
果园避障旋耕机液压系统的设计与研究
2015-04-16 09:26:22,,,,,
液压与气动 2015年8期
, , , , ,
(1.石河子大学 机械电气工程学院, 新疆 石河子 832000;2.第一师农机技术推广站, 新疆 阿拉尔 843300; 3.阿拉尔 万达农机有限公司, 新疆 阿拉尔 843300)
引言
新疆是全国林果业生产供应基地,有“瓜果之乡”的美誉。林果业作为新疆的特色产业,已经成为四大支柱产业之一。新疆具有发展林果业得天独厚的优势,2012年全疆果园种植面积101.5万平方公里, 林果产量736.74万吨,均居全国前列,但由于机械化水平不高,严重制约了新疆林果业的发展。
果园机械化可以节约生产成本,降低劳动强度,提高工作效率,是林果业发展的必然趋势。耕整地作为果园机械化的首要和基础环节,可以改善土壤物理特性,抑制杂草和病虫害,并起到增温保墒的效果。目前果园中耕一般采用旋耕机,旋耕机具有很强的切土、碎土能力,一次作业就能使土壤松碎,土肥掺和均匀,拖拉机功率可以得到充分利用,且耕后地表平整,有利于抗旱保墒,提高产量。
通过查阅文献和实地调研,发现目前新疆地区的果园旋耕作业存在以下问题:
(1) 由于采用“矮化密植”的园艺种植模式,果树行距较小,旋耕作业普遍以微耕机为主,作业幅宽受到限制;同时,机具操作复杂、劳动强度大、效率低,耕作效果不能满足农艺要求。
(2) 采用大田作业旋耕机工作时,果树树干是旋耕作业时的障碍物,受耕作对象的局限,目前旋耕机作业时为了避让果树,在果树株距之间的区域存在少耕、漏耕现象。
资料显示,目前国内关于解决果园避障问题的旋耕机的研究刚刚起步,解决上述技术难题的新型果园旋耕作业机具尚属空白。因此,研究设计一款适于新疆果园种植模式的果园避障旋耕机迫在眉睫。
1 果园避障旋耕机液压系统
1.1 液压系统工作原理
果园避障旋耕机由机架、旋耕刀工作部件、避障系统以及动力分配系统等集成,避障系统由感应机构、液压控制系统等部件组成,果园避障旋耕机工作原理如图1所示。
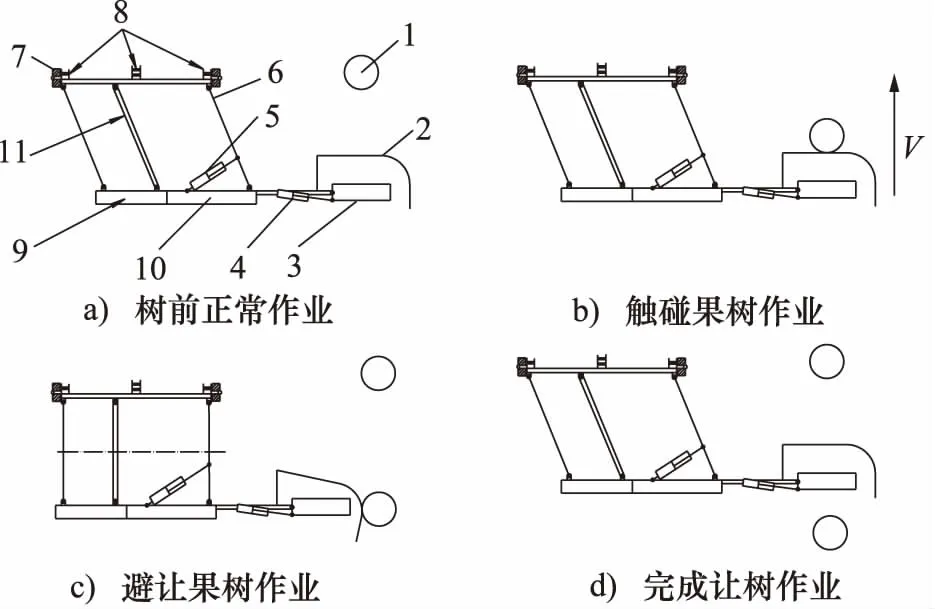
1.果树 2.机械触杆 3.作业部件 4.调平液压缸 5.伸缩液压缸 6.铰接平行四杆机构 7.支架轮 8.牵引铰接点 9.液压油箱 10.传动箱 11.中间拉杆图1 果园避障旋耕机工作原理图
旋耕机前进作业时,感应机构未碰触果树及障碍物时机具正常作业,液压系统不工作,如图1a;当碰触果树及障碍物后,感应机构发出指令给液压系统,控制液压控制阀块的油路通断,如图1b,进而控制液压缸动作,驱动机架上的平行四杆机构摆动,由平行四杆机构带动旋耕作业部件水平横向移动并规避障碍物,避免对果树的损伤和遇到障碍物时对机具的损坏, 如图1c。当避让过程结束后,工作部件再次横向伸出,以此往复循环作业,如图1d。在工作区域内,可以对果树之间的部分进行有效耕作,防止出现少耕、漏耕现象。液压系统原理如图2所示。

