四旋翼飞行器悬停算法设计与实现
2015-03-06 01:32邓博文龚国辉
电子科技 2015年11期
邓博文,窦 强,龚国辉,邓 林
(国防科技大学 计算机学院,湖南 长沙 410073)
四旋翼飞行器与常规飞行器相比,具有机动性高、控制灵活、可垂直起降、自由悬停等特点,近年来成为航空领域的研究热点。早些年,国际上已有诸多科学机构致力于四旋翼飞行器控制技术的研究,并取得良好的成果,具体代表有Draganflyer 公司、宾夕法尼亚大学的HMX4 实验室等。而国内在这方面起步相对较晚[1]。
悬停功能作为四旋翼飞行器独特的动力特性之一,一直是研究的热点及难点。本文通过分析四旋翼飞行器的受力,建立了其在悬停状态下的动力学模型,针对飞行器易受干扰和灵敏度高的特点利用经典PID算法设计了位置控制回路。在Matlab/Simulink 平台上,对模型的悬停模式进行控制仿真,并做了大量现场飞行测试,测试效果良好。
1 数学建模
在对无人机飞行姿态进行控制之前,建立一个合理、准确的数学模型是必不可少的。该模型具有如下约束条件[2]:(1)地面坐标系为惯性坐标系,地球表面视为平面。(2)飞行器为刚体并且质量分布均匀,重心位于机身中央。
人们已习惯将地面坐标系作为衡量物体运动的标准,而飞行器受力分析大多是在其自身坐标系中讨论,因此必须建立机体坐标系与地面坐标系的转换关系,将飞行器的状态转换到地面坐标系中进行分析。如图1所示,建立机体坐标系B(oxyz)及地面坐标系A(OXYZ)。

图1 地面坐标系A 与机体坐标系B
1.1 转换矩阵
坐标系B 到A 之间的变换矩阵R 可写为如下形式[3]
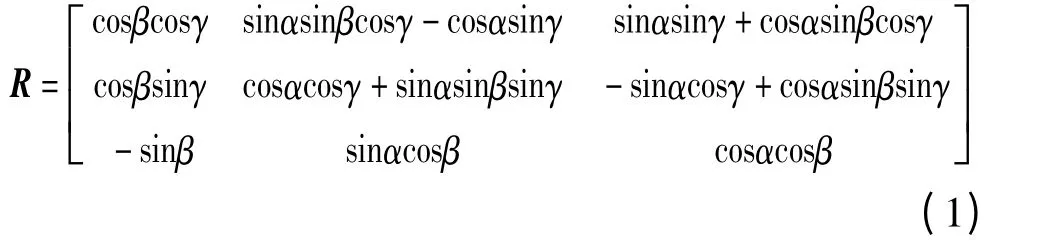
其中,α,β,γ 分别是飞行器在地面坐标系A 中沿OX(俯仰),OY(横滚),OZ 轴(偏航)旋转的角度。
1.2 外力平衡方程
在机体坐标系B 中,单个螺旋桨的升力T 和水平转矩τ 与转速存在如下关系[4]

式中,KM为旋翼升力系数;Kτ为旋翼反扭矩系数;ω为旋翼转速。
在机体坐标系B 中,飞行器的升力方向永远竖直向上,结合式(2),文中将其升力写为

根据转换矩阵R,将飞行器在地面坐标系A 中的升力写成


1.3 外力矩平衡方程

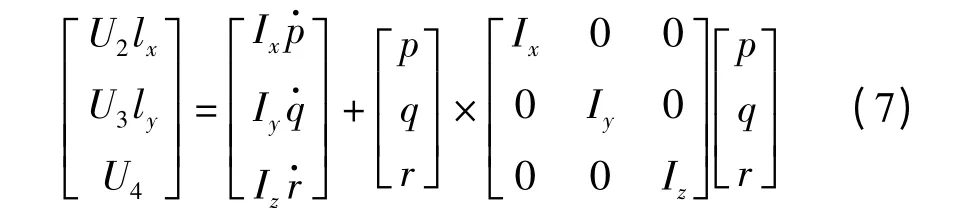
式(8)中,U2=T1+T4-T2-T3,U3=T1+T2-T3-T4,U4=τ1+τ3-τ2-τ4,lx,ly为飞行器绕x,y 轴旋转的力臂长度。根据飞行器结构的对称性,L 为飞行器单个动力轴轴长。
机体坐标系下的角速度[p q r]T与地面坐标系下的角速度[之间有如下关系[6]

