模糊控制在液压闭环同步系统中的应用研究
2015-03-06 01:32黎良思黄义萍王志翔
电子科技 2015年11期
黎良思,黄义萍,王志翔
(上海理工大学 光电信息与计算机工程学院,上海 200093)
电液比例控制是目前应用较多,精度较高的液压控制系统。液压多缸同步应用场合广泛,但多缸同步控制系统本身具有非线性和不确定性,液压工况变化复杂,传统的控制方法,如PID 已无法满足实际液压系统的控制精度要求,自适应能力差、抗干扰能力弱,复杂工况的情况下主要依据操作人员的经验知识进行调控,传统的控制方法具有局限性。
模糊控制理论不依赖于受控对象的精确模型而被广泛用于到了工业生产中,模糊控制具有较强的鲁棒性,能够实现在线参数校正,自适应能力强[1]。本文针对提高液压多缸同步的精度,提出了基于模糊控制理论的双缸液压闭环同步控制方法。结合液压电液比例阀控制系统的数学模型,通过Matlab 建立模糊控制模型进行仿真,仿真结果说明基于模糊算法的主从控制方式能够提高液压多缸同步控制系统的准确性、抗干扰性和自适应能力。
1 电液比例控制系统数学模型
电液比例控制系统由控制器、电液比例阀、液压油缸和位移传感器等组成,如图1 所示,控制器发出控制指令,经比例放大器放大后的电压信号作用于比例阀的电磁铁,电磁铁得电后阀芯产生相应位移控制阀口开度,进而控制流入液压油缸的液压油流量,使液压油缸在产生相应的位移,位移传感器将采集的数值与设定值进行比较,根据误差来调整控制器给定的参数,通过闭环控制以提高位移控制的精度[2]。液压电液比例控制系统框图如图1 所示。
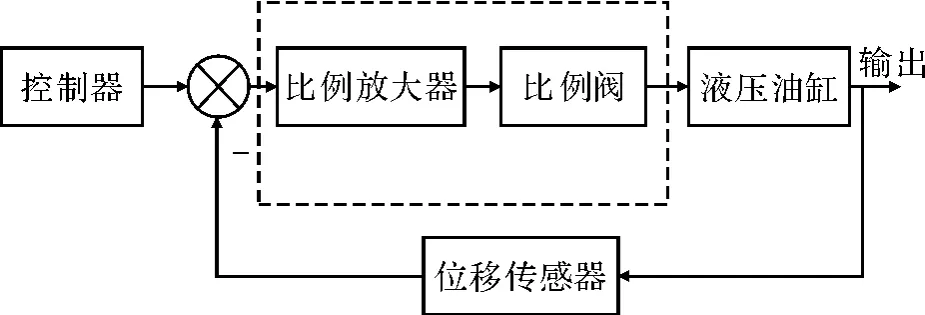
图1 液压电液比例控制系统框图
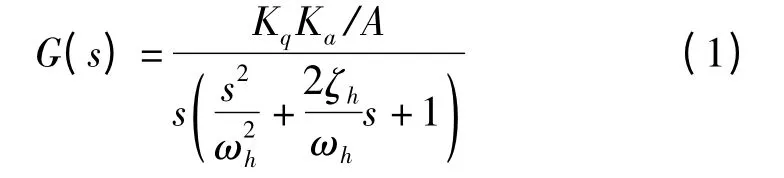
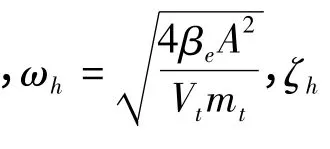