1.液压油箱 2.液位计 3过滤器 4.直动溢流阀 5.外啮合齿轮液压泵 6.可调节流阀 7.截止阀 8.压力阀 9、10.二位四通电磁换向阀 11.二位三通机动换向阀 12.平衡阀 13、14.液压锁 15、16.液压缸图2 避障机构液压系统原理图
果园避障旋耕机液压系统由伸缩缸回路和调平缸回路组成。液压伸缩回路包括液压油箱1、直动溢流阀4、外啮合齿轮式液压泵5、节流阀6、截止阀7、二位四通电磁换向阀9、二位三通机动换向阀11、液压锁13、伸缩缸15;液压调平回路包括液压油箱1、直动溢流阀4、外啮合齿轮式液压泵5、二位四通电磁换向阀10、平衡阀12、液压锁14、调平缸16。
1.2 元件选型
1) 液压缸的选择
在液压系统中有两个液压缸,分别为调平缸和伸缩缸,下面对两组液压缸进行设计选型。
(1) 调平缸 调平缸控制平行四杆动作,活塞直径(或缸筒内径)公式:
(1)
式中:D—— 活塞直径或缸筒内径,m
F—— 液压缸推力,N
ηcm—— 液压缸的机械效率,取0.94
p1—— 进油路初选压力,取10 MPa
p2—— 回油路背压,简单系统取0.2 MPa
φ—— 杆径比,取0.7
由式(1)得:D=0.04 m,按GB/T 2348-1993,将液压缸内径圆整为D=40 mm,故活塞杆直径d=40×0.7=28 mm,圆整为d=28 mm,根据行程要求,按GB/T 321-2005行程第一系列,选择行程s=320 mm,型号为YHG1-16 40/28*320LJ-HOt2。
(2) 伸缩缸 伸缩缸的设计、计算和选型同上述调平缸,型号为YHG1-16 63/45*500LJ-HOt2,表1为两缸的参数。

表1 调平缸和伸缩缸的参数
2) 液压泵的选择
(1) 泵的最大工作压力pP(Pa) 系统液压泵的最大工作压力取决于调平缸和伸缩缸在满载时的工作压力,即为5 MPa,泵的最大工作压力:
pP≥p1+∑Δp
(2)
式中:p1—— 调平缸和伸缩缸的最大工作压力之和
∑Δp—— 工作油路的总压力损失,可以按照表2选取;该系统属于简单系统,选取0.25 MPa

表2 系统总压力损失的选取
由公式(2)计算泵的最大工作压力为:
pP=p1+∑Δp=5+0.25=5.25 MPa
(2) 泵的最大流量qP(L/min) 液压系统泵的最大流量取决于系统所需流量qV,流量公式为:
qP≥qV=K(∑q)max
(3)
式中:qV—— 系统所需流量,L/min
K—— 系统泄漏系数,经验值为1.1~1.3,该系统属于大流量系统,取1.15
(∑q)max—— 调平缸和伸缩缸同时动作时所需流量之和,L/min