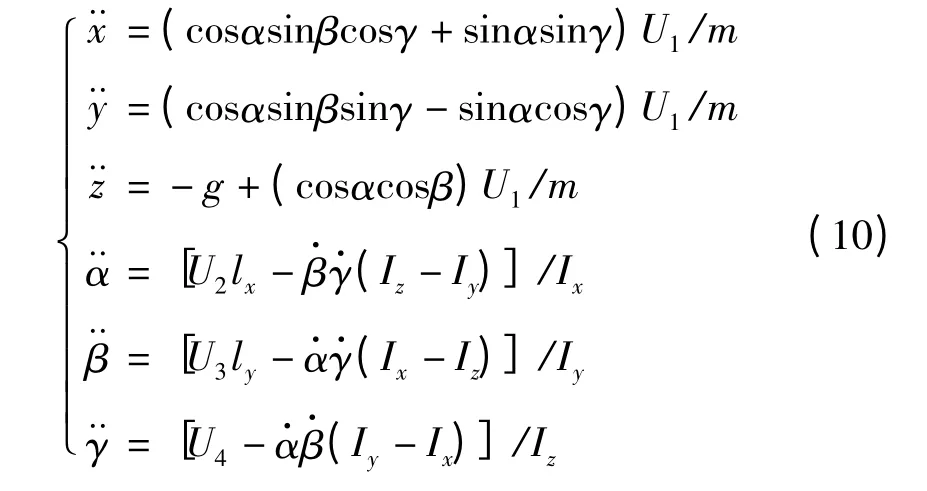
由于当角度足够小时,正弦函数趋近与0,余弦函数趋近于1,因此将式(8)简化,可近似地将认为

将式(9)的结论代入式(7),再结合式(5),得到四旋翼飞行器最终的运动学方程
2 控制器设计及仿真
2.1 控制过程
本文针对四旋翼飞行器的特殊动力学结构,分别将姿态、高度和水平位置分开来控制。
如图2 所示,本文将期望得到的坐标值(Ex,Ey,Ez)分别输入到不同的运算单元,计算出期望得到的三轴加速度与姿态角,输入动力单元后分别计算出各个电机的控制量,最后输出飞行器模型,达到控制器飞行状态的目的。

图2 总体控制框架
2.2 PID 控制器
与其他控制方法相比,PID 控制具有结构简单、易于实现、稳定性好等特点。其控制器通过调节比例(P)、积分(I)、微分(D)系数可在满足系统稳定性的前提下达到快速、精确的控制效果[7-9]。鉴于PID 控制和跟踪控制方式的优势,选用PID 控制器可以有效地对悬停这一过程进行控制。

图3 PID 控制器结构
针对图2 中的水平控制器模块和高度控制模块,利用图3 所示结构,通过目标位置与当前位置作差再进行PID 运算[10],得到3 个运动方向的期望加速度,具体操作如下

式中,(xd,yd,zd)是目标位置的三维坐标;(x,y,z)是当前位置的三维坐标。
2.3 仿真
本文重点是悬停功能的实现,而飞行器只能通过改变姿态角来产生水平方向的加速度。因此,这里重点取姿态控制模块进行分析。
图5 ~图7 分别是俯仰、横滚、偏航的仿真图,实线为期望值,虚线为实际值。当给定输入俯仰和横滚期望角度时(5°),可看出实际偏转角度存在小幅抖动。但当滚转角和俯仰角趋于稳定时,偏航角迅速收敛回到原点,输出波形的跟随性较好。因此,基于简化模型设计的PID 控制器能够达到较为满意的结果。
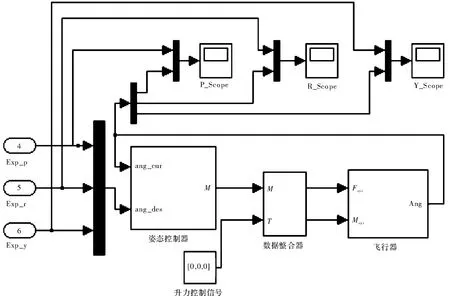
图4 Simulink 中建立的姿态控制模块
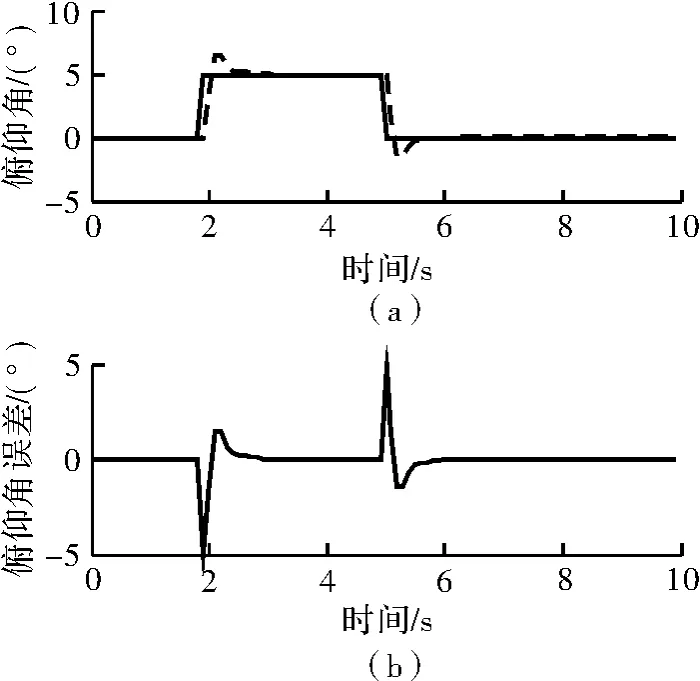
图5 俯仰角仿真波形

