
基于多源定位数据的实时船舶监控系统设计❋
2015-03-15 08:22黄海广胡乃军仇志金孔祥伦郭忠文
中国海洋大学学报(自然科学版) 2015年9期
黄海广, 胡乃军, 仇志金, 孔祥伦, 郭忠文
(1.中国海洋大学信息科学与工程学院, 山东 青岛 266100; 2.温州市海洋渔业船舶安全救助信息中心, 浙江 温州 325000;3.青岛市工商行政管理局信息中心, 山东 青岛 266071; 4.中国交通通信信息中心, 北京 100011)
基于多源定位数据的实时船舶监控系统设计❋
黄海广1,2, 胡乃军3, 仇志金1, 孔祥伦4, 郭忠文1
(1.中国海洋大学信息科学与工程学院, 山东 青岛 266100; 2.温州市海洋渔业船舶安全救助信息中心, 浙江 温州 325000;3.青岛市工商行政管理局信息中心, 山东 青岛 266071; 4.中国交通通信信息中心, 北京 100011)
船舶监控涉及多类异构数据源,互联难度大。本文提出了一种采用多源定位数据的实时船舶监控系统(Vessel Monitoring System,VMS)设计方案,解决了多源异构数据的互联问题。该方案通过可扩展接口采集各类船舶终端的定位数据,采用多源定位数据融合算法,实现了实时显示船舶位置及快速回放船舶航行轨迹,并能与不同类型的船舶终端交互信息。经实际验证,该系统有效可行,对于促进中国船舶监控物联网发展具有重要作用。
VMS;AIS;电子海图;多源定位数据
为了加强目标船舶的识别能力,提高航行安全,国际海事组织(International Maritime Organization,IMO)对大中型船舶配备船舶自动识别系统(Automatic Identification System,AIS)设备作出了强制规定,AIS逐渐在船舶中得到广泛应用[1]。近年来,相关管理部门在沿海架设AIS基站,用于接收船舶发送的AIS信息,在中国沿海形成了AIS监控网络,使用近海船舶的AIS数据用于船位监控及航运交通管理[2]。北斗卫星船载终端[3]、海事卫星船载终端已经广泛用于商船、渔船等船舶,并通过卫星网络传输定位数据。定位数据用于船舶监控系统(Vessel Monitoring System,VMS)。VMS通过接收到的船舶定位数据,在GIS平台上实时显示船舶位置。通过定位数据库的查询,可以对单船、多船进行航行轨迹回放;部分VMS实现了与独立终端通信。VMS通常采用国外产品,其界面直观友好,准确性高,在海事、航运交通方面起到重要作用[4]。
然而,目前使用的VMS,普遍存在以下不足:
(1)由于AIS信号接收受到距离(30~60海里)限制,平台只能接收到近海船舶AIS数据,因此只采用AIS作为数据来源的VMS只能显示近海船舶,具有很大局限性。由于AIS数据来源于近海基站接收信息,岸站基本只能单向接收数据,无法做到与船舶通信。
(2)由于多源定位数据的异构性,在交互过程中互不兼容,VMS在可以获取多源异构定位数据的前提下,无法做到充分地集成多源定位数据,无法最大限度的发挥已有设备效能,与其他终端通信也存在兼容性问题。如北斗卫星VMS系统,可以同时使用AIS数据与北斗卫星终端的定位数据,但不能利用更多的定位数据源,且只能与北斗卫星终端进行通信。
(3)系统中没有实时气象模块,气象预报不能与实时船位进行关联,无法做到对海上船舶实时预警。
针对现有VMS系统存在的不足,本文提出了一个基于多源定位数据的实时船舶监控系统的设计方案,解决了多源异构数据的互联问题。本文的贡献如下:
(1)通过可扩展接口采集各类船舶终端的定位数据,采用多源定位数据融合算法实时显示船舶位置,并且可以快速回放船舶航行轨迹。
(2)可以接收多种船舶终端发送的信息,也可以对特定船舶终端发送信息。
