
基于分数阶参考模型的半主动悬架自适应控制
2015-05-12 09:38:19陈炎冬杨敏
科技创新导报 2015年34期
陈炎冬 杨敏


摘 要:基于分数阶微积分理论,提出一个以含分数阶次力与位移传递函数定义的悬架为参考模型的磁流变阻尼半主动控制悬架自适应控制模型。通过最优控制方法得到参考悬架的最佳参数,由于分数阶微积分的引入,使得参考模型更加精确。采用李雅普诺夫稳定性理论设计得到模型参考自适应控制的自适应控制律,并用Oustaloup逼近算法解算分数阶微积分因子。Matlab/Simulink仿真结果表明,与传统的被动悬架相比,悬架的平顺性和舒适性有一定的提高,且能保证一定的系统鲁棒性,但悬架动位移稍有增大。
关键词:悬架 分数阶 自适应控制 仿真
中图分类号:TP13;U461.4 文献标识码:A 文章编号:1674-098X(2015)12(a)-0244-04
Abstract:According to the fractional calculus theory, an adaptive control model of a semi-active control suspension with magneto rheological (MR) damping is established ,which the reference suspension model is defined a fractional force and displacement transfer function. The optimal parameters of the reference suspension are obtained by the optimal control method. Due to the introduction of fractional calculus, makes the reference model more accurate. A model reference adaptive control method based on Lyapnov stability theory is used to design adaptive controller, and the solution of fractional calculus factor is realized by the Oustaloups approximation algorithm. The Matlab/Simulink simulation results indicate that, compared with the traditional passive suspension, the primary performances of the new suspension is improved and the system robustness can be guaranteed, but the suspension dynamic displacement increased slightly.
Key Words:Fractional Order;adaptive Control;Simulation;Suspension
20世纪90年代初法国Alain Oustaloup教授[1]基于分数阶传递函数具有等相位特性提出的一种鲁棒控制理论(即“Commmande Robuste dOrdre Non Entier”,其中CRONE是其首字母缩写)。采用CRONE控制方法的悬架(CRONE悬架)由分数阶次的力-位移的传递函数定义的液压气动机械系统替代传统被动悬架的悬架系统,研究结果[2,3]表明CRONE悬架可以提高系统的精度、鲁棒性和稳定性,但存在一些不足,例如:功耗大,控制机构复杂,实现起来比较困难。结合CRONE悬架的优缺点,通过使车辆悬架主要性能最优为目标得到最佳参数,将其作为参考模型,而被控模型采用磁流变阻尼半主动控制悬架模型[4,5,7],研究表明磁流变液控制方便、准确且能耗低的优点刚好克服CRONE悬架的缺点,因此,探究两种模型用模型参考自适应控制结合起来的可行性及有效性。
模型参考自适应控制是自适应控制理论中重要的方法,人们常以最优控制参数确定的标称系统作为自适应控制的参考模型,但最优控制都是基于整数阶微积分理论发展起来的,如果从广义的分数阶微积分角度看,则最优控制理论仍是“局部”最优理论[8]。基于分数阶微积分的最优控制是近几年才兴起,目前仍处于研究的初步阶段,该文提出一种以分数阶控制系统为参考模型的自适应控制策略,根据Lyapnov稳定性理论得到自适应控制律,并对以CRONE悬架为参考模型对车辆的磁流变阻尼半主动悬架进行控制,利用分数阶系统的仿真技术在Matlab/Simulink中验证其有效性。
1 模型建立
1.1 参考模型
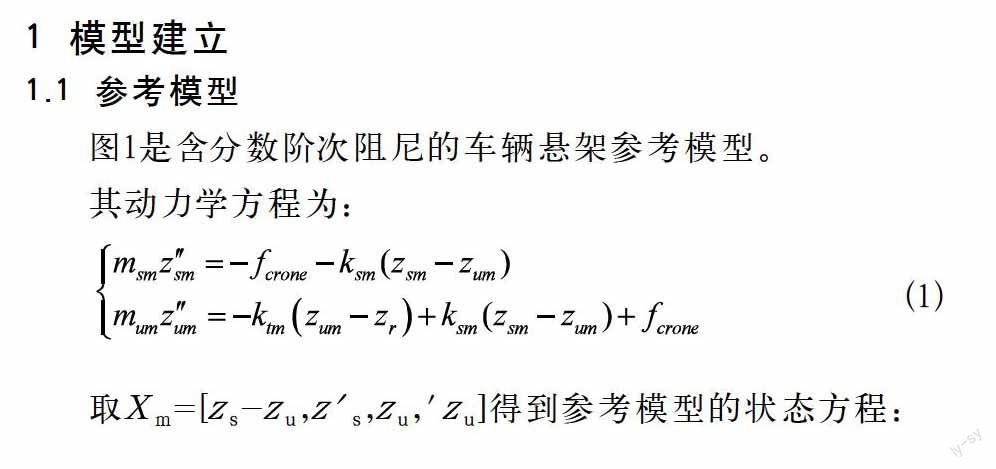
图1是含分数阶次阻尼的车辆悬架参考模型。
2 模型参考自适应控制器
