
POS辅助空中三角测量的技术现状概述
2015-04-16 08:25白洪伟吴满意
赤峰学院学报·自然科学版 2015年24期
白洪伟,吴满意
(1.宿州学院 安徽省煤矿勘探工程技术研究中心,安徽 宿州 234000;2.国家测绘地理信息局第一地形测量队,陕西 西安 710054)
作为摄影测量学分支之一的航空摄影测量,担负着为国民经济建设和国防建设提供基础空间数据及信息资料的重要任务,是实现数字地球的重要部门.空中三角测量作为航空摄影测量内业成图的第一步,是整个航测过程的核心与精髓,重要性不言而喻,所以历来是人们研究的重点.空中三角测量亦称解析空三加密,传统的手段是量测像片获取像点坐标,并以野外测量的若干分布于特定位置上的地面控制点为基准进行最小二乘平差,确定地面目标的空间位置,这种方式严重依赖地面控制点.而野外控制点的测量历来是一项工作量大、作业成本高的工序,尤其是在无法涉足的无人区或在诸如沙漠、戈壁、大草原、密林区等无法找到合适控制点的地区.因此最大限度的减少外业点数量,甚至实现无控作业一直是摄影测量工作者不断追求的目标.
从20世纪50年代初,人们就着手研究利用各种辅助数据进行空三加密.80年代后期全球定位系统(GPS)被应用于辅助空中三角测量,通过GPS获得投影光束的三个线元素,实现了部分元素的直接获取.近20年以来出现的POS系统利用所记录的航摄仪位置和姿态参数,经过后处理计算出每张航片精确的外方位元素,并加入少量的外业控制成果进行空三加密[1-2].这项技术使传统摄影测量摆脱了对地面控制点的依赖,从而引起摄影测量理论和技术的重大飞跃.
1 惯性导航系统
1.1 惯性导航系统的定位技术
惯性导航系统(INS)是由惯性测量元件(IMU)及导航电脑所组成,这是一种自主式导航系统,其基本原理是根据牛顿力学定律,利用陀螺、加速度计等惯性元件确定载体的位置及姿态.
目前的惯性导航系统都是在被导航的载体中安装一个稳定的平台模拟当地水平面,建立东北天坐标系,该坐标系三个轴分别指向正东e、正北n及天顶方向u,并在这三个轴向上都安装上一个加速度计,直接观测量为载体在这三个方向上的加速度,将这三个加速度分别进行积分就可得到载体在某一时刻沿着三个方向上的速度分量,再对速度积分可得到载体用经、纬度和高程表示的在地球上的位置,就是目前惯性导航系统广泛采用的定位技术方法[3-4].
1.2 惯性导航系统的姿态测量技术
惯性导航系统普遍使用陀螺作为其姿态测量的核心部件.目前业内常用的陀螺主要有以下三类:
(1)DTG(Dry Tuned Gyros动力调谐陀螺).漂移稳定性为0.01-0.05度/时,具有小噪声,小尺寸的优点,但耐冲击性较弱.
(2)RLG(Ring Laser Gyros环型激光陀螺).漂移稳定性为0.001度/时,精度是这三类陀螺中最高的,但体积却是限制其广泛应用的重要因素.
(3)FOG(Fiber Optic Gyros光纤陀螺).漂移稳定性0.01-10度/时,精度是三者中最低的,优点是噪声小,尺寸较小,且耐冲击能力较强.
POS辅助空中三角测量中要求陀螺尺寸小、漂移小、体积小并且能够抵抗由于一些特殊原因下的冲击.因此综合考虑,目前这一方面应用最为广泛的是FOG.