(3)可以实时同步气象数据。海洋气象关系到海上船舶安全,气象数据与实时船位进行关联,根据台风风圈范围对对风圈范围内的船舶进行警告和提示。
该系统已经在全国各地的海洋、航运交通、渔政管理等领域进行了验证,有效可行,效率高。
1 背景和相关工作
1.1 船舶监控系统
船舶监控系统(VMS)是集全球卫星定位技术(GPS)、地理信息系统(GIS)和电子海图显示与信息系统(ECDIS)技术、计算机通信网络和数据库技术于一体的综合应用系统,由系统数据库、电子海图、地理信息系统、数据统计分析系统、管理信息系统、通信模块以及计算机网络设备组成[5-6]。
VMS包括船载终端与岸上监控平台两部分。船载终端是安装在船舶上、具备全天候船舶定位及通信功能的设备,获取GPS定位信息并对其进行存储;对船舶运行状态信息进行实时采集、存储;把GPS定位信息、船舶运行状态信息等以无线方式实时传送给监控中心。监控平台是具有船舶定位监控、海图显示等基本功能的应用系统中心,实时接收来自船舶动态数据采集模块的数据;在电子地图上显示船舶运行轨迹;建立数据库管理和存储移动终端发送的信息,能重现选定终端的运行轨迹。VMS的系统结构见图1。
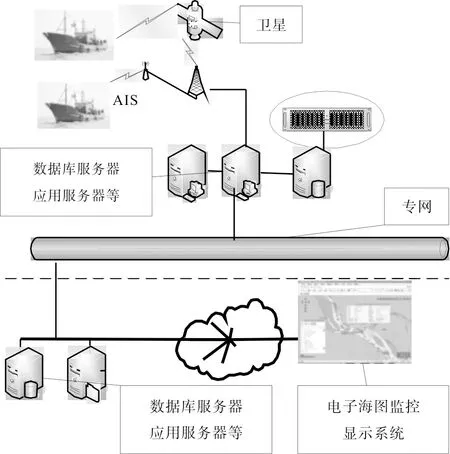
图1 VMS的系统结构Fig.1 System structure of VMS
1.2 数据来源
1.2.1 船舶定位终端 船舶定位系统的数据来源于船载终端的报位数据,主要有:国际通用的AIS设备;国内管理部门安装北斗卫星终端、海事卫星终端等具有定位、报位的终端。
AIS是船舶自动识别系统的简称,配合全球定位系统(GPS)将船位、船速、改变航向率及航向等船舶动态结合船名、呼号、吃水及危险货物等船舶静态资料由甚高频(Very High Frequency,VHF)频道向附近水域船舶及岸台广播,使邻近船舶及岸台能及时掌握附近海面所有船舶之动静态资讯,采取必要避让行动,对船舶安全有很大帮助。AIS利用VHF的161.975和162.025MHz两个频段进行发射信号和接收信号。AIS设备为国际海事组织要求安装,国际海事组织规定所有300t及以上的国际航行船舶,和500t及以上的非国际航行船舶,以及所有客船,要求配备一台AIS。其余定位终端为国内管理部门要求安装,目前已经安装在全国各地185马力以上的所有渔船、部分商船。图2所示为一种船载AIS终端。

图2 船载AIS终端Fig.2 Ship AIS terminal
本系统的AIS数据通过部署于沿海基站接收到的沿海30~60海里范围内的船舶AIS广播,通过运营商的线路,基站将原始数据存入数据中心。
中国的北斗卫星导航系统可在服务区域内随时确定用户所在的地理经纬度信息,并提供双向短报文通信和精密授时服务,可成功解决偏远地区数据通信的难题。北斗卫星导航系统将定位与通信功能相结合的特点,尤其适用于船舶的远洋航行监控[7-8]。
国际海事卫星通信系统(INMARSAT)是移动业务卫星通信系统的一种。船载海事终端采用INMARSAT-C系统是一种低速率、双向全球卫星移动数据通信的系统,其通信速率为1 200 bit/s,其主要的业务包括存储转发报文、遇险呼叫、增强型组呼、数据报告和询呼[9]。船载海事卫星终端实现了定位和通信功能,非常适用于船舶的大范围动态监控[10]。
本系统的船舶北斗数据来源于北斗卫星运营商,船舶海事卫星来源于中国交通通信信息中心,系统平台通过接口方式双向访问北斗卫星数据、海事卫星数据,北斗卫星覆盖范围为亚太地区,海事卫星数据的覆盖范围为全球。
2 系统设计
2.1 系统总体架构设计
本系统采用分层结构,总体架构见图3,总体构架共分为:网络层、数据资源层、应用支撑层、应用层4个层面。

