转差传动技术新思路
2015-03-10 06:54李俊辉
重型机械 2015年1期
雷 华,李俊辉,曾 晶,薛 松
(中国重型机械研究院股份公司, 陕西 西安 710032)
转差传动技术新思路
雷 华,李俊辉,曾 晶,薛 松
(中国重型机械研究院股份公司, 陕西 西安 710032)
根据转差传动的特点,通过对传动原理分析,提出一种通过改变输入轴驱使齿轮的转速,实现大减速比和平缓换向的转差传动技术新思路,扩展了差传动的应用范围,为传动机械提供了一个研究方向。
减速机;转差传动;传动比
0 前言
传动减速机的目的是将输入动力源的转速和力矩经过减速机的传动系统后,按设定要求进行放大或缩小,实现力和转速的传递。
转差传动技术是根据传动基本原理,结合相对运动的齿轮转差来改变与其啮合齿轮的公转速度来实现一定传动比的一种技术。
本文从转差传动基本原理出发,经过分析,提出一种新型传动方法,通过改变输入轴旋转方向和转速,可实现转速平缓正反转切换,且能增大减速机的总传动比范围。
1 原理分析
1.1 基本轮系
转差机构如图1所示,Z1、Z3分别与Z2啮合。如果Z1或Z3之一固定,轮系就是传统上的行星轮系。

图1 转差机构轮系Fig.1 Gear train of differential transmission
如果Z1和Z3的旋转方向相同,在转速相等的情况下,Z2自身相对其旋转轴静止,不发生旋转,只有齿轮Z2围绕其齿轮架输出轴以n4速度旋转,在Z1的转速大于Z3时,Z2自身相对其旋转轴旋转,随着Z1与Z3速度差的增大而增大,齿轮Z2围绕其齿轮架输出轴以n4速度也相应增大。
如果Z1和Z3的旋转方向相反,在转速相等的情况下,Z2自身相对其旋转轴原地旋转,齿轮Z2的齿轮架输出速度n4为0,在Z1的转速与Z3的转速不相等时,Z2自身相对其旋转轴旋转同时,齿轮Z2的齿轮架输出轴n4沿Z1与Z3中速度大的一方旋转方向旋转,且随着Z1与Z3速度差的增大而增大。
如果Z1的转动方向和速度不变,Z3的转速从小于Z1的转速逐渐增大,并逐步超过Z1的过程中,Z2自身相对其旋转轴的旋转方向会从一个方向逐渐过渡到反向,同时也驱使齿轮Z2的齿轮架输出轴的旋转速度n4从一个方向逐渐过渡到反向,速度也随之发生变化。
1.2 输出转速与输入转速间的关系
在图1中,由于两个Z1、Z3齿轮同时与Z2啮合,它们具有相同的模数m,假设Z1齿轮的齿数为NZ1,Z2齿轮的齿数为NZ2,Z3齿轮的齿数为NZ3,Z1的转速为n1,Z3的转速为n3,那么Z2相对Z1来说,其转速n2与Z1、Z2、Z3的转速有关,是这两个齿轮驱使齿轮Z2旋转的转速之和。
如图2所示。Z1旋转时驱使Z2旋转的转速n21为
n21=NZ1NZ2n1
式中,NZ1为齿轮Z1的齿数;NZ2为齿轮Z2的齿轮数。
Z3旋转时驱使Z2旋转的转速n23为
n23=NZ3NZ2n3
式中,NZ3为齿轮Z3的齿数。
所以,Z2相对其旋转轴的转速为
n2=n23-n21=1NZ2(NZ3·n3-NZ1·n1)
(1)

图2 机构相关转速的空间关系Fig.2 Space relationship of mechanism rotational speed
Z2齿轮在绕自身旋转轴旋转的同时,其齿轮架带着Z2齿轮绕旋转轴也在旋转,这一转速也就是输出转速n4。
如图3所示,在Z2和Z1啮合过程中,分度圆结合处的线速度相同,其线速度为
v21=π·NZ1·m·n1

图3 机构相关齿轮的切线速度间关系Fig.3 Relationship between relative gears’ tangent velocity
同样,Z2和Z3啮合过程中分度圆结合处的线速度为
v23=π·NZ3·m·n3
Z2以A点为瞬心,沿Z1滚动,所以齿轮Z2随齿轮架旋转的转速时,分布在Z3齿轮的分度圆切线方向的线速度为:
v2=v23+12(v23-v21)
=π·mNZ3·n3+(NZ3·n3-NZ1·n1)2
由此可推导出输出转速n4
v2=π2·m·NZ1·(n1+n3)
v2=π·d3·n4=π·m·NZ3·n4
则
n4=NZ12NZ3(n1+n3)
(2)
当轮系确定后,NZ1、NZ3也确定不变,改变n1、n3或其中之一,就可改变轮系的输出速度n4的大小和方向。利用这一特点可对图1所示的转差传动机构进行扩展应用。
2 转差机构拓展应用举例
2.1 单输入方式的新型转差机构
如果单输入方式的新型转差机构的轮系如图4所示,NZ1=NZ1′,NZ4>NZ3,NZ5>NZ6,那么
n3=-NZ3·NZ6NZ4·NZ5n0
n1=NZ6NZ5n0
式中,NZ4、NZ5、NZ6分别为齿轮Z4、Z5、Z6的齿数。


