,说明了本方法的可实现性。
图11和图12显示了扰动观测器对干扰d2、d3的估计情况。由图11和图12可知,干扰估计误差e2和e3均可以快速地收敛为零,显示了其优良性能。
为了说明外回路和内回路控制器系数对制导控制系统的影响,改变系数为κout=2,τ3=0.05,k2=15,k3=15,导弹实际轨迹与理想轨迹之差如图13所示,导弹的过载如图14所示。
由图13可见,此时,制导控制系统的精度提高,当Td=100 s时,导弹与期望路径点的距离减小为0.06 m。但导弹的需用过载较之前增加,分别由原来的0.03、1.06、1.26增加到0.09、2.92和4.38。由此可知:增大内回路和外回路控制器的系数,可减小轨迹跟踪误差、提高制导控制系统的精度,但同时会增大导弹的需用过载,对导弹提出更高的要求,因此,应综合考虑导弹的控制能力及跟踪精度要求来合理确定控制器系数的取值。
4 结 论
针对多导弹协同作战过程中要求某导弹在指定的时间到达指定地点的问题,考虑导弹的建模误差、参数摄动、外界干扰等因素,基于制导控制一体化思想,提出了一种能够实现导弹四维精确制导与控制的两回路设计方法。分别采用自适应滑模控制理论、扰动观测器技术与动态面控制理论相结合的理论和方法设计了外回路和内回路鲁棒控制器,并基于李雅普诺夫稳定性原理证明了其稳定性,定性分析了控制器参数对系统控制精度与暂态性能及控制量变化之间的关系。通过仿真算例验证了本方法的正确性。所提四维精确制导与控制方法可用于多枚导弹的协同突防和协同攻击,从而可为导弹向智能化、网络化方向发展提供一定的技术储备。
[1]Wang L G,Li H J.Research on simulation of four-dimensional precision-guidance for cruise missile[J].Science Technology and Engineering,2009,21(9):6603- 6607.(王立刚,李海静.飞航导弹四维制导技术研究[J].科学技术与工程,2009,21(9):6603- 6607.)
[2]Wang F,Tu Z B,Wei J N.Research on key technical problems of cooperative penetration for tactical missile[J].Tactical Missile Technology,2013(3):13- 17.(王芳,涂震飚,魏佳宁.战术导弹协同突防关键技术研究[J].战术导弹技术,2013(3):13- 17.)
[3]Xiao Z B,Lei H M.Composite guidance of multiple stand-off missiles cooperative penetration[J].Modern Defence Technology,2011,39(1):63- 67.(肖增博,雷虎民.防区外多导弹协同突防复合制导研究[J].现代防御技术,2011,39(1):63- 67.)
[4]Cui N G,Wei C Z,Guo J F.Research on four-dimensional guidance and control for missile cooperative engagament[J].Flight Dynamic,2010,28(2):63- 66.(崔乃刚,韦常柱,郭继峰.导弹协同作战四维制导控制研究[J].飞行力学,2010,28(2):63- 66.)
[5]Tang Z L,Lei H M,Shao L.Integrated guidance and control of nonlinear missile based on adaptive backstepping design[J].Science&Technology Review,2008,26(21):26- 29.(唐治理,雷虎民,邵雷.基于自适应反步法的非线性导弹制导/控制系统综合设计[J].科技导报,2008,26(21):26- 29.)
[6]Vaddi S S,Menon P K,Ohlmeyer E J.Numerical SDRE approach for missile integrated guidance-control[C]∥Proc.of the AIAA Guidance,Navigation and Control Conference and Exhibit,2007:1- 15.
[7]Palumbo N F,Reardon B E,Blauwkamp R A.Integrated guidance and control for homing missiles[J].Johns Hopkins Applied Physics Laboratary Technical Digest,2004,25(2):121- 139.
[8]Menon P K,Sweriduk G D,Ohlmeyer E J,et al.Integrated guidance and control of moving-mass actuated kinetic warheads[J].Journal of Guidance,Control,and Dynamics,2004,27(1):118 -126.
[9]Yin Y X,Shi W,Yang M.Integrated guidanceand control based on dynamic inverse and extended state observer method[J].Systems Engineering and Electronics,2011,33(6):1342- 1345.(尹永鑫,石文,杨明.基于动态逆和状态观测的制导控制一体化设计[J].系统工程与电子技术,2011,33(6):1342- 1345.)
[10]Duan G R,Hou M Z,Tan F.Adaptive integrated guidance and control law design using sliding-mode approach[J].Acta Armamentarii,2010,31(2):191- 198.(段广仁,侯明哲,谭峰.基于滑模方法的自适应一体化导引与控制律设计[J].兵工学报,2010,31(2):191- 198.)
[11]Wu P,Yang M.Integrated guidance and control design for missile with terminal impact angle constraint based on sliding mode control[J].Journal of Systems Engineering and Electronics,2010,21(4):623- 628.