图6 横滚角仿真波形
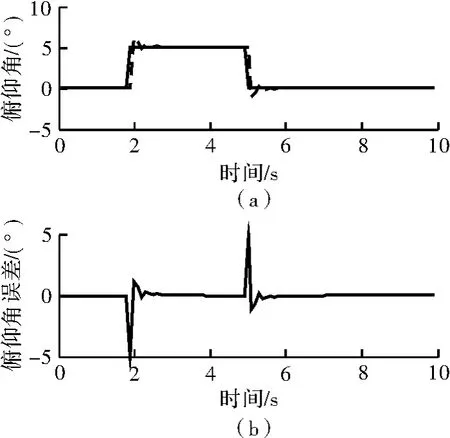
图7 偏航角仿真波形
3 现场飞行测试与结果分析
测试采用机型为轴长0.204 m,中心对称的X 型机架。整机重量为1.34 kg,绕x,y,z 三轴的转动惯量IxIyIz分别为1.968×10-3N·m·s2,1.968×10-3N·m·s2,3.245×10-3N·m·s2。升力系数KM=3.179×10-5N·s2·rad-2,反 扭 矩 系 数 Kτ= 7.432 ×10-7N·s2·rad-2。测试采用激光测距仪记录飞行数据,每次测试时长设定为100 s,每隔1 s 记录一次飞行器数据。其中一组数据如图8 所示。

图8 高度与水平测量结果
在现场飞行过程中,当飞行器起飞至半空,开启悬停功能后,其会在约2 m 的范围内漂移。造成该现象的原因是由于GPS 的精度较低,是无法控制算法弥补的。但观察整个飞行过程,可明显看出,飞行器在漂移达到一定距离时,有明显的回向动作来纠正这一误差,使其飞行位置保持在一个有限的范围内。图8(a)中,飞行器位置落在半径2 m 圆范围内的概率分布达到91%,高度的漂移范围维持在±1 m 以内。
4 结束语
本文以四旋翼飞行器的悬停功能作为研究对象,分析四旋翼飞行器的整体受力情况,建立了近似的数学模型。利用PID 控制方法对飞行器悬停状态下的姿态进行控制,并做了大量现场飞行测试,测试结果为飞行器在水平范围±2 m、垂直范围±1 m 的空间范围内漂移,实现了悬停功能。
[1] 陈国栋,贾培发,刘艳.微型飞行器的研究与发展[J].机器人技术与应用,2006(2):34-37.
[2] 谢木生,王恒升,罗涛.捷联式惯性导航仿真研究[M].计算机仿真,2013(4):84-88.
[3] 陈龙.小型四旋翼无人机的自动控制系统设计[D].成都:电子科技大学,2014.
[4] 柴卫华,侯芸.捷联惯导系统姿态算法研究[J].现代防御技术,2001,29(4):43-45.
[5] 周衍柏.理论力学教程[M].北京:高等教育出版社,2009.
[6] 方振华.倾转四旋翼飞行器控制系统设计[D].哈尔滨:哈尔滨工业大学,2012.
[7] Karl J Astrom,Tore Hagglund.PID controllers-theory design and tuning[M].2nd Edition.New York:Instrument Society of America,1995.
[8] 李波波,贾秋玲.基于滑模控制的四旋翼飞行器控制器设计[J].电子设计工程,2013,21(16):76-78,82.
[9] 黄军友.基于PID 控制的X 模式四旋翼飞行器研究[J].电子设计工程,2014,22(2):127-129.
[10]鄢景华.自动控制原理[M].哈尔滨:哈尔滨工业大学出版社,2006.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06