图3 系统总体构架图Fig.3 Overall framework of system
(1)网络层:网络层是本系统所依托的、最基本的信息系统的物理支撑平台,包括局域网、互联网和卫星网络。网络拓扑见图4。

图4 网络拓扑图Fig.4 Network topology
(2)数据资源层:数据资源层包括经过本系统信息资源规划后统一支撑各类应用服务的数据库群。
双向传输数据 在客户端对安装有海事卫星C站、北斗、CDMA/GPRS、短波、超短波、RFID的移动目标进行主动调取数据、发送信息等操作。
单向传输数据(客户端到数据中心) 对仅安装AIS设备的移动目标只能被动接收数据,进行显示、统计。
(3)应用支撑层:应用支撑层包括AIS监控系统平台与通信服务平台。
(4)应用层:应用层主要包括船舶监控系统、台风等信息展示。
2.2 系统结构
2.2.1 子系统划分 本系统子系统划分为表1所示,分为船载子系统、通信子系统、VMS子系统、信息管理子系统、监控子系统、数据库子系统。

表1 子系统划分表
2.2.2 平台主要功能 平台主要功能其主要功能包括:船位监控、短消息通信、紧急报警、区域越界报警、进出港智能管理、渔船分组管理、轨迹回放、电子海图操作、信息发布、信息查询、统计,船舶档案管理、系统管理等。
2.2.3 子系统功能描述 系统功能需求和子系统之间的对应关系以及各子系统的程序模块的功能分配见表2。

表2 子系统功能对照表
2.3 数据库设计
2.3.1 数据库设计 本系统选用Oracle数据库,版本为11g。
系统数据库分为系统管理表和船舶动态数据库表,系统管理数据库主要为系统用户表、用户权限表、通信服务商管理表;船舶动态数据库表主要由船舶历史位置信息和最后一次船位表组成,船舶动态数据库表描述见表3:

表3 动态数据库表描述
2.3.2 数据库容量估算 船舶定位数据是海量的数据,以浙江省AIS数据为例:20个AIS接收基站:单站单信道2min 4 500时隙,由于传输的数据是自定义标准数据结构,每包大小按照100字节计算,信道负载按照50%计算。单个AIS基站每秒数据=4 500/2×2×0.5×100/60=3 750字节;单个AIS基站每天数据=4 500/2×2×0.5×100×60×24=324 000 000字节=309 MB;单个AIS基站每月数据=单站每天数据×30=9 270 MB=9 GB。20个站的数据则每月数据是9×20=180 GB,20个站每年数据是180×12=2 160 GB。
2.3.3 海量数据查询优化
(1)AIS数据存储策略:本文以记录行数最大的AIS定位数据相关表。AIS分为动态信息和静态信息,动态信息分为:AIS动态消息表包含轨迹ID、MAC、GPS时间、接收时间、经度、纬度、船艏向、速度、状态、消息、类型、高度、消息ID字段,本系统为减少数据库容量、增加查询速度,经纬度转换为数字型,时间采用UTC时间:
(2)经纬度计算方式:平台显示的经纬度格式如下:度数+分数(带小数点),转换方式:(度数×60+分数)×10 000,用number格式存储。如:29°44.941′N,换算(29×60+44.941)×10 000=17 849 410。
(3)时间计算方式:采用UTC时间,即自1970-01-01 T 00:00:00以来的秒数,用number格式存储。