液压电液比例控制系统主要元件包括电液比例阀和液压油缸,系统的数学模型取决于阀和油缸的动态特性,考虑到电液比例阀的频率远高于液压油缸的固有频率[3],此处将阀看作比例环节,比例系数为Ka,位移传感器在本系统中也是视为比例环节,比例系数为Ky。控制器输入为电压U,输出为液压缸的位移y,则以电压U 为输入,液压缸活塞位移y 为输出,电液比例阀控缸动力机构的传递函数为[4]
2 液压多缸同步控制策略
多液压缸的同步控制多采用闭环同步回路,传感器将釆集到的液压油缸输出信号作为反馈信号,通过对电液比例阀进行控制,调节各支路的输出流量,从而实现多液压缸同步运动。经典液压同步控制方法主要是由Robert.D.Lorenz 和Y.Koren 提出并发展起来的,多液压缸同步控制方法主要由如下几种方式[6]:
(1)并行控制方式。并行控制也称作同等控制,是指对两个或多个执行液压缸采用独立的反馈通道对同一设定值进行追踪调整,也可共用一套反馈通道分别对设定值进行反馈调整。通过对各自通道输出参数的检测和反馈,由各自控制器调节与输入给定值的误差以达到同步输出,并行控制方式原理如图2所示。
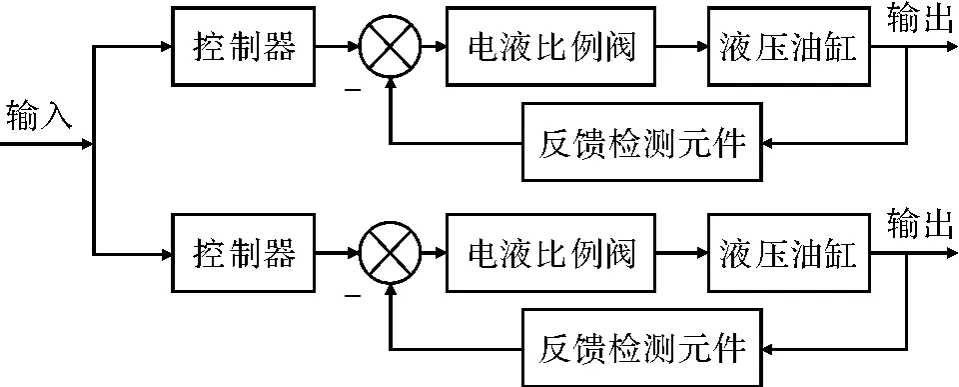
图2 并行控制方式原理图
(2)主从控制方式。主从同步控制是指对于多个需要同步控制的液压油缸,以其中一个液压缸作为参考基准,其余液压缸通过控制器的控制来跟随基准液压缸运动,从而实现多个液压缸的同步运动,主从同步控制方法原理如图3 所示。
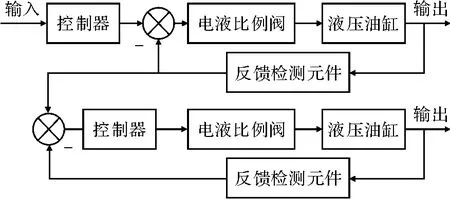
图3 主从控制方式原理图
3 主从双缸闭环同步模糊控制器设计
美国控制专家查得(L.A.Zadeh)于1965 年创立了模糊控制集合理论,为解决模糊性问题提供数学工具。1974 年,E.H.Mamdani 把模糊语言逻辑用于控制并获成功,模糊控制理论主要模仿人的控制经验,体现了智能自动化发展的方向[1]。