[12]Dong F Y,Lei H M,Zhou CJ.et al.Research of integrated robust high order sliding mode guidanceand control for missiles[J].Acta Aeronautica et Astronautica Sinica,2013.34(9):2212- 2218.(董飞垚,雷虎民,周池军,等.导弹鲁棒高阶滑模制导控制一体化研究[J].航空学报,2013,34(9):2212- 2218.)
[13]Chawla C,Padhi R.Neuro-adaptive augmented dynamic inversion based PIGC design for reactive obstacle avoidance of UAVs[C]∥Proc.of the AIAA Guidance,Navigation and Control Conference and Exhibit,2011,1- 25.
[14]Wang X,Wang J.Partial integrated missile guidance and control with finite time conver-gence[J].Journal of Guidance,Control,and Dynamics,2013,36(5):1399- 1409.
[15]Padhi R,Chawla C,Das P G,et al.Partial integrated guidance and control of surface-to-air interceptors for high speed targets[C]∥Proc.of the IEEE American Control Conference,2009:4184- 4189.
[16]Padhi R,Das P G,Chawla C.Time scale separated nonlinear partial integrated guidance and control of interceptors in the terminal phase[C]∥Proc.of the IEEE Control Applications& Intelligent Control,2009:1081- 1086.
[17]Swaroop D,Hedrick J,Yip P,et al.Dynamic surface control for a class of nonlinear systems[J].IEEE Trans.on Automatic Control,2000,45(10):1893- 1899.
[18]Du J,Deng T,Yao H,et al.Dynamic surface control for a class of high-order nonlinear systems[J].Systems Engineering and Electronics,2014,36(3):546- 552.(杜军,邓涛,姚宏,等.一类高阶非线性系统的动态面控制[J].系统工程与电子技术,2014,36(3):546- 552.)
[19]Xie W,He Z L.Control method with improved disturbance observer[J].Control Theory&Applications,2010,27(6):695-700.(谢巍,何忠亮.采用改进型扰动观测器的控制方法[J].控制理论与应用,2010,27(6):695- 700.)
[20]Khalil H K,Grizzle J W.Nonlinear systems[M].Upper Saddle River:Prentice Hall,2002.
[21]Qian X F,Lin R X,Zhao Y N.Missile flight dynamics[M].Beijing:Beijing Institute of Technology Press,2008.(钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008.)
[22]Hou M Z,Liang X L,Duan G R,et al.Adaptive block dynamic surface control for integrated missile guidance and autopilot[J].Chinese Journal of Aeronautics,2013,26(3):741- 750.
4D integrated guidance and control law for missiles cooperative engagement
WANG Xiao-fang1,ZHENG Yi-yu1,2,LIN Hai1
(1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China;2.Deep Space Exploration Research Center,Harbin Institute of Technology,Harbin 150001,China)
To make sure that missiles can track the desired trajectory to arrive at the designated position at the designated time,through which missiles can realize cooperative penetration and attack,a 4D robust integrated guidance and control law is proposed.The integrated guidance and control model of missile is gotten through reasonable simplification of the 6 degree-of-freedom missile nonlinear model.According to time-scale separation between the translational and rotational dynamics of missile,the model is divided into outer-loop model and inner-loop model,and a robust integrated guidance and control law with two-loop structure is designed.The mo-delling error,parameter perturbation and external disturbance are regarded as continuous and bounded disturbance,and then an adaptive sliding mode controller for outer loop is designed so as to get the commands of thrust,attack angle and sideslip angle.Disturbance observer technique and dynamic surface control theory are combined to design the inner loop controller to get the actuator deflection angle,which can make missiles track the commands from outer loop well.The stability of outer loop and inner loop is proved using Lyapunov stability theory thoroughly,and the relationship between the control accuracy and controller parameters is analyzed.Finally,simulations are conducted on the 6 degree-of-freedom nonlinear model of missile and results demonstrate the effectiveness of the 4D robust integrated guidance and control law.
4D integrated guidance and control;adaptive sliding mode control;dynamic surface control;disturbance observer
V 448.133
A
10.3969/j.issn.1001-506X.2015.04.23
王晓芳(1979 ),女,副教授,博士,主要研究方向为飞行力学、飞行器制导与控制、突防技术。E-mail:wangxf@bit.edu.cn
1001-506X(2015)04-0874-08
2014- 04- 21;
2014- 09- 26;网络优先出版日期:2014- 10- 28。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141028.1612.001.html
国家自然科学基金(11202024)资助课题
郑艺裕(1988-),男,博士研究生,主要研究方向为飞行器轨迹设计、制导与控制。E-mail:zheng.yi.yu@qq.com
林 海(1967 ),男,教授,博士,主要研究方向为飞行器总体设计、飞行器制导与控制。E-mail:flight@bit.edu.cn
猜你喜欢
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27