
基于微分对策的导弹智能机动突防研究
2014-12-25 09:20鲜勇田海鹏王剑史金倩
飞行力学 2014年1期
鲜勇,田海鹏,王剑,史金倩
(1.第二炮兵工程大学7系,陕西西安710025;2.中国人民解放军96630部队,北京100025)
0 引言
随着不断地发展和试验,美国中段防御系统日趋成熟,其部署对我国导弹的中段飞行构成了重要威胁[1]。为提高导弹的作战效能,必须进行有效的突防。随着技术的不断创新,突防手段实现了多样化,其中弹头中段机动成为重要的突防手段。考虑弹头的有效载荷和机动过载限制,机动的时机和方向对弹头成功突防起着非常重要的作用。弹头中段飞行过程中,由美国防御系统释放的动能拦截器EKV(Exo-atmospheric Kinetic Vehicle)和弹头形成撞击-规避关系,可看成是“二人零和”博弈[2]问题。文献[3]基于微分对策对导弹中段突防进行了初步的研究,得出选择适当的时机机动可实现有效突防的结论。文献[4]用遗传算法求解冲量机动突防时机的突防方案,得出冲量机动在拦截末段最有效的结论。上述方法对分析弹头和EKV进行博弈的过程具有重要意义,但未对弹头全局的机动策略进行考虑。由于微分对策方法要求大量的计算,弹上的计算机无法满足要求,此方法尚未发展到实际应用的水平。
本文基于智能微分对策理论,建立了弹头与EKV对抗模型,将脱靶量和能量消耗作为EKV与弹头对抗指标,考虑弹头机动过载和控制变量的约束,建立了使用该方法的突防决策模型,并通过仿真验证了该方法的有效性。
1 弹头与EKV对抗模型
1.1 模型假设
为了便于研究,采用如下假设:
(1)弹头和EKV可视为质点;
(2)EKV末段拦截起点处于零控拦截状态[5];
(3)EKV 的最大轨控加速度为4g[6];
(4)EKV的速度为6~7 km/s;
(5)EKV捕获弹头时弹目距离为200 km[6]。
1.2 弹头运动状态方程
弹头进行中段飞行时仅考虑地球引力、柯氏及牵连惯性力。设发射系[7]下运动状态变量为m=[xm,ym,zm,vmx,vmy,vmz]T,加速度矢量为 um=[amx,amy,amz]T,则弹头在自由段的加速度为:
1.3 EKV运动状态模型
EKV运动状态方程和弹头相似,不同点在于加速度矢量不同。设EKV的加速度矢量为un=[anx,any,anz]T。EKV 采用扩展比例导引律,导引方程为[6,8]:

式中,K为比例导引系数;vr为EKV在弹头发射坐标系中的径向速度大小为视线角速度;为EKV对弹头加速度的估计。其中:

式中,θE,φE分别为EKV速度在其牵连坐标系中的俯仰角和偏航角;θL,φL分别为弹目视线在EKV牵连坐标系中的俯仰角和偏航角;TE为EKV的帧频。
根据模型需要,本文建立如图1所示的坐标系。图中,OeExeEyeEzeE为EKV牵连坐标系;O1Ex1Ey1Ez1E为EKV弹体系。
EKV 弹体系上的加速度为[0,aE]T,其中 aE=并且不超过 4g。则有:

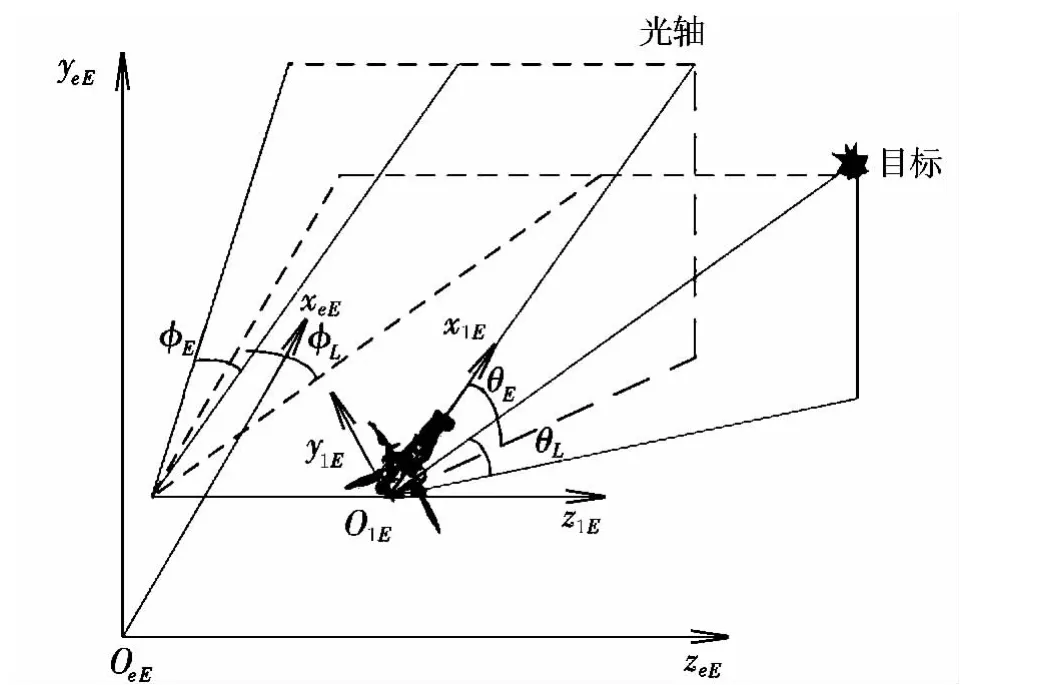
图1 EKV模型中的坐标系Fig.1 Coordinate system of the EKV model
2 机动方案设计
本文设计弹头借助双星预警系统[7],在EKV捕获目标后(此时弹目距离小于200 km),计算出EKV的位置和速度信息并传输给弹头。
2.1 机动策略
设弹头在质心位置处垂直于射面的正负两个方向各安装1个喷管,能产生2g的加速度。参照文献[8]得出的弹头进行发射系z轴负向机动时效果最好的结论,本文设计的弹头在进行机动突防时,垂直于发射坐标系Oxmym面机动,如图2所示。

图2 垂直发射坐标系Oxmym面机动Fig.2 Maneuver to the vertical Oxmym plane of the launch coordinate
2.2 试探性机动
由于EKV在捕获弹头时处于零控拦截状态,并且当弹头在EKV与弹头相距200 km机动时,在EKV的红外导引头上产生的横向视线角变化率最小,即此时的EKV探测弹头轨道变化的灵敏度较低,因此弹头向一个方向作一次持续的机动有利于扩大终端脱靶量。
本文设定EKV捕获弹头时的时间为t1,此时弹头开始垂直发射系Oxmym面负向机动,机动持续时间Δt。由于EKV末段拦截时间为17~20 s,所以弹头试探性机动时间不长,要为智能机动突防留下时间,可设 Δt=8 s。
3 微分对策数学模型
借助微分对策思想,将连续问题离散化,设拦截弹(E)、弹头(V)为对策双方,博弈的流程如图3所示。
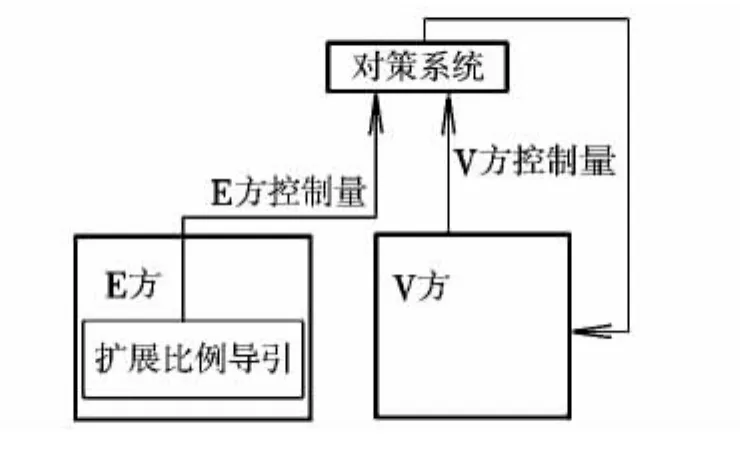
图3 拦截弹和弹头的博弈流程Fig.3 Game process of the interceptor missile and the warhead
系统的状态方程和初始状态为:

式中,x(k)为对策系统状态;u(k),v(k)分别为V方和 E 方的控制变量,u(k)∈Uk=[-1,0,1];u(k)=-1时弹头以2g的加速度垂直于发射系Oxmym面作负向机动;u(k)=0时弹头不作机动;u(k)=1时弹头以2g的加速度垂直发射系Oxmym面作正向机动。
系统以EKV的脱靶量和弹头实施机动所消耗的控制能量为考核目标,设代价函数为:

式中,θ(x(kf),kf)为终端脱靶量;L(x(k),u(k),v(k),k)= -u(k)2/400。
假设x(k),u(k)分别为n维和m维列向量,b(k)为s维列向量,f,L,g是其所有变量的连续可微函数。集合Uk由不等式g(u(k),k)≥b(k),k=k0,k0+1,…,kf- 1 给出,例如:gi(u(k),k)=bi(k)=0。
最优控制问题是:求u(k)使u(k)∈Uk并使J最大。下面将最优控制问题化为非线性规划问题。设