2 GPS与INS组合技术
2.1 GPS与INS组合的需求分析
一方面,GPS和INS性能的互补性和客观应用的需要,促使二者走向了一起.GPS具有恒定高精度的优点,但动态性较差,且易受到外界因素的干扰.INS精度和动态性都较高,且是自主导航系统,受外界条件的干扰小,但误差会随时间积累.二者在性能上有着得天独厚的互补关系,在实际应用中,也确实有这方面的需求;另一方面,计算机技术的进步也为二者组合的发展创造了一个很好的技术条件,现代控制理论的成就,特别是最优估计理论的数据处理方法,为二者组合提供了理论基础,加之近些年GPS和INS在精度不断提高的同时成本也在不断降低.综上所述,无论是从主观需求还是客观条件,二者的组合的现状势在必行.其组合技术流程如图1所示:
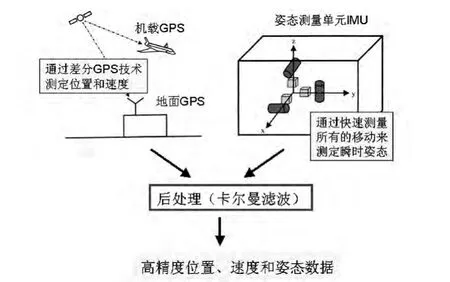
图1 POS组合系统的原理图
2.2 GPS与INS组合的特点
(1)精度高.高精度GPS信息作为外部测量值输入,在载体运动过程中不断修正INS,以弥补其误差随时间积累的缺陷,而INS的高频定位解算结果则解决了GPS在动态环境中由于信号失锁和周跳导致的精度下降问题.因而组合系统的精度要比单独的GPS或INS的都高.
(2)抗干扰能力强.GPS易受到外界因素的影响而导致精度降低,而INS抗干扰能力较强且是自主导航,因此当GPS信号受到干扰时,INS的导航解可作为辅助信息,对GPS信号再捕获起辅助作用,从而提高接收机的跟踪能力.而GPS信息可辅助INS在运动中不断进行初始对准.
(3)解决了GPS动态应用采样频率低的问题.GPS数据采样率低的缺点使其在某些时候不能达到诸如航空摄影之类的动态应用要求,而INS频率却很高,此时高频INS数据可以在GPS定位结果之间高精度内插事件发生的位置,如航摄仪曝光瞬间的位置,从而保证了组合系统对整个测区各个摄影位置的高精度定位.
(4)对INS的要求降低.长期以来,INS高昂的价格是限制其广泛应用的主要因素.而组合系统主要利用INS的速度信号解决GPS的动态跟踪问题,而高精度定位则由GPS来实现,因而即使采用较廉价,性能较低的INS,在绝大多数时候也能达到要求.
3 POS辅助空中三角测量的技术
目前POS辅助空中三角测量广泛采用的技术方法是将获取的每张像片的外方位元素作为带权观测值参与摄影测量区域网平差,以获得更高精度的像片外方位元素成果,国际上称之为集成传感器定向,简称ISO(Integrated Sensor Orientation),ISO的产生和摄影测量、非摄影测量观测值的联合平差的发展密不可分.联合平差以摄影测量观测值为主,综合利用非摄影测量信息,采用统一的数学模型和算法,整体测量点位并对其质量进行评价.它使像片控制点的测定精度不断提高,从而带动了辅助设备迅速发展和使用,以及各学科、专业间的相互渗透[5-7].
3.1 POS辅助空中三角测量的技术原理
传统的空中三角测量是量测像片连接点并观测足够数量的控制点,进行自检校区域网平差.其数学基础是经过变换后的共线方程.
POS辅助空中三角测量就是将POS获得的数据代入到空三运算中,利用像片量测的连接点和观测的地面控制点作为辅助数据,以获得更高精度的结果.
3.2 现行POS辅助空中三角测量系统的改造状况
POS辅助空中三角测量的第一步是要采用载波相位动态GPS定位技术测定摄站坐标以及采用惯性导航技术测定航摄仪的姿态角.为此,必须对现行航空摄影系统进行改造.图2所示为捷联式惯性导航系统的改造示意图,即在飞机顶部安装动态航空GPS天线,在航摄仪上固联INS.系统中的GPS、INS和航摄仪通过计算机控制协同工作,可在曝光的瞬间获取航摄仪的空间位置和姿态角.