双液压油缸同步驱动负载具有非线性、不确定性,本文采用模糊规则对从动液压油缸的电液比例阀的输入电压U 进行在线整定,从而使液压流量基本相同,而实现双油缸输出位移同步。模糊控制器采用二维输入一维输出,其原理为通过位移传感器采集的从动液压油缸与基准液压油缸输出位移值之间的偏差e 和位移偏差率ec 作为控制器的输入,从动油缸的电液比例阀输入电压U 作为输入[7]。双油缸主从同步模糊控制器的系统框图如图4 所示。
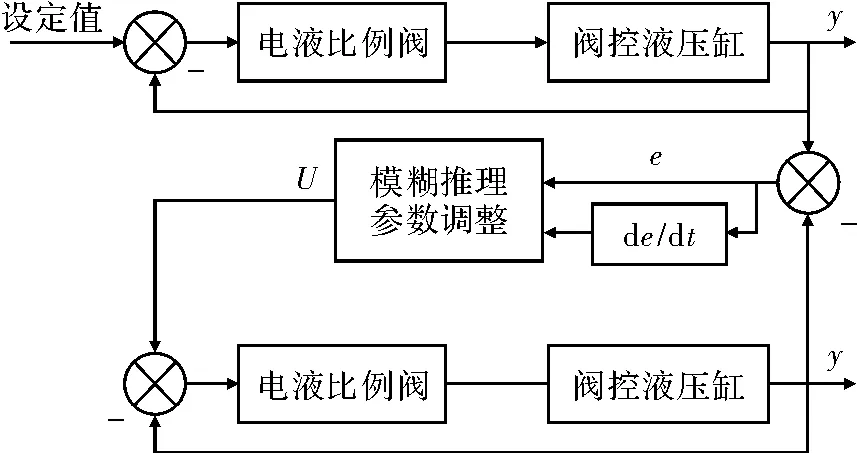
图4 双油缸主从同步模糊控制器系统框图
模糊控制器选用正大、正中、正小、零、负小、负中、负大7 个语言变量,则输入e 的模糊子集为{PB,PM,PS,ZO,NB,NM,NS},输入ec 的模糊子集为{PB,PM,PS,ZO,NB,NM,NS},输出为电压U,其模糊子集为{PB,PM,PS,ZO,NB,NM,NS}。考虑到油缸位移的实际情况,选择偏差e 的模糊论域为[-3,3],量化因子Ke=0.2,偏差变化率的模糊论域为[-3,3],量化因子为Kec=5,输出电压U 的模糊论域均为[-6,6],比例因子Ku=2.5。本文中输入量e 和ec 采用Gaussmf函数(高斯型)隶属函数,输出量电压U 采用Trimf 函数(三角形)隶属函数,解模糊方法选择中位数法[8]。
模糊控制器的参数调整部分是找出两油缸输入位移偏差e 和偏差变化率ec 与输出电压U 的模糊关系。文中选取输出量的原则为:当出现位移偏差e 大或较大时,选择控制量以快速消除偏差e 为主要目标;而当位移偏差e 较小时,选择控制量防止系统出现超调,以保证系统的稳定性为优先[3],根据液压系统操作人员的操作经验和控制要求建立输出电压U 的模糊控制规则表[9],如表1 所示。
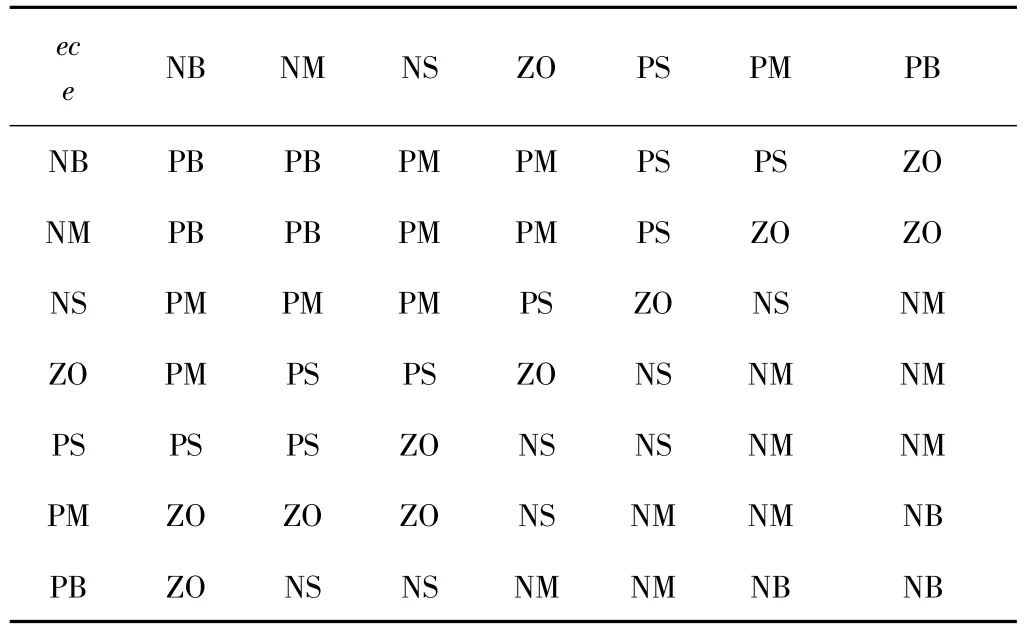
表1 电压U 模糊控制规则
模糊控制器是建立在模糊推理基础上的一种非线性控制策略,当系统负载参数变化较大时或受到非线性因素影响时,也能取得较好的控制效果。
4 仿真结果及分析