自适应控制系统分为模型参考自适应控制系统和自校正调节器。以含分数阶力与位移传递函数的主动悬架为参考模型,设计一个模型参考自适应控制器。图3为模型参考自适应控制系统的控制图。
3.2 仿真结果
根据上述动力学模型,在Matlab/Simulink中进行建模与仿真,车辆主要仿真参数:msm=400 kg,mum=40 kg,ksm=15800 N/m,ktm=158 000 N/m,cs=3 000 N/(m·s);ms=500 kg,mu=50 kg,ks=19 750 N/m,kt=197 500 N/m;同时以簧载质量加速度、悬架动位移、轮胎动载荷为最优目标时,优化得到参数C0=1 770,α=0.8。
图4~图6重点比较自适应控制悬架、参考模型及被动悬架的性能,图4~图6依次为悬架簧载质量的加速度、悬架动变形、轮胎动载荷。从图4、图6中可看出自适应控制的悬架幅值都要比较被动悬架小,说明该悬架的平顺性、舒适性有明显提高,但从图5中看出,悬架动位移自适应控制模型最大,说明在提高平顺性和舒适性的同时,悬架的动位移有所牺牲但幅度不大。从图4~图6中还可以看出自适应控制悬架能很好的跟踪参考模型。
图7比较了分数阶(α=0.8)与整数阶(α=1.0)参考模型时的加速度响应,可以看出两种控制效果接近,分数阶参考模型的响应有略微的滞后,但响应峰值比整数阶要小的多,所以,分数阶参考模型要比整数阶参考模型更优。图8比较了不同簧载质量(ms=500 kg, ms=450 kg,ms=400 kg)时的加速度响应,表明自适应控制在参数变化的情况下,仍能保持良好的控制效果,也说明系统有较好的鲁棒特性。
4 结语
该文提出一种新的自适应控制悬架模型,参考模型采用含分数阶次的传递函数的主动悬架模型,这样的参考模型优化目标时可调参数多了分数阶次α,可得到更加精确的参考模型,但也增加了系统的复杂性。被控模型采用磁流变半主动控制悬架模型,充分利用了磁流变液的性能使悬架控制更方便准确的实现。仿真表明此模型在悬架的主要性能上有明显的提高,且对参数变化有一定的鲁棒性,但牺牲了部分簧载质量的动位移。
参考文献
[1] Oustaloup,A,Moreau,X,Nouillant,M.The CRONE suspension[J].Control Engineering Practice,1996,4(8):1101-1108.
[2] Xavier Moreau,C.Ramus-serment,Alain Oustaloup,.Fractional Differentiation in Passive Vibration Control[J].Nonlinear Dynamics,2002(29):343-362.
[3] Xavier Moreau,Olivier Altet Alain Oustaloup. The Crone Suspension:Modelling and Stability Analysis”[C]//Proceedings of DETC.03 ASME 2003 Design Engineering Technical Conferences and Computers and Information in Engineering Conference Chicago,Illinois,USA,September .2003.
[4] Ioan Bica.Damper with magnetorheological suspension[J].Journal of Magnetism and Magnetic Materials,2002(24):196-200.
[5] 余森,黄尚廉.汽车磁流变半主动悬架控制系统研究[D].重庆大学,2003.
[6] 齐乃明,秦昌茂,王威,等.数阶系统的最优Oustaloup数字实现算法[J].控制与决策,2010(25):1598-1600.
[7] 周云,谭平.磁流变阻尼控制理论与技术[M].科学出版社,2007.
[8] Om Prakash Agrawal.A general formulation and solution scheme for fractional optimal control problems[J].Nonlinear Dynamics,2004(38):323-337.
猜你喜欢
电脑知识与技术(2016年25期)2016-11-16 14:27:21
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
北京汽车(2016年6期)2016-10-13 17:07:50
计算技术与自动化(2015年3期)2015-12-31 17:09:55
计算技术与自动化(2015年3期)2015-12-31 16:57:45
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
软件导刊(2015年8期)2015-09-18 12:48:03