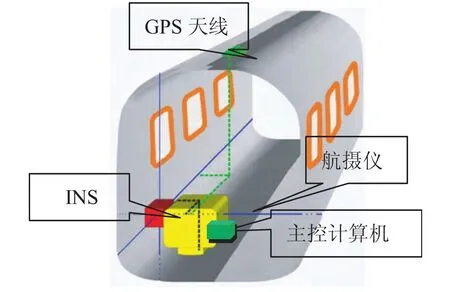
图2 航空摄影系统改造示意图
3.3 POS辅助空中三角测量的技术方法
(1)观测值系统误差模型
目前空中三角测量广泛采用的是光束法.对于POS辅助光束法区域网平差,像点坐标、GPS测定的摄站坐标和INS测定的航摄仪姿态角这三数据被作为原始观测值.由于底片变形、镜头畸变等因素的影响,像点坐标观测值存在着系统误差,一般采用带3个附加参数的Bauer模型对其进行补偿.
(2)区域网平差的误差方程
在POS辅助空中三角测量的联合平差过程中,将像点坐标、GPS摄站坐标和INS姿态角作为观测值,将物点地面坐标、影像外方位元素和各种系统误差改正参数作为待定参数.由于航摄仪内方位元素在出厂时已经过检定,因此在未知数近似值邻域范围内对POS系统各个观测方程按照泰勒级数展开到一次项即可得以矩阵形式表示的误差方程.
当用POS系统测定了区域网内的m张影像的6个定向参数并量测n个像点后,则可列出6m+2n个方程,这6m+2n个方程即构成了POS辅助光束法区域网平差的基础误差方程.若依照像点坐标、POS提供的摄站坐标及姿态角的测量精度,分别给予这三者观测值不同的权重,则可用最小二乘法求解物点的地面三维坐标和像片外方位元素的数值.
3.4 现行POS辅助空中三角测量的技术缺陷
尽管目前的POS辅助空中三角测量技术正逐步完善,但这种作业方式在某些方面依然存在缺陷,直接影响到空三加密的成果.这些缺陷主要体现在以下方面:
(1)机载GPS定位精度不高.GPS定位精度主要受到两个方面因素的影响,一是GPS信号接收因素,如信号失锁、大气折射、多路径效应等,二是GPS处理技术,如采用伪距差分和采用载波相位差分所能够达到的精度是不同的.
(2)INS姿态测量精度不高.在POS辅助空中三角测量中,姿态是通过INS测量的.一方面源于系统的本身存在的各种漂移,加速度计也存在动态误差,另一方面,INS的核心部件——陀螺制造工艺复杂,目前基本处于垄断态势,各国对其出口陀螺的精度也进行了限制,两方面因素共同影响了姿态测量的精度.
(3)GPS和INS仍然无法完善集成.由于目前的航空摄影测量系统是由航摄仪和机载POS通过固联进行集成,并非一个整体,因此不可避免的存在联接误差.此外航摄时相机会有不同角度的倾斜或旋转,导致摄影前测定的偏心分量与摄影时刻不一致.
(4)就目前的技术状况而言,GPS、INS与航摄仪三者很难同步,即不可能做到GPS和INS同时记录在摄影瞬间的数据.
(5)航摄仪内方位元素的变化.航摄仪的内方位元素在出厂时已经过试验室的检定,一般视为已知值.但在试验室检定时无法充分顾及动态航摄条件对于内方位元素的影响,再加上时间和环境等因素,导致飞行时航摄仪的内方位元素存在着固定误差.而在空中三角测量解算过程中,由于内方位元素是作为已知值参与计算的,所以它对解算结果将会有直接影响.
3.5 POS辅助空中三角测量的发展趋势
最初的航空摄影测量并无空中三角测量这一步骤,所有的标准点位点全部靠野外业实测.加密的出现减少了外业控制点的数量,提高了工作效率.在经历了模拟、解析阶段后,空中三角测量今非昔比,已发展到了GPS和POS辅助空三,将航空摄影测量推到了一个新的高度.现如今人们依然在不断探索减少地面控制点的方法,追求更高自动化程度的目标.目前POS辅助空中三角测量已日渐成为主流,然而这也只是一个过渡阶段,这种方法发展的最终阶段又会回到无空三,实现POS数据的直接定向(DG:Direct Georeferencing)[8-9].