运用Matlab/Simulink 分别建立双缸闭环同步并行控制方式和模糊算法主从控制方式的仿真模型,如图5 ~图6 所示。其中,0 s 时给定阶跃信号值为1,添加了PID 模块以减小系统的超调量和达到稳态的时间以取得较好的仿真效果[10],添加随机噪声信号用于模拟液压油缸在现场负载随机多变化的情况。
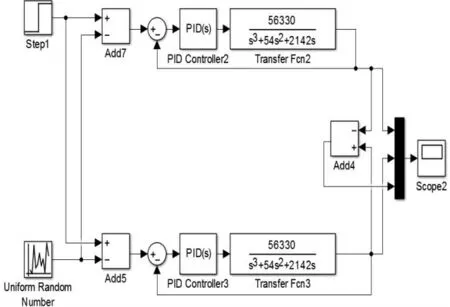
图5 并行控制方式仿真图
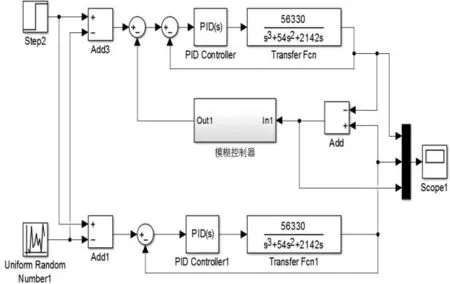
图6 主从控制方式仿真图
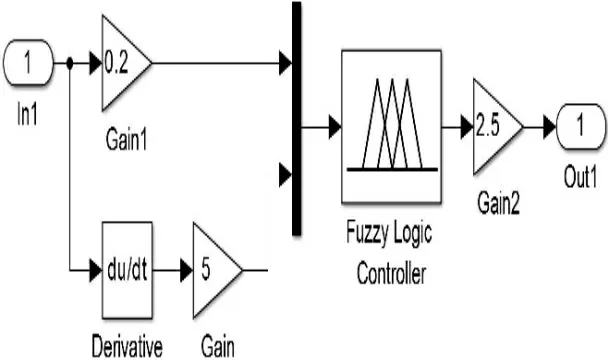
图7 解封装的模糊控制器
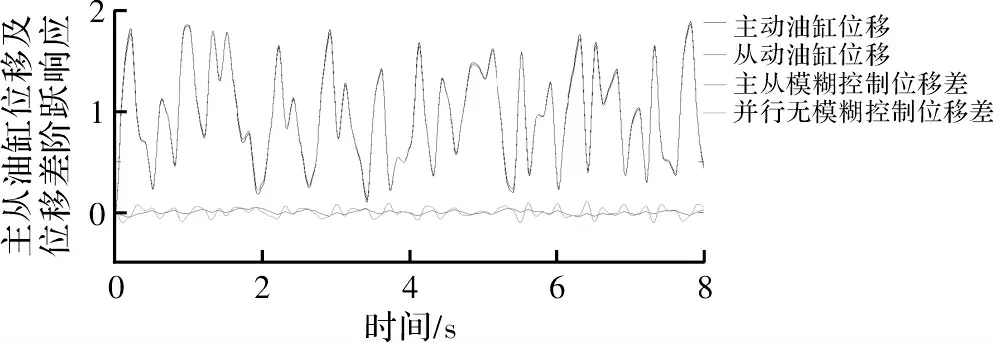
图8 随机噪声下并行控制方式与模糊算法主从控制方式仿真结果
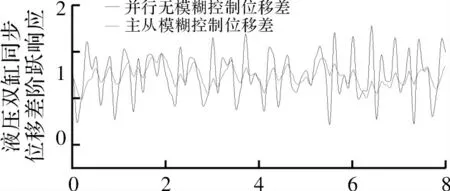
图9 随机噪声下并行控制方式与模糊算法主从控制方式位移差仿真结果
在阶跃信号和随机噪声信号的作用下,双油缸闭环同步的并行控制方式和模糊算法主从控制方式的仿真结果如图8 ~图9 所示,由图9 可看出,加入模糊控制算法的主从控制方式,两液压油缸的位移差值在[-0.05,0.05]之间波动,并行控制方式下的两油缸位移差值变化范围为[-0.1,0.1],对于随机噪声的多变化影响,加入模糊控制算法的主从控制方式下的两油缸位移差值波动幅度范围减小50%,相比并行控制方式的双缸闭环同步,具有较强的抗干扰性和自适应性。
5 结束语
本文针对液压多缸闭环同步控制的非线性、不确定性和耦合性,对比两种经典控制策略,即并行控制方式和主从控制方式,提出了主从控制方式下模糊算法在液压双缸闭环同步控制系统中的应用。依据液压电液比例控制系统的数学模型,设计了主从控制方式下液压双缸同步的模糊控制器,运用Matlab/Simulink 分别建立双缸闭环同步并行控制方式和加入模糊算法主从控制方式的仿真模型。通过在随机噪声信号干扰下进行仿真,对比双缸闭环同步并行控制方式和模糊算法主从控制方式,结果说明在液压负载变化具有非线性和不确定性的情况下,模糊控制能减小双缸位移差波动范围,提高双缸闭环同步的精度,并具有较好的抗干扰能力和一定的自适应能力,为实际工业应用提供了参考。