(4)回放数据操作:平台查询最多的操作是单船轨迹查询和多船区域轨迹回放,所涉及到的操作是查询AISDYNAMICLOG和TRACKS两张表,时间跨度通常低于6h。实测AISDYNAMICLOG表存储了约2a的数据,表大小为5.9×109行,查询非常缓慢。在不可以改变表结构的前提下,本系统采用Oracle分区表保存数据,分区方式为每天一个分区,为保证系统运行的稳定、高效,最多保存24个月的历史数据。通过分区索引,对超大表或超大索引的SQL查询和DML无需进行任何修改即可访问这些分区表和分区索引。定义了分区后,DDL语句就只访问和操纵单个分区,而不是整个表或索引,显著缩短操作处理时间,能显著缩短的原因是这些操作仅限于分区级(在个体的分区上),而非表级(在整个表上),通常的查询只需要访问分区的一个子集即可完成,从而避免了访问整个表,极大提高查询响应性能。
(5)查询速度测试:在相同硬件配置条件下,通过测试数据库,先测试未建立分区表的查询速度,再对数据库建立分区表,实测通过监控平台查询6h约10 000平方海里的所有船的轨迹(见图5)。
建立分区的情况下,平均时间为8.51s,未建立分区的情况下,平均时间为28.54 s。测试结果如图6。

图5 区域查询测试Fig.5 Range query test

图6 区域查询测试结果Fig.6 Test result of range query
3 多源数据的处理
3.1 平台数据来源
本系统所采用的数据来源于船载终端的报位数据。该数据分为两类:AIS数据,这类数据遵循国际标准,因此可以接收到任何国籍的船舶的AIS数据;其他定位数据,指国内的管理部门安装在船舶上的终端所发送的定位数据,这类数据仅相关管理部门有权限访问。
3.1.1 AIS数据 本系统将AIS数据分为系统外AIS数据(主要是经过基站覆盖海域的商船)和系统内AIS数据(管理部门安装的),AIS是采用国际通用标准方式传输,因此两类数据都可以接收,AIS数据采用IEC61161[1]通用格式单向传输,即:只能从基站到数据中心。AIS数据包含静态数据和动态数据,静态数据包含:船名、呼号、MMSI、IMO、船长、船宽、船舶类型、船舶状态,吃水,目的地、ETA等;AIS动态数据包括船舶的包含经度、纬度、船艏向、航迹向、航速等。
3.1.2 其他定位数据 其他定位数据指安装了管理部门指定的终端船舶数据,主要为:北斗卫星终端数据、海事卫星终端数据、CDMA终端数据等,这些数据通过卫星、运营商网络等,存储在通信应用提供者的数据库,通信服务商提供TCP服务,系统中心以客户机方式访问通信服务商。
3.2 多源数据交换接口
终端定位数据分为静态和动态两部分,信息交换接口采用WebService方式提供统一的数据接口。
系统静态信息交换接口包含系统中心对外发布静态信息接口以及中心获取外部静态信息接口。静态静态信息交换接口适用对象为系统平台以及通信应用服务提供者。
动态信息交换接口用与接收通信应用服务发送的船舶动态信息,同时用于系统平台向船舶定位终端发送指令。动态信息交换接口采用TCP自定义协议实现数据接口。通信服务商提供服务所在IP以及端口、用户名密码等必须数据。
终端定位数据的传输方式为双向传输:通信服务商把获取到的终端静态和动态信息可以通过接口,服务端接推送给客户端的数据包含位置数据、信息数据、命令回执。
服务端向客户端推送数据后,判断客户端以同样序列号发送的回执。
服务端推送数据时,如在服务端与客户端保持连接状态下超过20 s未收到客户端发送的回执,服务端在客户端连接状态下重新发送该推送数据,最多3次。
客户端网络异常超过30 min仍未连接的数据,服务端保存30 min内的数据缓存通过WebService给客户端下载恢复数据。
对于服务端出现异常情况,服务端数据能提供WebService供客户端下载恢复数据。
3.3 多源数据定位算法
AIS终端的报位间隔与北斗卫星终端等其他终端不一致,其报位间隔[1]与船舶航行速度密切相关,报位间隔见表5。

表5 AIS报位间隔
Note: ①Speed or status;②Reporting interval of AIS ship update time;③Ship update time