图4 单输入方式的新型转差机构Fig.4 Single-input differential mechanism
此轮系的传动比为
i=n0n4=2NZ5·NZ4NZ6(NZ4-NZ3)
Z4和Z3的齿数越接近,轮系的传动比就越大。这种轮系相对行星减速机来说,简单而传动比大,具有很好的经济实用性。
3.2 双输入方式的新型转差机构
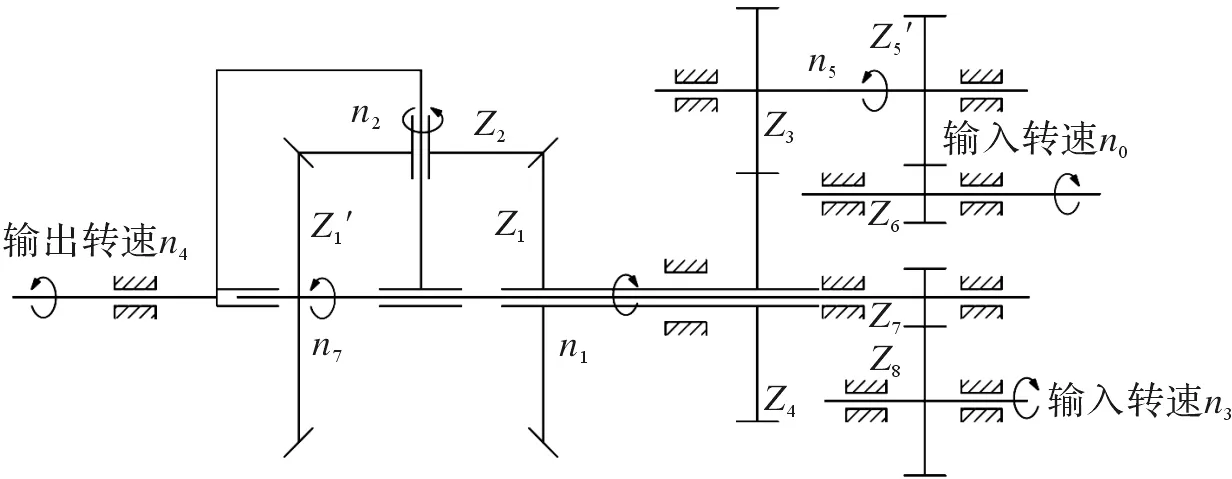
图5 双输入新型转差机构Fig.5 Dual-input differential mechanism gears

图6 双输入新型转差机构的齿轮啮合关系Fig.6 Relationship between dual-input differential mechanism gears

n1=NZ3·NZ6NZ4·NZ5′n0
n7=-NZ8NZ7n3
所以,输出轴上的转速n4为

该轮系的传动比与n0、n3的变化有关、随着n0、n3的变化,n4可能为正,也可能为负,也可能为0。大大增加了轮系传动比范围。此轮系的传动比不再唯一依靠轮系各齿轮关系确定,而可经过两个输入转速之一的调节而调节,大大提高了传统齿轮传动机构的调速范围。输出转速在输入转速方向不发生改变的情况下,可实现换向功能,且无冲击平滑过渡。这是此轮系独有的特点。
3 结论

[1] 安子军.机械原理[M].北京:机械工业出版社,1998.
[2] 成大先.机械设计手册[M].北京.化学工业出版社,1993.
[3] 孟宪源.现代机构手册[M].北京:机械工业出版社,1994.
[4] 张启先.空间机构的分析与综合[M].北京:机械工业出版社,1987.
[5] 郭芝俊等.机械设计便览[M].天津:天津科学技术出版社,1988.
[6] 卜炎.机械传动装置设计手册[M].北京:机械工业出版社,1978.
[7] 齿轮手册编委会.齿轮手册[M].北京:机械工业出版社,2001.
[8] 成大先.机械设计手册.第四版[M].北京:化学工业出版社,2001.
[9] 梁桂明.锥齿轮强度计算的统一[J].机械制造1988,(10).
[10]吴序堂.齿轮啮合原理[M].北京:机械工业出版社,1982.
[11]蔡春源.新编机械设计手册[M].沈阳:辽宁科学技术出版社,1993.
[12]杨延栋.渐开线齿轮行星传动[M].成都:成都科技大学出版社,1986.
[13]张展.实用机械传动设计手册[M].北京:科学出版社,1994.
[14]冯澄宙.渐开线少齿行星传动[M].北京:人民教育出版社,1982.
[15]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2005.
A new idea of differential mechanism
LEI Hua, LI Jun-hui, ZENG Jing, XUE Song
(China National Heavy Machine Research Institute Co., Ltd., Xi’an 710032,China)
According to the character istics of differential transmission and analysis of the transmission principle a new kind of differential mechanism is proposed by changing the driving gear speed of the output shaft, achieving a large redu ction ratio and a smooth reverse direction capalbility. This idea expands the scope of application of differential transmission and provides a research direction for transmission machinery.
reducer; differential mechanism; radio
2014-10-11;
2014-12-05
雷华(1972-),男,中国重型机械研究院股份公司,高级工程师。
TH131
A
1001-196X(2015)01-0024-05
猜你喜欢
制造技术与机床(2022年10期)2022-10-11
经纬天地(2022年3期)2022-07-20
舰船科学技术(2021年5期)2021-07-03
小学生学习指导(高年级)(2021年3期)2021-04-06
中国金属通报(2020年23期)2020-03-15
制造技术与机床(2019年12期)2020-01-06
制造技术与机床(2019年9期)2019-09-10
制造技术与机床(2017年7期)2018-01-19
汽车实用技术(2017年15期)2017-09-15
制造技术与机床(2017年2期)2017-05-04