规定xn+1(k0)=0,则有:

令

则状态方程可写成:

称为增广系统的状态方程。得到的非线性规划问题为:
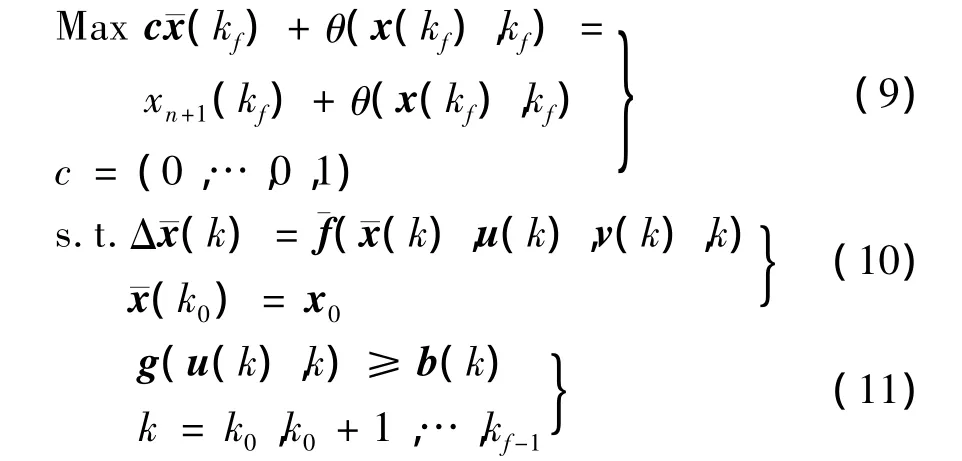
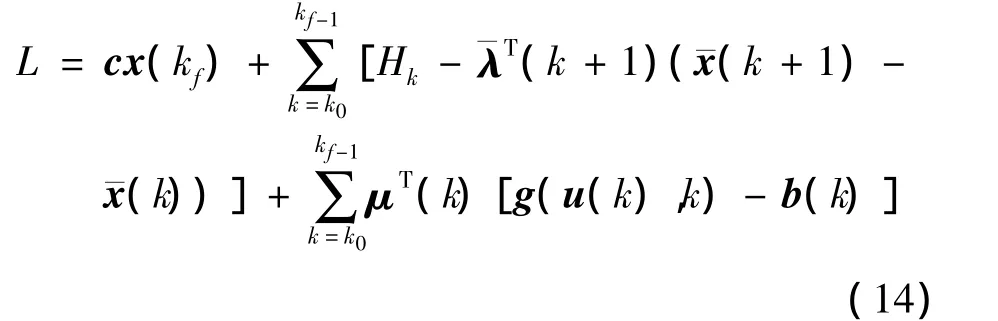
考虑拉格朗日函数:


拉格朗日函数化为:
非线性规划问题式(9)~式 (11)的解满足的必要条件如下:
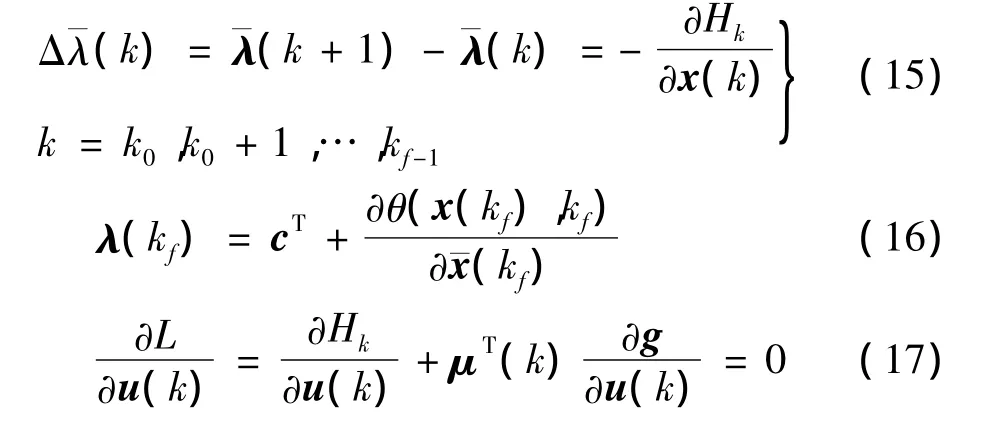

应用非线性规划问题解的充分性条件的定理,如果Hk是凹的,g(u(k),k)是凸的,那么条件式(17)、式(18)保证 u(k)使式(13)作为 u(k)的函数,在约束条件g(u(k),k)≥b(k)下达到最大值,即条件式(17)、式(18)可用条件
代替。由必要条件式(16)及 c=[0,…,0,1]得:

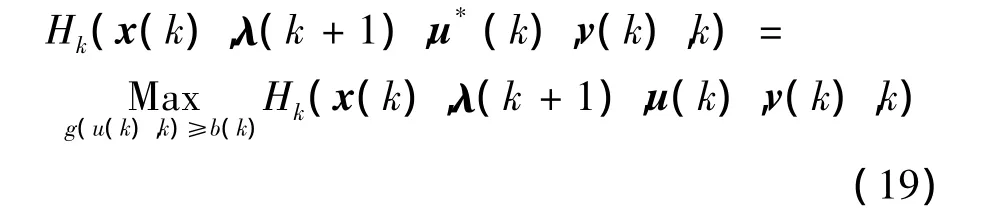
又由于Hk不显含xn+1,因此,式(15)的最后一个方程为 Δλn+1(k)=0,于是 λn+1(k)=1,哈密顿函数可改写为:

这样,上述必要条件归结为:x*,u*,λ*满足
4 仿真及分析
下面以一条典型的战略导弹弹道为例,进行导弹中段智能突防的仿真研究。
通过计算,得出弹头不作机动时的弹头轨迹和EKV的拦截轨迹,如图4所示。仿真结果表明,拦截结束时脱靶量小于3 m,EKV拦截成功,验证了本文所建拦截器模型的正确性。
图4 弹头与EKV的飞行轨迹Fig.4 Flight trajectory of the warhead and the EKV
本文设定EKV的导引系数K=3,弹头机动时间t1=1 536.96 s,持续时间Δt=8 s。当弹头用本文的微分对策模型得出的控制量进行机动时,得到的脱靶量为8.5 m,EKV拦截失败,验证了本文方法的有效性。
将目标弹头作垂直于发射系Oxy平面的负向机动和不作机动时的EKV横向视线角(λx)变化和视线角速率()进行对比,如图5和图6所示。

图5 EKV横向视线角变化曲线Fig.5 Horizontal line of sight angle curve of the EKV
图6 EKV横向视线角速率变化曲线Fig.6 Horizontal line of sight angular rate curve of the EKV
由EKV的拦截结果可知,当弹头不作机动时,扩展比例导引律能有效抑制视线角速率的发散,使脱靶量很小;当弹头利用微分对策的方法进行智能机动时,EKV测得的视线角和角速率出现了较快的发散。
5 结束语
本文基于微分对策理论,研究了弹头在中段飞行中的机动突防问题,将弹头和EKV看作“二人零和”博弈的主体,建立了微分对策模型,得出弹头的最优规避策略。仿真结果验证了方法的有效性,得到的最优策略集可制成指令库装订到弹头上。该方法为微分对策理论在弹上的实现提供了重要的理论参考。
[1] 袁俊.导弹防御系统的弹道导弹突防[J].上海航天,2005,(1):48-51.
[2] 朱˙费登伯格,让˙梯诺尔.博弈论[M].黄涛,等 译.北京:中国人民出版社,2010:53-65.
[3] 孙守明,汤国建,周伯昭.基于微分对策的弹道导弹机动突防研究[J].弹箭与制导学报,2010,30(4):65-68.
[4] 冯杰.弹道导弹“主动规避”式机动突防技术研究[D].西安:第二炮兵工程学院,2007.
[5] 汤一华,陈士橹,万自明.基于零控脱靶量的大气层外拦截中制导研究[J].飞行力学,2007,25(3):34-37.
[6] Wang L,Jing Z,Yang Y,et al.Analysis and simulation on the intercepting performance of EKV[C]//System Simulation and Scientific Computing,ICSC 2008.Asia Simulation Conference-7th International Conference on IEEE,2008:643-646.
[7] 徐增.基于天基预警系统的导弹被动段弹道估计算法研究[D].哈尔滨:哈尔滨工业大学,2006.
[8] 雍恩米,唐国金,罗亚中.弹道导弹中段机动突防制导问题的仿真研究[J].导弹与航天运载技术,2005,(4):13-18.
猜你喜欢
兵工学报(2022年9期)2022-10-11
家庭科学·新健康(2022年2期)2022-03-07
特区文学·诗(2021年6期)2021-12-22
矿产勘查(2020年11期)2020-12-25
现代防御技术(2018年5期)2018-10-29
考试周刊(2018年15期)2018-01-21
金色少年(奇趣科普)(2017年11期)2017-11-28
当代贵州(2015年19期)2015-06-13
中华肩肘外科电子杂志(2015年2期)2015-01-22
新疆农垦科技(2014年9期)2014-02-28