船载其他终端的报位间隔服务频度的设置受到终端自身的用户等级限制(一般为5 s~10 min之间),即终端所设置的服务频度不能超过其用户等级所规定的范围,其报位间隔与船舶航行速度无关。
以北斗卫星终端为例,其报位间隔受到运营商限制,最短间隔为60 s报位一次;船载CDMA终端30 s报位一次。
由此可见,船舶在航行的一个时间段中,数据中心可以收到同一船舶的多个定位数据,采用多源数据融合的算法可以有效利用这些定位数据,从而提高系统显示船舶实时位置的准确性。
本系统采用的多源定位算法的思想如下:

新定位算法Algorithm1NewTrackAlgorithm1:INPUT:AISDYNAMICLOG,(ii)TRACKS,(iii)MMSI//AISDYNAMICLOG:船舶的AIS报位信息;TRACKS:船舶的其他终端报位信息;MMSI:船舶的水上移动通信业务标识码2:OUTPUT:NewTrack //船舶的最新位置3:forAISDYNAMICLOG.MMSI=MMSIandLASTTRACK.MMSI=MMSI //船舶的报位信息中的MMSI匹配4:ifAISDYNAMICLOG.LATITUDE<54000000andAISDYNAMICLOG.LATITUDE>-54000000andAISDYNAMICLOG.LONGITUDE<108000000andAISDYNAMICLOG.LONGITUDE<108000000then//定位数据进行筛选,剔除残缺不全的数据,LATITUDE为纬度,范围[-90°,90°],转换方式:(度数∗60+分数)∗10000,即纬度范围为[-54000000,54000000],LONGITUDE为经度,范围[0,180°],即[0,108000000°]5:updateAISDYNAMIC//∗更新该船舶最新的AIS位置信息6:ifTRACKS.LATITUDE<54000000andTRACKS.LATITUDE>-54000000andTRACKSLONGITUDE<108000000andTRACKS.LONGITUDE<108000000then//定位数据进行筛选,剔除残缺不全的数据7:updateLASTTRACK//更新该船舶最新的其他终端报位信息8:ifAISDYNAMIC.DRRCVTIME>=LASTTRACK.RECEIVE_TIME9:Newtrack=AISDYNAMIC10:Else11:Newtrack=LASTTRACK//比较最后一次报位时间,取最近的报位时间的位置信息12:endfor
算法的思想如下:
获取某一船舶最新的AIS报位信息,进行合法性校验,通过校验和筛选后,更新该船的最新AIS定位数据到AISDYNAMIC表。
获取某一船舶的其他终端最新报位信息,通过校验和筛选后,更新该船的最新定位数据到LASTTRACK表。
根据该船舶水上移动通信业务标识码(MMSI),查询AISDYNAMIC表和LASTTRACK表,比较同一船舶的定位数据接收时间,从两张表中选取与上一次定位数据获取时间最相近的数据,作为该船舶最新的位置信息,更新到Newtrack表。
定位平台显示的船舶完整位置信息为船舶基本信息加上最新的位置信息,其中船舶基本信息来源于管理部门的船舶资料数据库,船舶的最新的位置信息为Newtrack表。
4 标准电子海图引擎
船舶监控平台的海图部分采用了国际标准电子海图引擎,引擎主要功能包括电子海图数据导入,海图浏览(包括放大、缩小,鼠标滚轮操作、拉框放大),海图显示控制(基本、标准、全部和自定义图层显示,白天、夜间、黄昏3种模式)和海图数据拾取。
4.1 电子海图引擎技术简介
