
空中加油自主会合的制导与控制
2014-12-25 09:20:06袁锁中王新华郑峰婴
飞行力学 2014年1期
袁锁中,王新华,郑峰婴
(1.南京航空航天大学 自动化学院,江苏 南京210016;2.南京航空航天大学 航天学院,江苏南京210016)
0 引言
空中加油技术在现代战争中具有非常重要的作用,在减少飞机起飞/着陆次数的前提下,有效增大了受油机的航程、续航时间和有效载荷[1-2]。自动空中加油是指在人的指令、监控下,实现有人或无人驾驶飞机的加油功能的自动化。
空中加油分会合、对接、编队保持与脱离四个阶段。空中加油会合段要求受油机在保证安全性的前提下,能够自主飞行到期望的会合位置,并要求受油机的最终速度和航向与加油机的速度和航向一致。空中加油受油机与加油机的会合对接是一个三维空间内的飞机制导与控制问题。文献[3-4]研究了空中加油会合问题,给出了平面内受油机的会合制导指令,没有考虑高度通道的引导问题。文献[5]将导弹制导与自动着陆的思想用于受油机的会合制导控制,基于线性方程采用模型跟踪的方法设计了飞行控制系统。文献[6]采用改进带终端碰撞角约束的比例导引律设计方法,针对Backstepping非线性控制设计了飞行控制律,在制导律的设计中,单独设计了高度通道制导律。受油机与加油机会合的飞行过程中,要求受油机的飞行轨迹平滑,飞行状态平稳。
