
弹道修正机构中舵机的模拟控制方法
2015-04-20 00:44张福新郝永平
制导与引信 2015年2期
张福新, 王 海, 郝永平, 张 健
(沈阳理工大学兵器科学技术研究中心,辽宁 沈阳110159)
0 引言
弹道修正机构中,舵机的空间姿态直接影响到弹丸的飞行轨迹,从而影响弹丸对目标的打击精度。
采用鸭式舵机的弹道修正机构,舵机控制的验证方法是一项关键技术。如果利用靶场射击试验进行验证,将耗费大量财力和物力。本文试图通过模拟舵机技术进行验证。
1 弹道修正机构
在导弹的头部安装修正机构,可使导弹具有弹道修正能力。修正机构与弹体之间通常由螺纹连接。
修正机构由三部分组成:修正部分、控制部分和姿态测量部分。修正部分与弹体之间由深沟球轴承相连,两者可自由转动。控制部分装有防过载缓冲装置,保护其中的电子器件和轴承装置不被冲击载荷损坏。姿态测量部分通过夹具与修正部分的内腔固连,用来测量弹丸的实时空间位置和速度。
图1为弹道修正机构的气动布局,四个舵片对称布置,两对舵片的偏角朝向相反。一对舵片用来改变弹丸的飞行方向,另一对舵片用来减旋[1]。

图1 弹道修正机构气动布局示意图
2 模拟实验装置的结构
模拟实验装置由五部分组成:风阻电机、模拟风阻机构、联轴器、光电编码器和控制电机。风阻电机为模拟风阻机构提供旋转力矩;模拟风阻机构是一个注入甘油的盒子,风阻电机带动搅拌器搅拌油液,运动油液与模拟风阻机构之间产生摩擦力矩,模拟弹道修正机构中舵机受到的风阻力矩;联轴器将模拟风阻机构和控制电机的轴连接在一起;光电编码器测量模拟风阻机构的转速与停止角度;控制电机的力矩与模拟风阻机构的力矩在联轴器处汇集,通过调整控制电机的力矩实现模拟风阻机构的不同运动状态,如正反转、稳速、定角停止等。
模拟实验装置中模拟风阻机构内腔的直径为66mm,高度为44mm,壁厚为3mm,与联轴器相连部分的轴径为10mm。
模拟风阻机构内装有传递力矩的油液。实验装置运行时,油液处于高速高压旋转运动状态。为防止漏油,采用了O 型橡胶圈与唇型密封圈,提高模拟风阻机构的密封性[2]。
3 模拟风阻机构的控制方法
为了实现对模拟风阻机构进行简单有效的控制,必须研究模拟风阻机构控制方法。
在对模拟风阻机构停止运作前,应对其零位进行标定,并调节控制电机力矩使它在较低转速下运转。
在零位处,使控制电机开始工作,设预期停止角度 和 零 位 之 差 是 固 定 值:0°,45°,90°,135°,180°,225°,270°,315°,360°。
若使模拟风阻机构停止在某一预期位置角Φ处,根据物体定轴转动的能量方程MΦ =J(ω22-ω21)/2,可得如式(1)所示的模拟风阻机构停止在预期位置处所需的合力矩。

式中:M 为模拟风阻机构停止在目标位置所需的合力矩;J 为装置中转动构件的等效转动惯量;ω1为模拟风阻机构初始状态角速度;ω2为模拟风阻机构末状态角速度;Φ 为目标停止角度。
通过对模拟风阻机构的力矩分析,可得到控制模拟风阻机构电机需要的电磁力矩,如式(2)所示。

式中:Me1为控制电机的电磁力矩;Me2为模拟风阻机构的力矩;Mf为装置中轴承组的摩擦力矩。
把式(2)代入式(1),可得到如式(3)所示电磁力矩计算式。

式中:模拟风阻机构的角速度ω 由光电编码器测得;模拟风阻机构的力矩Me2根据对模拟风阻机构的仿真计算得到;装置中转动构件的等效转动惯量J 由Pro/E三维建模软件计算得出;装置中轴承组的摩擦力矩Mf通过测量的数据间接计算得出。给定Me2、Φ、ω1、ω2、Mf、J 后,通过式(3)就可求出控制电机需要的电磁力矩,使模拟风阻机构停在预定的角度[3]。
在控制系统发出对模拟风阻机构的修正指令后,首先通过光电编码器采集模拟风阻机构的零位,然后以式(3)计算出的电磁力矩Me1迅速控制电机,使模拟风阻机构停止动作[4-5]。
4 模拟风阻机构的控制流程
模拟控制系统对模拟风阻机构的转速和停止角度进行控制。控制系统由STC89C52 单片机、电阻控制电路以及运行控制程序的电脑等组成。实验中,模拟风阻机构的转速由光电编码器实时测量,转速信息经单片机处理后,进行数码显示,并反馈到控制系统,控制系统不断调整控制电机的外接电阻,以平衡模拟风阻机构受到的摩擦力矩,使模拟风阻机构保持在某一稳定速度或停止的运动状态。停止角度也由光电编码器测得。
根据系统控制要求,可完成控制流程的设计,控制流程如图2所示。图中,Φ1和Φ 分别表示模拟风阻机构的实际预期停止角度和理论预期停止角度,n1和n分别表示模拟风阻机构的实际转速和理论转速。根据实验要求,模拟风阻机构预期停止角度误差应控制在±2°范围内,模拟风阻机构的转速误差应控制在±1r/min范围内。
实测得到的模拟风阻机构的实际预期停止角度和理论预期停止角度,以及模拟风阻机构的实际转速和理论转速如表1所示。