本系统的电子海图引擎通过开发符合国际标准(S-57数据交换标准和S-52海图显示标准)[11]的电子海图引擎,为监控平台提供统一的海图服务。标准电子海图实例见图7。
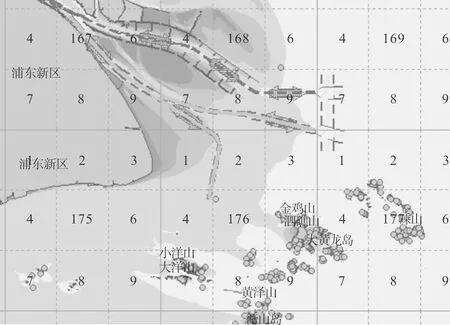
图7 标准电子海图Fig.7 Standard electronic chart
海图引擎共分4个模块:标准S-57海图读取和转换、按照S-52标准显示海图、海图浏览和信息显示控制以及海图引擎封装。
标准S-57海图读取和转换模块实现将标准ENC数据转换为SENC数据,以方便海图数据快速读取、检索和更新。海图读取和转换完毕,将根据IHO S-52标准和显示库定义的各类不同物标的显示规则对视口内的物标进行渲染。由于显示库定义的规则为文本规则,需要对每条规则进行数字化并组织优化。每次渲染,从海图文件中提取一条记录,匹配显示规则,根据匹配规则的内容,决定不同物标在当前比例尺下是否绘制,以及如果绘制其绘制的颜色、图符标志、文本信息内容等。
经测试,本系统的电子海图引擎每百次操作平均响应时间:<2s;ENC到SENC数据转换无损失;显示符合S-52标准。海图管理见图8。

图8 海图管理Fig.8 Electric chart management
5 系统实例
本系统在应急救援、事故调查、防台避灾等方面发挥了重要的作用。
(1)应急救援:渔船在航行过程中一旦遇险,可以通过北斗(海事)卫星终端一键发送求救信号,指挥中心马上可以收到求救信号,获取渔船信息、遇险经纬度,组织救援。渔船生产海域一般远离大陆,按照现有救援船舶的航行速度,往往要几个小时才能到达出事海域,通过系统平台,指挥中心可以查询出事海域相关渔船,群发协助信息给相关海域,先行救援,救援船舶同时开赴出事海域,这样节省了宝贵的救援时间。区域搜索实例见图9。

图9 区域搜索Fig.9 Area search
(2)事故分析:海上船舶碰撞事故多发,以渔船为例,多次出现船舶失联现象,船舶失联,很可能是船舶出了事故沉没,绝大部分沉没事故是商船碰撞的结果,通过本系统平台,区域回放涉事海域的船舶轨迹,分析涉事海域通过的船舶与事故船舶碰撞的可能性,通过这种技术,多次锁定肇事船舶,通过海警、海事部门及时拦截嫌疑商船,组织调查,破获多起碰撞逃逸案件。
(3)防台避灾:每年5~10月为我国东南沿海的台风季节,台风来临时,沿海船舶需要回港避风,系统的气象灾害自动预警功能自动同步气象数据,包含台风编号、风力大小、台风眼位置、移动速度、风圈大小,以台风眼为中心,在平台上生成警戒区,在平台内生成七级风圈和十级风圈,对风圈范围内的船舶进行提示根据警戒区的经纬度范围,一旦系统内的船舶出现在警戒区,根据平台数据库中的船舶最后一次经纬度,自动匹配是否在风圈影响范围内,系统可以自动发送警报给警戒区内船舶,并同时提醒平台操作人员,操作人员可以对警戒区内的船舶进一步作出指令。
6 结语
本文提出了一种基于多源定位数据的实时船舶监控系统设计,采用通用的交换接口,充分将现有船舶多源定位数据集成,最大限度的发挥已有设备效能,并具有气象灾害自动预警功能,对于促进中国船舶监控物联网发展具有重要作用。目前已经成功应用于全国的海洋、航运交通、渔政管理主管部门,保障了海洋渔业船舶生产安全,满足了主管部门在综合管理、应急救援和防台救灾的需要,并有效提高政府主管部门的安全监管能力。
[1] International Maritime Organization. Commendation of Performance Standards for an Universal Shipborne Automatic Identification System ( AIS) [S]. London: IMO, 1997: 13-16.