本文基于视线法的原理,采用比例制导方法生成受油机法向与侧向的会合制导指令。采用反馈线性化方法设计角速率控制,在此基础上,分别设计法向加速度控制、侧向加速度控制及前飞速度控制系统,并通过方向舵实现侧向的协调控制。最后基于六自由度的非线性受油机模型进行仿真验证。
1 受油机空中加油会合制导与控制系统结构
如图1所示,空中加油会合段制导与控制系统结构由制导律模块、受油机飞行控制模块、受油机与加油机动力学及相对运动关系解算模块组成。由加油机和受油机的相对位置、速度等参数,通过制导律解算出受油机法向和侧向加速度以及纵向速度的指令,再经过飞行控制,使得受油机能以合适的航迹飞行并到达指定位置等待加油。
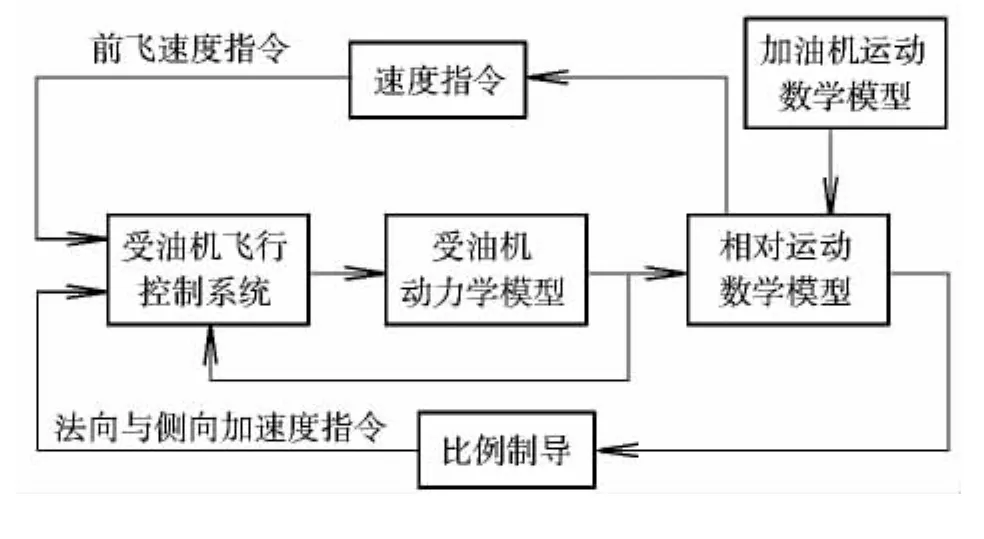
图1 自主空中加油制导与控制结构图Fig.1 Block diagram of the guidance and control of aerial refueling
2 受油机与加油机相对运动关系
图2描述了在空中加油会合过程中的加油机和受油机间的几何关系。
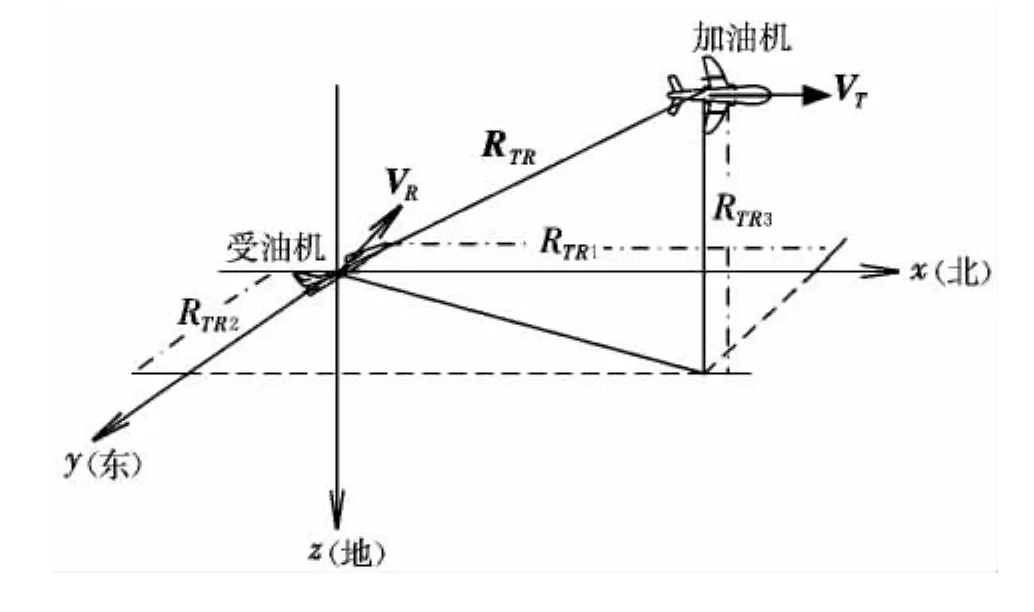
图2 空中加油时的几何关系Fig.2 Profile of the geometry in aerial refueling
受油机与加油机的接近速度为:
把受油机与加油机的连线定义为视线,在地面坐标系下的视线角速率为:
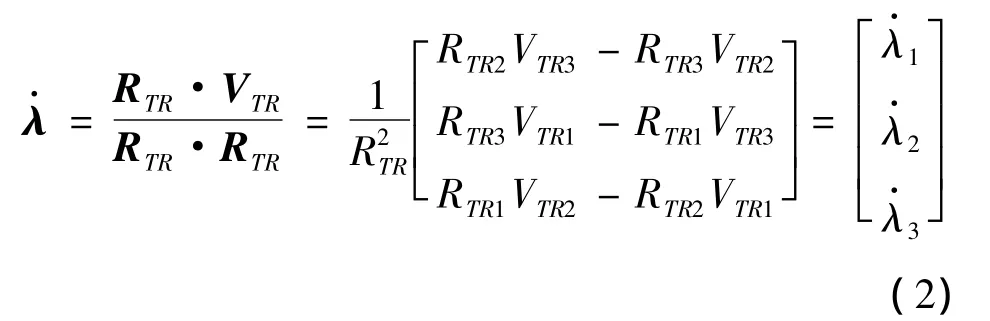
将在地面坐标系下的视线角速率转化为受油机航迹坐标系下的视线角速率:

式中,γ=θ-α为飞机纵向航迹角;χ=ψ+β为飞机的侧向航迹角。
3 自主会合制导律设计
3.1 基于比例制导的法向与横向加速度指令
受油机与加油机会合的飞行过程与导弹攻击空中目标类似,故采用比例制导的方法,可以由视线角速率得到受油机的加速度指令[7-8]。
法向加速度指令为:

横向加速度指令为:

式中,N为比例增益。上述公式已经转化为受油机机体轴的加速度指令,获得的加速度指令受到飞机能够承受的最大加速度的限制[9-10]。

式中,RTRB=[RTRB1RTRB2RTRB3]T为在受油机机体坐标系下的加油机和受油机的相对位置。

3.2 前向速度指令
空中加油会合过程中,加油机通常匀速直线飞行,受油机要先加速接近加油机。当受油机接近加油机时,受油机的速度必须减速到与加油机的速度相等,故需要精确控制受油机的飞行速度。
由于受油机的速度控制是通过改变发动机油门大小实现的,而发动机响应有延迟,导致速度响应延迟,有可能发生碰撞的危险。基于上述考虑,速度通道的加速度指令设计为:

为了保证受油机不超过加油机或者与之相撞,当距离小于某一范围时设定k大于1;否则k=1。
对式(10)的加速度指令积分,可以得到要求的前向速度指令:

4 受油机的飞行控制律设计
受油机的动力学方程为:

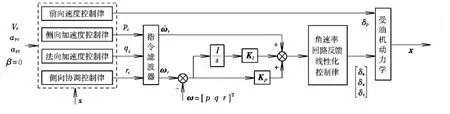
图3 受油机飞行控制结构Fig.3 Block diagram of the receiver flight control system
式中,x=[V α β p q r φ θ ψ X Y Z]T;u=[δeδaδrδp]T,δp为飞机油门开度。
受油机飞行控制结构如图3所示。首先根据飞机的角运动动力学特性比线运动动力学特性快的特点,采用时标分离,对受油机的角运动动力学采用反馈线性化的方法,实现对三轴角速率的解耦与控制。在此基础上,再分别设计受油机前飞速度、侧向加速度、法向加速度和侧向协调控制律,实现对制导回路指令的跟踪。
4.1 角速率回路控制律
考虑到飞机角运动比线运动快的特点,采用时标分离,将飞机的角运动与线运动方程分离,只考虑飞机的角运动动力学模型:

式中,ω =[p q r]T;uδ=[δeδaδr]T;xr为其他状态变量。
选取虚拟控制量:

代入式(13),可得:

对上式可设计线性控制器以跟踪角速率指令ωr。为了在阶跃输入下的稳态误差为零,采用比例积分的形式,定义:

由式(15)和式(16)构成的增广系统状态方程为:
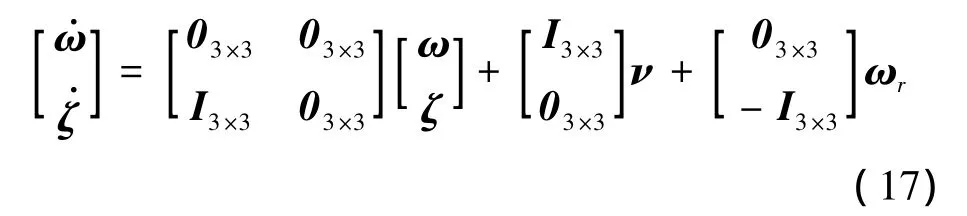

式中,[KPKI]为反馈控制阵,其中 KP,KI分别为3×3的对角阵。加入指令信号微分,加快系统的响应。定义代价函数:

选择权矩阵Q,R,通过求解Ricatti方程,可以得到相应的控制阵。最终角速率回路的控制律为:

对其采用如下控制:
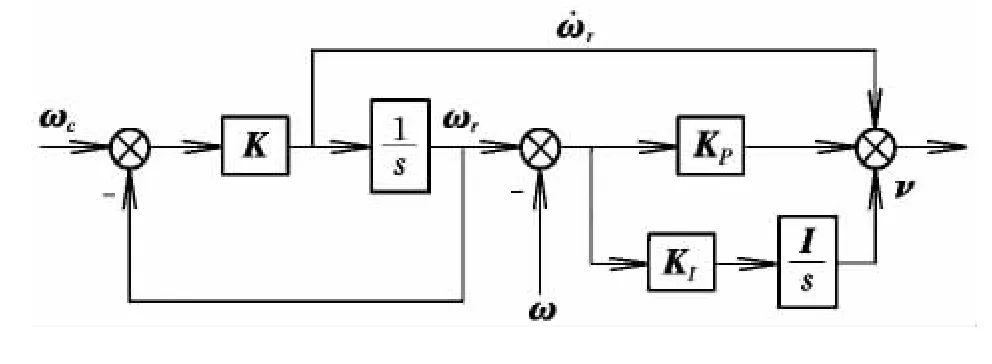
图4 指令滤波器及PI控制结构Fig.4 Block diagram of command filter and PI control
4.2 法向加速度控制律
受油机的法向加速度控制是通过改变飞机的俯仰角速率实现的,故法向加速度控制律可设计为:

由制导系统生成的法向加速度指令与飞机实际的法向加速度存在误差时,通过上述控制律生成俯仰角速率指令,经过角速率回路控制律实现对飞机法向加速度的控制。
4.3 侧向加速度控制律
受油机的侧向航迹的控制是通过飞机滚转实现的。由飞机协调转弯的受力分析,侧向加速度与滚转角有如下关系:

故由制导系统得到的受油机侧向加速度指令可形成如下的滚转角指令:

由滚转角指令通过比例积分,得到滚转角速率指令为:

4.4 侧向协调控制律
受油机的方向舵通道主要用于协调控制,目的是消除飞机的侧滑角,飞机的侧滑角速率可用下式表示:

由上式可得到对应的偏航角速率指令:

其中:

4.5 前向速度控制律
由制导系统得到的前向加速度指令积分得到速度指令信号,该指令信号与飞机当前的速度比较,通过PID形成油门控制信号。其控制律为:

5 仿真验证与分析
为验证所设计系统的控制效果,对图1的空中加油会合控制系统进行数值仿真。受油机数学模型采用某飞机六自由度动力学模型,加油机采用简化的质点动力学模型。
假定加油机在6 km高度,以180 m/s的速度沿北向直线平飞。受油机的初始飞行高度为5 km,位于加油机飞行方向的右后方,距离加油机后方4 km,右侧1 km的位置,以初始速度250 m/s飞行,与加油机同向飞行。
当受油机接收到会合指令后,根据受油机与加油机当前的位置关系,制导系统生成相应的加速度指令信号,通过飞行控制系统,控制飞机按照一定的规律与加油机会合。图5为空中加油会合过程中的受油机与加油机在地面坐标下的三维飞行轨迹。图6为对应的受油机与加油机在会合过程中的位置误差曲线。
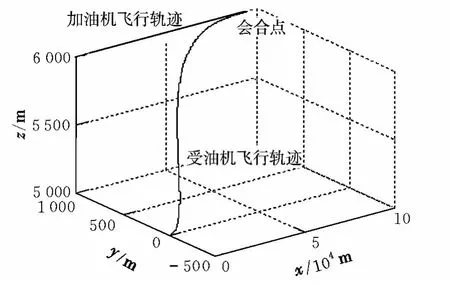
图5 加油机与受油机会合的三维飞行轨迹Fig.5 3D flight trajectory of receiver and tanker

