
基于IWOABC的垂直阵风减缓控制律设计
2014-12-25 09:20朱江乐邱岳恒章卫国赵鹏轩
飞行力学 2014年1期
朱江乐,邱岳恒,章卫国,赵鹏轩
(1.西北工业大学自动化学院,陕西西安710072;2.西安飞机设计研究所飞控液压所,陕西西安710089)
0 引言
在大气中,经常有各个方向的气流,由于大型客机的机翼载荷较小,在这种不平静空气中飞行时将会产生较大的过载,不仅会降低乘坐舒适性,严重时甚至会造成伤害事故[1]。其中,垂直方向阵风引起的过载对客机的影响最大,当飞机在平静大气中保持平飞状态,遇到上升气流扰动时,其大小和方向均会改变[2]。由此可见,由于大气扰动的影响,将使机翼所承受的附加过载与垂直阵风速度成正比。为了减小大气扰动对飞机结构强度的影响,减轻飞机的重量,有必要采取措施减少大气扰动所引起的法向过载,从而达到减轻飞机结构重量的目的。
阵风减缓系统有时也被称为载荷减缓系统[3]。阵风减缓控制根据使过载增量最小化来衡量控制效果,其中控制参数的设计对阵风减缓的优劣有较大影响。采用经典方法设计控制参数时,为了便于分析,往往会简化掉一些因素,如饱和、延迟等,最终得到的参数对系统而言未必是可靠的。如果采用优化方法,则可以较方便地将因素转化为寻优中的约束条件,使约束下达到设定精度的寻优结果更为可靠。
在各种优化方法中,人工蜂群优化(Artificial Bee Colony,ABC)[4]是2003 年由 Teodorovic 在 Seeley建立的蜂群自组织模拟模型的基础上提出的一种新的进化计算算法。由于每次迭代中都进行全局和局部搜索,求解非限制性数值优化函数的性能比常见的启发式算法更具优势。虽然ABC算法在许多优化问题中都优于粒子群、差分进化等遗传算法,但是由于进化方式和选择策略的影响,在快速收敛的同时,算法有时易陷入局部最优或早熟收敛。为解决这一问题,将杂草入侵机制(Invasive Weed Optimization,IWO)[5]引入 ABC 算法,以便改善上述问题。
本文提出了一种阵风减缓控制系统设计方案,并通过基于杂草入侵机制的人工蜂群优化算法(IWOABC)实现其控制参数设计。在飞机遭到垂直阵风干扰的情况下,评估了该方案的控制效果,以验证该系统改善飞机乘坐品质的特性。
1 阵风减缓控制系统设计
1.1 系统功能
本文仅讨论在垂直阵风作用下的载荷减缓控制系统设计,其功能为:
(1)实现机体载荷减缓:较少因阵风扰动产生的附加法向过载;
(2)实现乘坐品质控制:保证乘员在大气扰动下的乘坐舒适性,满足美军标MIL-F-9490D中有关乘坐品质指标的要求。
1.2 构成方案
阵风减缓控制系统基本有两种控制方案:开环控制与闭环控制。
(1)开环控制:通过直接测量大气扰动,驱动相应的操纵面,实现对大气扰动不变性控制。优点是系统设计不影响系统的稳定性,缺点在于它的有效性取决于大气扰动的精确测量,而在实际中,直接进行大气扰动测量是非常困难的。
(2)闭环控制:通过测量阵风引起的过载,采用直接力控制相应的飞机操纵面来降低阵风作用于机翼上的载荷。优点是不需要对阵风进行精确测量,缺点在于飞行控制系统的稳定性会受到影响。
在研究了大量国内外所采用的控制方案基础上,本文采用闭环阵风减缓控制方案,以减轻阵风给飞机带来的机翼结构疲劳。
1.2.1 阵风和飞机综合模型
垂直阵风引起的等效气动效果为速度和迎角增量(Δv,Δαg),相当于在飞机方程中引入了 Δv和Δαg的干扰。它们对飞机运动的影响相当于对v和α的影响。
飞机受到阵风作用的纵向运动方程为:

式中,A和B分别为飞机的系统阵和控制阵;q为俯仰角速度;θ为俯仰角;δa和δe分别为副翼和升降舵偏转角。
1.2.2 阵风减缓闭环控制系统设计
本文取俯仰角速率和法向加速度作为反馈信号,选取外侧副翼和升降舵作为阵风减缓系统的直接升力操纵面。在加速度反馈通道中,使用加速度驱动副翼不仅可以有效地抑制引起法向过载的阵风干扰,使航迹控制更为精确,还能有效改善乘坐品质,减少飞行员的工作负担;通道上的高通滤波器可以改善飞机长周期的稳定性。在角速率反馈通道中,将升降舵作为力矩补偿操纵面,抵消副翼偏转将会引起飞机的角运动,实现飞机的稳定控制;通道上的低通滤波器可以恰当地调整飞机的操纵品质。具体框图如图1所示。

图1 闭环控制系统框图Fig.1 Block diagram of closed-loop control system
法向过载响应的减缓率为ζ,则:

1.2.3 乘坐品质评价准则
在MIL-F-9490D中,没有显示比例系数的取值,所以不便于使用。这里列出在工程中常用的乘坐品质评价指标:

将计算所得指标数值分等级来评定乘坐品质,具体如表1所示。
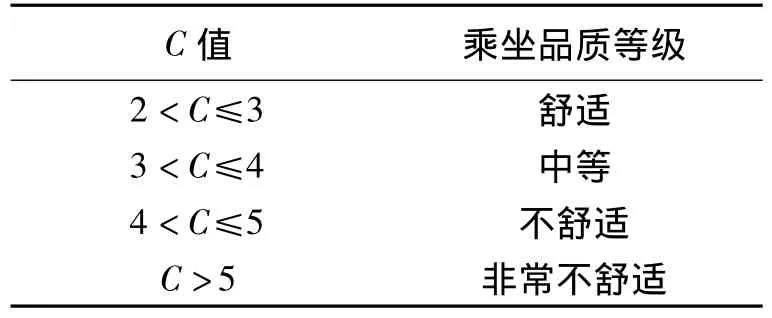
表1 乘坐舒适性指标Table 1 Ride comfort index
1.3 阵风减缓控制律设计
1.3.1 控制律设计
如图1所示,阵风减缓控制系统是在增稳控制系统的基础上进行设计的。增稳控制系统采用比例控制(P),控制参数为Kp1;阵风减缓系统采用比例加积分(PI)控制,控制参数分别为Kp2和Ki。
本文在无阵风减缓控制的情况下,优化对象为增益Kp1;在有阵风减缓控制的情况下,优化对象为图中所示的全部3个增益(Kp1,Kp2和Ki),目的均是使法向过载的均方根值最小。
1.3.2 基于IWOABC算法的控制参数设计
在ABC算法[6]中:Ns为蜜蜂总数;Ne为采蜜蜂种群规模;Nu为跟随蜂种群规模,Ne=Nu;D为搜索空间维度,S=RD为个体搜索空间;SNe为采蜜蜂种群空间。若xi∈S(i≤Ne)是Ne的个体,则X=(x1,…,xNe)代表一个采蜜蜂种群。X(0)为初始采蜜蜂种群;X(n)为第n代的采蜜蜂种群;f:S→R+表示适应度函数。具体算法步骤为:
(1)当 n=0,随机生成 Ns个可行解 X=(x1,…,xNe),具体随机产生的可行解xi为:

(2)对于第n步的采蜜蜂xi(n),在当前位置向量附近领域进行搜索新的位置,搜索公式为:

式中,j∈{1,2,…,D};k∈{1,2,…,Ne},且 k≠i,j和k均随机生成为[-1,1]之间的随机数,同时保证V∈S。
(3)采用贪婪选择算子在采蜜蜂搜索到的新位置vi和原向量xi中选取具有更优适应度的保留给下一代的种群,记作:Ts:S2→S,其概率分布为:

贪婪选择算子保证了种群能够保留精英个体,使得进化方向不会倒退,显然,Ts分布与时刻 n无关。
(4)各跟随蜂依照采蜜蜂种群适应度值大小选择一个采蜜蜂,并在其邻域内同样进行新位置的搜索(类似步骤(2))。
该选择算子是在一个采蜜蜂种群内选择一个个体,采用轮盘赌选择方式,选择概率公式为:

式中,TS1:SNe→S,其概率分布与当前时刻n无关。
(5)同步骤(2)和步骤(3),记下种群更新过后达到的最新适应度值fbest及其对应的位置(x1,x2,…,xD)。
(6)当在某只采蜜蜂的位置周围搜索次数Bas到达一定次数限制Limit而仍没有满足条件时,重新随机初始化这个采蜜蜂的位置。