[2] Ou Z, Zhu J. AIS database powered by GIS technology for maritime safety and security[J]. Journal of Navigation, 2008, 61(4): 655-665.
[3] 王艳军, 王晓峰. AIS和北斗终端组合在船舶动态监控中的应用[J]. 上海海事大学学报, 2011(4): 17-21.
[4] Gerritsen H, Lordan C. Integrating vessel monitoring systems (VMS) data with daily catch data from logbooks to explore the spatial distribution of catch and effort at high resolution[J]. Ices Journal of Marine Science Journal Du Conseil, 2011, 68(1): 245-252.
[5] Breen P, Vanstaen K, Clark R W E. Mapping inshore fishing activity using aerial, land, and vessel-based sighting information[J]. ICES Journal of Marine Science: Journal du Conseil, 2015, 72(2): 467-479.
[6] Lee J, South A B, Jennings S. Developing reliable, repeatable, and accessible methods to provide high-resolution estimates of fishing-effort distributions from vessel monitoring system (VMS) data[J]. Ices Journal of Marine Science Journal Du Conseil, 2010, 67(6): 1260-1271.
[7] 郭飚, 薛元宏. 北斗系统在海洋渔业信息化建设中的关键技术与实现途径[J]. 现代渔业信息, 2004(5): 13-14.
[8] 胡刚, 马昕, 范秋燕. 北斗卫星导航系统在海洋渔业上的应用[J]. 渔业现代化, 2010(1): 60-62.
[9] 石世怡. 关于Inmarsat海事卫星通信系统[J]. 广播电视信息, 2009(6): 83-85.
[10] 马冲, 左鹏, 王振华. Inmarsat系统及其在突发事件中的应用[J]. 数字通信世界, 2009(06): 31-35.
[11] International Maritime Organization. Performance Standards for Electronic Chart Display and Information System (ECDIS)[S]. London: IMO, 1994.
责任编辑 陈呈超
Design of Real Time Vessel Monitoring System Based on Multi Source Data
HUANG Hai-Guang1, 2, HU Nai-Jun3, QIU Zhi-Jin1, KONG Xiang-Lun4, GUO Zhong-Wen1
(1.College of Information Science and Engineering, Ocean University of China, Qingdao 266100, China; 2.Wenzhou Ocean and Fishery Vessel Safety Rescue Information Center, Wenzhou 325000, China, 3.Information Center, Administration for Industry and Commerce of Qingdao, Qingdao 266071, China, 4.China Transport Telcommunications&Information Center, Beijing 10010, China)
The vessel monitoring system’s interconnection is difficult due to various data sources. This paper provides a design pattern of a real-time Vessel Monitoring System(VMS) based on multi-source positioning data. The system can not collect the positioning data of all kinds of vessels by scalable interfaces, but also display real-time position by using multi-source positioning data fusion algorithm. Based on the algorithm, the system can realize the functions of playbacking navigation trace fast and communicating with different kinds of vessels. The actual practice proved that the system is effective and feasible, and it plays an important role in promoting China's development of vessel monitoring network.
VMS; AIS; electric chart; multi-source positioning data
国家自然科学基金项目(61379127;61170258);海洋公益性行业科研专项(201105034-10);温州市科技计划项目(G20100196)资助
2014-05-10;
2015-01-20
黄海广(1978-),男,高级工程师,博士生。E-mail: haiguang2000@qq.com
TP311
A
1672-5174(2015)09-122-08
10.16441/j.cnki.hdxb.20140228
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
船舶(2021年4期)2021-09-07
现代装饰(2020年8期)2020-08-24
航海(2020年4期)2020-08-17
小哥白尼(趣味科学)(2019年10期)2020-01-18
铁道通信信号(2019年9期)2019-11-25
船舶标准化工程师(2019年4期)2019-07-24
少林与太极(2018年9期)2018-09-28
航海(2017年3期)2017-06-09
中国船检(2017年3期)2017-05-18