图6 地面坐标系下的两机位置误差曲线Fig.6 Time histories of trajectory error in earth fixed axes
图7 为会合过程中受油机的姿态变化曲线。图8为受油机的速度、迎角及侧滑角曲线。仿真结果表明,所设计的系统能够根据受油机与加油机的位置误差形成制导指令,通过飞行控制系统,最终控制受油机飞行并与加油机实现会合,会合过程受油机飞行轨迹平滑,飞行状态平稳。为下一步实现受油机受油插头与加油机加油锥套的对接奠定基础。
由于制导算法中涉及受油机与加油机距离的倒数,当距离接近零时会导致系统发散。在实际会合过程中,当受油机接近到加油机锥套后方25 m、下方3 m左右时,会合控制模式结束,基于视线的制导律终止。转入到需要对受油机轨迹精确控制的对接控制模式。

图7 受油机姿态响应曲线Fig.7 Time histories of receiver attitude
6 结束语
本文根据由GPS测量的受油机与加油机的三维空间位置,基于视线法原理,采用比例制导生成受油机的会合制导指令,制导形式简单,易于工程实现。采用反馈线性化方法实现了角速率回路的解耦与控制,在此基础上,分别设计了法向加速度控制、侧向加速度控制、方向舵协调控制及速度控制,满足制导指令跟踪要求。基于六自由度非线性动力学模型的仿真结果表明,受油机会合的飞行轨迹平滑,飞行状态稳定,具有良好的动态性能。
[1] Joseph P N,Jacob L H.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA-2005-6005,2005.
[2] Dibley R P,Allen M J,Nabaa N,et al.Autonomous airborne refueling demonstration,phase I flight-test results[R].NASA/TM-2007-214632,2007.
[3] Brian S B.Autonomous unmanned aerial vehicle rendezvous for automated aerial refueling[D].Ohio:Air Force Institute of Technology,2007.
[4] Austin L S.Proportional navigation with adaptive terminal guidance for aircraft rendezvous[J].Journal of Guidance,Control,and Dynamics,2008,31(6):1832-1835.
[5] Jane-wit Kampoon,Atilla Dogan.Guidance of receiver aircraft to rendezvous with tanker in the presence of wind[R].AIAA-2010-8326,2010.
[6] 郭军,董新民,徐跃鉴,等.无人机空中加油自主会合控制器设计[J].控制与决策,2010,25(4):567-571.
[7] Yoshimasa O,Takeshi K.Flight control for automatic aerial refueling via PNG and LOS angle control[R].AIAA-2005-6268,2005.
[8] Imado F,Uehara S.High-g barrel roll maneuvers against proportional navigation from optimal control viewpoint[J].Journal of Guidance,Control,and Dynamics,1998,21(6):876-881.
[9] Dogan A.Venkataramannan S.Nonlinear control for reconfiguration of unmanned aerial vehicle formation[J]Journal of Guidance,Control,and Dynamics,2005,28(4):667-677.
[10] Pedro J O,Panday A,Dala L.A nonlinear dynamic inversion_based neurocontroller for unmanned combat aerial vehicles during aerial refueling[J].International Journal of Applied Mathematics and Computer Science,2013,23(1):75-90.
[11]吴森堂,费玉华.飞行控制系统[M].北京航空航天大学出版社,2005:56-61.
猜你喜欢
文萃报·周五版(2021年33期)2021-09-12 02:34:25
活力(2021年6期)2021-08-05 07:24:44
文萃报·周二版(2021年5期)2021-03-02 10:56:02
通信电源技术(2020年1期)2020-01-06 11:21:34
通信电源技术(2016年5期)2016-03-22 01:10:05
汽车实用技术(2015年8期)2015-12-26 09:01:02
中国航海(2014年4期)2014-11-29 03:01:56
航空世界(2014年7期)2014-09-24 19:29:08
河南科技(2014年23期)2014-02-27 14:19:03
电子设计工程(2014年18期)2014-02-27 12:00:19