POS系统可以获取载体的位置和姿态信息,解算外方位元素参与区域网平差用于辅助空中三角测量.然而,当解算获得的外方位元素的精度足够高时,就可以直接应用外方位元素的前方交会法进行地面点定向,从而取消外业控制点和空三加密两个常规过程,实现由航空摄影直接到内业成图.由此可见,ISO与DG最大的区别是是否进行区域网平差.
在DG中必须精确修正GPS天线相位中心、INS中心、航摄仪投影中心三者之间的偏心分量以及INS坐标系各轴与航摄仪坐标系各轴之间的偏心角.偏心分量可以采用精密仪器在飞行前进行实测.偏心角和线元素偏移量则需要在地面检校场上空进行实际航摄,然后用常规空三的结果反求姿态的系统偏差.所以检校场的精度结果对DG是至关重要的.
DG是摄影测量工作者孜孜追求的目标,目前随着GPS和INS精度的不断提高,使其逐渐成为可能.虽然DG的精度不如空中三角测量,但已经可以用于正射影像图及小比例尺地形图项目中,这样将大大节省时间和费用,尤其是在环境恶劣地区,其优势是常规空三所无法比拟的.然而DG在应用于立体测图时,不可避免的出现个别模型中视差较大现象.因此利用DG进行大比例尺立体测图目前还不可靠,这也是未来需要深入研究的问题.
4 结论
POS辅助空中三角测量是近几年来才发展起来的新兴技术,涉及范围很广.除了航空摄影的范畴外,还涉及GPS测量、惯性导航等软硬件设备的理论和方法.可以预见,随着POS技术在国内的日益发展和广泛应用,必将为传统的摄影测量带来一场革命,这是也航空摄影测量技术未来的发展趋势.
然而目前POS系统对于空中三角测量只起到了辅助作用,未能充分发挥出其作为当今世界上最先进的航空摄影测量手段的巨大潜能,且存在一定的缺陷.但不可否认的是,它必将成为未来航空摄影测量的主流手段.随着科技的发展及基础条件的提高,进一步改进设备的制造工艺和改善设备的精度,最终取消外业像控及空中三角测量过程,全面实现DG,达到从航摄直接成图,是每个摄影测量工作者的共同目标.
〔1〕董绪荣,等.GPS/INS组合导航定位及其应用[M].长沙:国防科技大学出版社,1998.
〔2〕袁修孝.GPS辅助空中三角测量原理及应用[M].北京:科学出版社,2001.13~40,57~97.
〔3〕张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.41~75.
〔4〕李德仁.GPS用于摄影测量与遥感[M].北京:测绘出版社,1996.
〔5〕许江宁.陀螺原理及应用[M].北京:国防工业出版社,2005.6~10.
〔6〕吴俊伟.惯性技术基础[M].哈尔滨:哈尔滨工程大学出版社,2002.90~96.
〔7〕吴俊.GPS/INS辅助航空摄影测量原理及应用研究[D].郑州:解放军信息工程大学,2006.
〔8〕袁修孝.POS辅助光束法区域网平差 [J].测绘学报,2008,37(3):342~347.
〔9〕赵俊羽.GPS辅助空中三角测量在大比例尺航空摄影测量中的实验研究[D].昆明:昆明理工大学,2010.
猜你喜欢
哈尔滨理工大学学报(2020年6期)2020-05-27
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年4期)2017-11-23
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
科技创新与应用(2017年4期)2017-03-27
中国工程咨询(2017年12期)2017-01-31
中国房地产业(2016年9期)2016-03-01
安徽地质(2016年4期)2016-02-27
中国非金属矿工业导刊(2015年5期)2015-12-22