(7)如果满足停止条件,终止计算并输出最优适应度值 fbest及其对应的位置(x1,x2,…,xD),否则转向步骤(2)。
ABC算法较好地平衡了全局探索和局部开发的能力,具备较快的收敛速度,但是受到选择策略和进化方式的影响,容易陷入局部最优或早熟收敛。式(7)轮盘赌式的选择策略是一种基于贪婪策略的方式,容易忽视非最优蜜源的贡献而陷入局部最优,降低种群多样性,不利于搜索全局最优解;式(5)的进化方式是形式的交叉方式,一定程度上避免了陷入局部最优,但是交叉存在的盲目性,有可能降低算法的收敛速度。
为了解决以上不足,将IWO算法中子代生长繁殖和空间分布机制引入到ABC算法,对原有选择策略和进化方式进行改进,具体如下:
为避免因轮盘赌的选择方式使跟随蜂过于被吸引到最优蜜源周围,借鉴IWO中杂草产生种子数的方式,限制蜜源能吸引蜜蜂的数量,具体为:

式中,bmax,bmin,bn为第n个蜜源最多、最少和实际吸引跟随蜂的数量;f为当前蜜源适应度函数值;fmin和fmax分别为当前迭代所有蜜源的适应度最小值和最大值为向下取整运算符。按蜜源适应度值fmax→fmin的顺序,用式(6)计算依次各蜜源所能吸引蜜蜂的数量,直至吸引完所有的跟随蜂。
为了降低式(2)交叉方式的盲目性,使跟随蜂在蜜源周边更合理地分布,借鉴杂草子代的空间分布机制,将跟随蜂按正态分布N(0,σ2)随机飞到目标蜜源附近,进行邻域搜索。随机迭代的标准差更新公式为:

式中,σini,σfin,σiter分别为标准差的初始值、最终值和当前值;Maxiter为最大迭代次数;Iter为当前迭代次数;n为非线性调节因子,通常取n=3。
2 仿真分析
2.1 基准测试函数仿真
为验证IWOABC算法改进的有效性,与原ABC算法采用相同的基准测试函数进行仿真对比。限于篇幅,这里仅列出测试函数Sphere和Griewank的测试结果,测试维数100维,各维搜索空间为(-100,100),这两个函数的极小值均为0。为消除单次测试的随意性,连续测试20次,取测试结果最小值、平均值和标准差进行比较。Ns=30,Ne=15,Nu=15,Maxiter=2 500,Limit=100,bmax=4,bmin=1,σini=50,σfin=0.05。测试结果如表2所示,可见改进后的算法较原有算法具有更强的寻优能力。

表2 基准测试函数测试结果Table 2 Test results of benchmark function
2.2 阵风减缓仿真
本文仿真的系统模型为某大型运输机。仿真条件为:飞行高度5 km;巡航速度为170 m/s;副翼和升降舵特性均为30/(s+30)。选取Dryden连续阵风和半波长1-cos型离散阵风模型。中等连续阵风的均方根值为1.810 3;中等离散阵风的幅值为3.5 m/s。本文优化的目标为使法向过载均方根值最小。由于ABC算法的适应度函数为求大型,因此将适应度函数设计为:

由于需要求解3个增益参数,所以搜索维度D=3,各维取值范围与增益参数取值范围[-3,3]相同。IWOABC算法的参数设置为:Ns=30,Ne=Nu=0.5Ns,Maxiter=200,Limit=20,bmax=4,bmin=1。
IWOABC算法优化完成后,得到的控制律增益参数为:0.102 5,1.016 4,-2.248 0(经过大量仿真验证,针对各种阵风程度,得到的控制律参数中均能实现其阵风减缓。限于篇幅,仅以中度离散阵风干扰下为例进行有阵风减缓控制参数寻优)。在中度垂直阵风干扰下,有无阵风减缓控制的法向过载响应曲线如图2和图3所示。
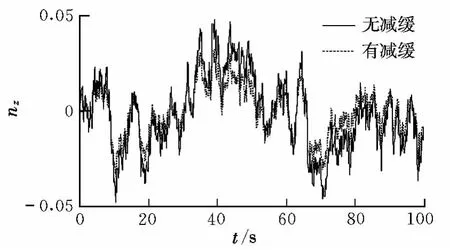
图2 连续阵风干扰下有无阵风减缓控制的过载曲线Fig.2 Load response curve under continuous gust with gust alleviation control or not