图2 模拟控制系统的控制流程
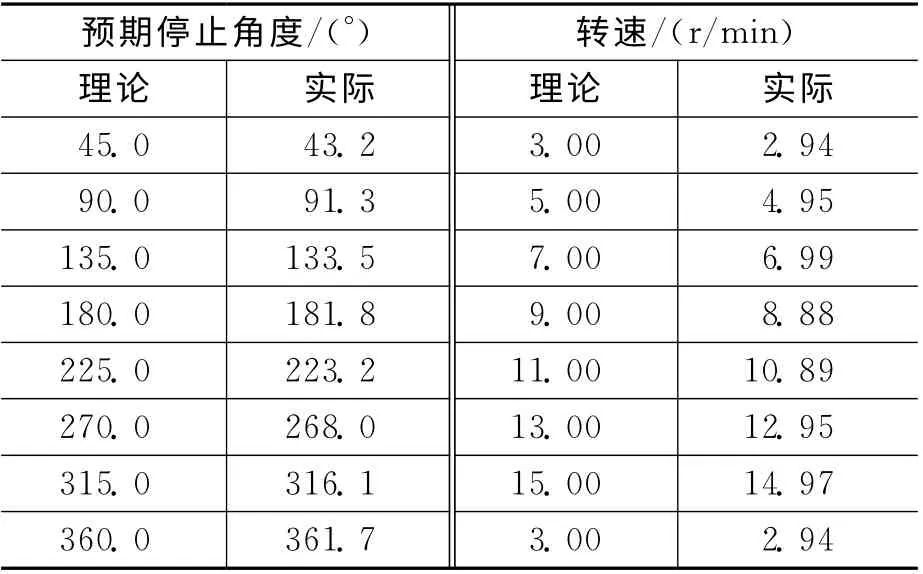
表1 预期停止角度、转速的理论值与实际值
由表1可以看出,模拟风阻机构的目标停止角度误差均在±2°范围内。模拟风阻机构的实际转速略小于理论转速,主要原因是装置中轴承组的摩擦力导致的。
5 控制模拟风阻机构的驱动电路
在控制电路中,选用STC89C52单片机。由于定值水泥电阻散热快,可用作可控电阻模块,其可控制范围在(4~15)Ω,电阻最小值之所以设置为4Ω,可避免控制电流过大,烧毁控制器件。由于可控电阻模块的电阻变化具有非连续性,根据系统控制流程的要求,在模拟风阻机构进行稳速和停止动作控制前,系统先加载一个与最终稳速和停止动作需要的阻值差不多的电阻,再根据偏差进行对电阻值的微调,在微调时采用四个1Ω电阻并联,因此最小微调电阻值为0.25Ω。
控制过程:在单片机发出指令后,经光耦、放大器和图腾柱电路,使5 V 的信号电压放大到15V的控制信号电压,从而使场效应管可以迅速启动。
控制模拟风阻机构的驱动电路简图,如图3所示[6]。图中的释放电路的作用:在场效应管切断后,使电路与大地相连形成释放回路,起保护作用。

图3 控制模拟风阻机构的驱动电路
6 总结
本文介绍了模拟弹道修正机构的实验装置。装置中,风阻电机带动搅拌器搅拌油液,运动油液与模拟风阻机构之间产生的摩擦力矩,用来模拟弹道修正机构中舵机受到的风阻力矩。控制电机发出的力矩与模拟风阻机构的力矩在联轴器处汇集,通过调整控制电机的力矩,可改变模拟风阻机构的运动状态。实验测得模拟风阻机构的转速误差和预期停止角度误差均在允许范围内,表明该模拟控制方法的控制原理可行。
[1] 王晓宇,张嘉易,郝永平.滑翔增程弹的气动特性仿真研究[J].成组技术与生产现代化,2014,31(3):32-35.
[2] 李新福,陈白宁,郝永平.弹道修正执行机构中电机的控制方法研究[J].成组技术与生产现代化,2014,31(3):36-40.
[3] 邓四二,李兴林,汪久根.角接触球轴承摩擦力矩特性研究[J].机械工程学报,2011,(5):114-220.
[4] 王磊杰,张红梅.增量式光电旋转编码器及在角减速度测量中的应用[J].机电产品开发与创新,2005,(5):115-118.
[5] 陶仁浩.基于增量式光电编码器的高精度位置检测技术研究[D].南京:南京航空航天大学,2012.
[6] 胡汉才.单片机原理及其接口技术[M].北京:清华大学出版社,2010:74-80.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
放学后(2022年8期)2022-07-18
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
专用汽车(2021年1期)2021-01-29
——编码器
演艺科技(2020年7期)2020-08-13
汽车实用技术(2019年3期)2019-03-05
学生导报·东方少年(2018年28期)2018-05-14
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