由于本系统中,调平缸先动作,伸缩缸后动作,两缸工作行程互不干扰,由公式(3)计算液压系统齿轮泵的最大流量为:
qP≥qV=K(∑q)max=K·(q伸max+q调max)
=1.15×4.05=4.66 L/min
(3) 选择液压泵的规格 根据上述计算得到pP=5.25 MPa,qP=4.66 L/min,由相关液压手册选择相应的液压泵。根据系统所需流量、拟定初选液压泵的转速、泵的容积效率,可以得到泵的排量参考值为:
(4)
式中:Vg—— 泵排量参考值,L/min
n1—— 初选液压泵转速,r/min
ηV—— 液压泵容积效率
由公式(4)计算得液压系统泵的排量为:
(4) 选择液压泵的型号 根据上述计算得到的压力、流量和排量等参数,查相关液压手册,最终确定泵为CB型外啮合齿轮泵,型号为:CB-B。
2 系统仿真分析
2.1 系统建模
在众多液压系统仿真软件中,AMESim可以建立较为复杂的液压系统模型,被广泛应用于液压系统的设计当中。果园避障旋耕机液压系统工作时,齿轮泵同时驱动伸缩缸和调平缸,其中伸缩缸控制主机架快速运动,调平缸控制旋耕装置动作。在AMESim环境下,搭建果园避障旋耕机液压系统仿真模型如图3所示。
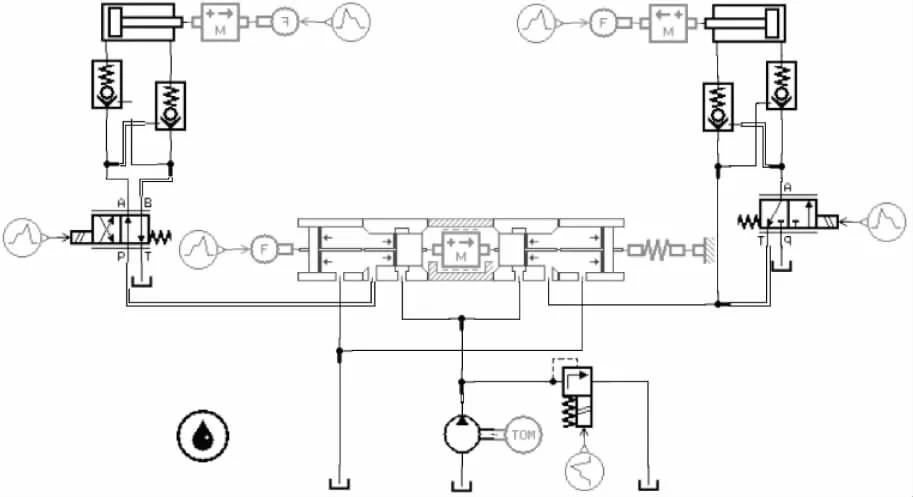
图3 果园避障旋耕机液压系统仿真模型
2.2 系统参数设置
系统模型搭建完成后,参数设置如表3所示。
2.3 系统仿真结果及分析
仿真模型中,仿真时间设置为3.5 s,通信间隔为0.01 s,运行仿真。图4为伸缩缸和调平缸输出位移曲线;图5为伸缩缸和调平缸输出速度曲线。
(1) 由图4可以看出,在模拟实际工况下,伸缩缸和调平缸的位移曲线从第0.00 s开始,在第1.05 s时,伸缩缸曲线位于调平缸下端,且由斜率可以看出在0.00~1.05 s时液压泵的油液分别给伸缩缸和调平缸
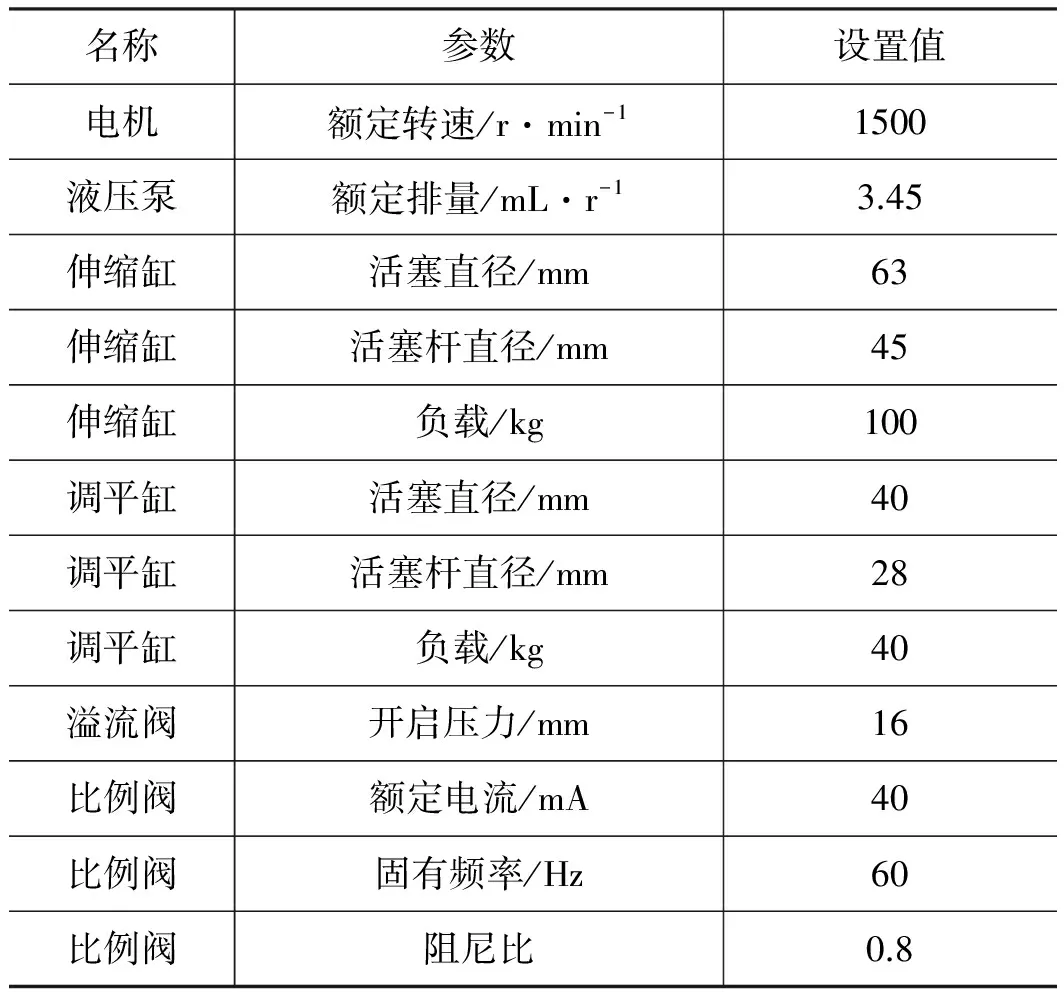
表3 参数设置
供油,且伸缩缸差动连接的速度小于调平缸的速度(两缸杆径比不一样);1.05 s时调平缸到达行程终点, 曲线上的波动是由于平行四杆机架在回至初始位置时惯性力产生的反向作用力导致,由于负载较大,在0.30 s后恢复终点位置; 1.05 s之后, 伸缩缸继续运动, 调平缸停止动作, 液压泵输出流量均给伸缩缸供油,所以伸缩缸在1.05至1.50 s时,曲线斜率增大,直至第1.50 s运动至行程终点。满足系统的设计要求,同时验证了模型的正确性。

图4 伸缩缸和调平缸位移曲线
(2) 由图5可以看出,在0.00~0.05 s时伸缩缸和调平缸均已达到工作速度,且速度曲线平滑没有波动,至1.10 s时调平缸运动至终点速度为零,此时油泵只给差动连接的伸缩缸回路供油,流量增加导致伸缩缸速度增大,到第1.50 s时,伸缩缸运动至行程终点速度变为零。符合设计要求,再次验证了系统中各元件选型及其工作参数设置的合理性。