图3 离散阵风干扰下有无阵风减缓控制的过载曲线Fig.3 Load response curve under discrete gust with gust alleviation control or not
由图2和图3可知,采用阵风减缓控制系统的飞机对法向过载增量有比较明显的减缓作用。
将过载减缓效果进行量化,以过载响应量的均方根值的变化率来评价控制系统减缓的效果。连续和离散阵风干扰下法向过载的均方根值分别为nzD和nzL,减缓效果如表3所示。

表3 法向过载均方根值与减缓率Table 3 RMS and decreasing rate of normal load
由表3可知,采取阵风控制系统的法向过载增量的减缓率较高,尤其是在离散阵风干扰情况下,减缓效果更加明显。
为了准确评价模型飞机的乘坐品质,选取飞机质心为基点,对阵风干扰下的过载响应进行乘坐品质C准则评估。将无阵风减缓控制和有阵风减缓控制分别记为C0和C1。具体数据如表4所示。
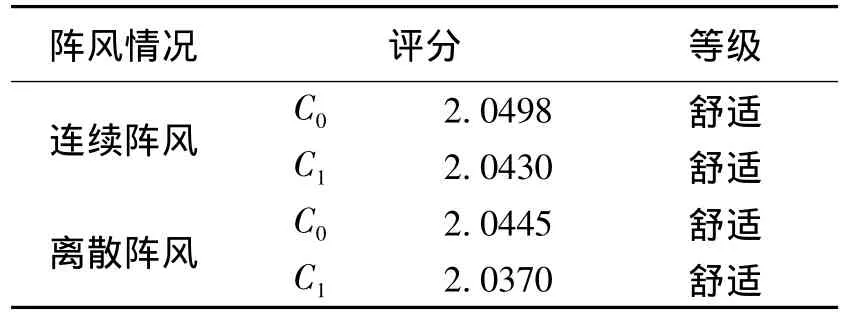
表4 乘坐品质评价Table 4 Evaluation of ride quality
由表4的结果可以看出,在不同阵风类型的影响下,采用阵风减缓控制系统的飞机能在一定幅度上改善乘坐舒适度指数。
3 结束语
本文针对大型客机在垂直阵风干扰下会产生较大的附加法向载荷,提出了一种基于乘坐品质改善和载荷减缓的闭环控制方案。此外,为提高人工蜂群优化算法对控制律参数设计的能力,引入杂草入侵机制改进算法,并应用到阵风减缓控制系统的参数寻优中。仿真结果表明,在连续和离散阵风干扰的情况下,应用上述控制方法能改善因阵风引起的乘坐品质下降问题,而且在离散阵风干扰的情况下,减缓效果最为明显。
[1] 文传源.现代飞行控制[M].北京:北京航空航天大学出版社,2004:187-192.
[2] 毛珊珊,张平.垂直阵风作用下乘坐品质控制系统设计[C]//中国制导、导航与控制学术会议.北京,2012:565-568.
[3] 高金源.飞机电传操纵系统与主动控制技术[M].北京:北京航空航天大学出版社,2005:161-168.
[4] Teodorovic D,Dell M O.Bee colony optimization_a cooperative learning approach to complex transportation problems[C]//Proceedings of 10th EWGT Meeting and 16th Mini EURO Conference.Poznan,Poland,2005:51-60.
[5] Mehrabian A R,Lucas C.A novel numerical optimization algorithm inspired from weed colonization[J].Ecological Informatics,2006,1(4):355-366.
[6] 段海滨,张祥银,徐春芳.仿生智能计算[M].北京:科学出版社,2011:93-94.
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13
飞控与探测(2022年6期)2022-03-20
军事文摘(2021年19期)2021-10-10
军事文摘(2021年17期)2021-09-24
力学学报(2020年4期)2020-08-11
航空世界(2018年12期)2018-07-16
黑龙江电力(2017年1期)2017-05-17
光学精密工程(2016年1期)2016-11-07
中国铁道科学(2015年4期)2015-06-21
实验技术与管理(2014年12期)2014-03-11