[1] 汤兵勇,王文杰,路林吉.模糊控制理论与应用技术[M].北京:清华大学出版社,2002.
[2] 起学梅.非对称液压缸模糊自适应PID 控制的研究[J].中国西部科技,2015,14(1):57-58.
[3] 方桂花,常福.模糊控制在线控液压转向系统上的应用[J].机械设计与制造,2015(1):141-142.
[4] 李敏捷.基于PID 算法的电液比例同步控制系统的研究与应用[D].重庆:重庆大学,2014.
[5] 宋志安,曹连民,黄靖.Matlab/Simulink 与液压系统仿真[M].北京:国防工业出版社,2012.
[6] 刘永胜.液压系统流量比例分配技术研究[D].昆明:昆明理工大学,2012.
[7] 吴会敏,刘艺柱.基于模糊自适应PID 控制的中央空调监控系统研究[J].工业仪表与自动化装置,2014(1):69-71.
[8] 朱雅光,金波,李伟.基于自适应-模糊控制的六足机器人单腿柔顺控制[J].浙江大学学报,2014,48(8):1423-1424.
[9] 窦艳艳,钱蕾,冯金龙.基于Matlab 的模糊PID 控制系统设计及仿真[J].电子科技,2015,28(2):119-120.
[10]宗超凡.基于双控制器切换的模糊PID 励磁控制的仿真研究[J].电气传动自动化,2015,37(1):27-28.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
制造技术与机床(2017年6期)2018-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
电测与仪表(2016年24期)2016-04-12
通信电源技术(2016年5期)2016-03-22
专用汽车(2016年4期)2016-03-01
西北工业大学学报(2015年1期)2016-01-19