图5 伸缩缸和调平缸输出速度曲线
(3) 结合图4、图5,液压系统工作时,当机械触杆碰到障碍物时,调平缸和伸缩缸分别以0.304 m/s和0.25 m/s的速度动作,1.05 s时,调平缸运动至终点,此时避免主机架与障碍物碰撞,需要伸缩缸带动机架迅速退回,油液均给伸缩缸供油,所以回路差动连接速度增大至0.50 m/s,当机械触杆离开障碍物时,伸缩缸复位,速度降为0.00 m/s,完成一次避障运动,符合系统设计要求。
3 结论
(1) 通过对果园避障旋耕机的工况进行分析,设计了相应的液压系统,并对主要元件进行了选型;
(2) 液压系统采用单泵供双回路工作方式,且伸缩缸回路采用差动连接方式,系统工作稳定、响应快,各个子系统工作相互独立稳定、操作便捷、系统能耗小、效率高;
(3) 运用AMESim仿真软件搭建果园避障旋耕机液压系统,并对系统中的元件进行了参数设置,通过HCD库搭建同步阀模型得到伸缩缸和调平缸速度分别为0.304 m/s和0.250 m/s,且差动连接速度为0.500 m/s,满足实际工作的要求,验证了该模型的正确性,为产品的开发和进一步改进提供了理论依据。
参考文献:
[1] 中华人民共和国国家统计局.中国统计年鉴2013[M].北京:中国统计出版社,2014.
[2] 成大先.机械设计手册[M].北京:化学工业出版社,2008.
[3] 毕新胜.液压与气压传动[M].北京:北京航空航天大学,2010.
[4] 李壮云.液压元件与系统[M].北京:机械工业出版社,2011.
[5] 王益群.液压工程师手册[M].北京:化学工业出版社,2011.
[6] 付永领.LMS Imagine.Lab AMESim系统建模和仿真实例教程[M].北京:北京航空航天大学出版社,2011.
猜你喜欢
现代制造技术与装备(2021年9期)2021-04-03 13:44:40
冶金设备(2020年2期)2020-12-28 00:15:26
重型机械(2020年2期)2020-07-24 08:16:20
农民致富之友(2020年17期)2020-06-19 08:32:52
通信电源技术(2018年5期)2018-08-23 01:15:34
现代农机(2016年4期)2016-09-18 01:01:49
湖北农机化(2016年5期)2016-03-08 12:15:43
石油化工建设(2015年6期)2015-12-01 04:17:35
实用手外科杂志(2015年4期)2015-08-27 01:54:20
中国修船(2014年5期)2014-12-18 09:03:08
