
基于编码器的复摆设计与实验研究
2014-12-24 06:40:24姚宇峰张智鹏
大学物理实验 2014年5期
张 凯,姚宇峰,刘 紫,张智鹏
(北京林业大学,北京 100083)
复摆[1]是指一刚体在重力作用下绕一水平轴做微小摆动的运动动力体系。通过复摆实验可以测量重力加速度[2-4]、物体的转动惯量[3,5-10]以及验证平行轴定理[11]等。如针对重力加速度的测量,代伟[2]提出了两种复摆模型,但是并未将两种模型利用一套装置来实现,装置利用率较低。另外针对物体的转动惯量测量,徐军华等[10]利用复摆法测定了刚体的转动惯量并验证了平行轴定理。
以上所提及的复摆[2,10]主要是采用光电法来完成复摆的实验研究。鉴于编码器精度高以及简化实验装置的目的,采用编码器和单片机来完成复摆实验研究[12-13]。该实验装置能采用多种方式完成重力加速度和物体转动惯量的测量,并能验证平行轴定理。
1 实验装置的设计
采用光电法进行复摆实验研究需要测角仪、光电门以及计时器等仪器,实验装置较为复杂。如图1所示,采用编码器和单片机组合的实验装置则省去了这些仪器。实验过程中,通过蜂鸣器进行提醒,起到限制复摆起摆角度的作用,同时利用单片机实现对摆动周期的测量。
2 实验研究
2.1 利用方案一测量重力加速度与转动惯量
如图1所示,将复摆摆杆的每个小孔依次悬挂在编码器轴上,以小于5°的起摆角度进行小摆幅摆动,测量每次摆动的多个周期,最后取平均值并记录。如图2所示,为复摆周期T与转轴位置h之间的关系图,其中h为转轴与摆杆质心的距离,T为对应的摆动周期。
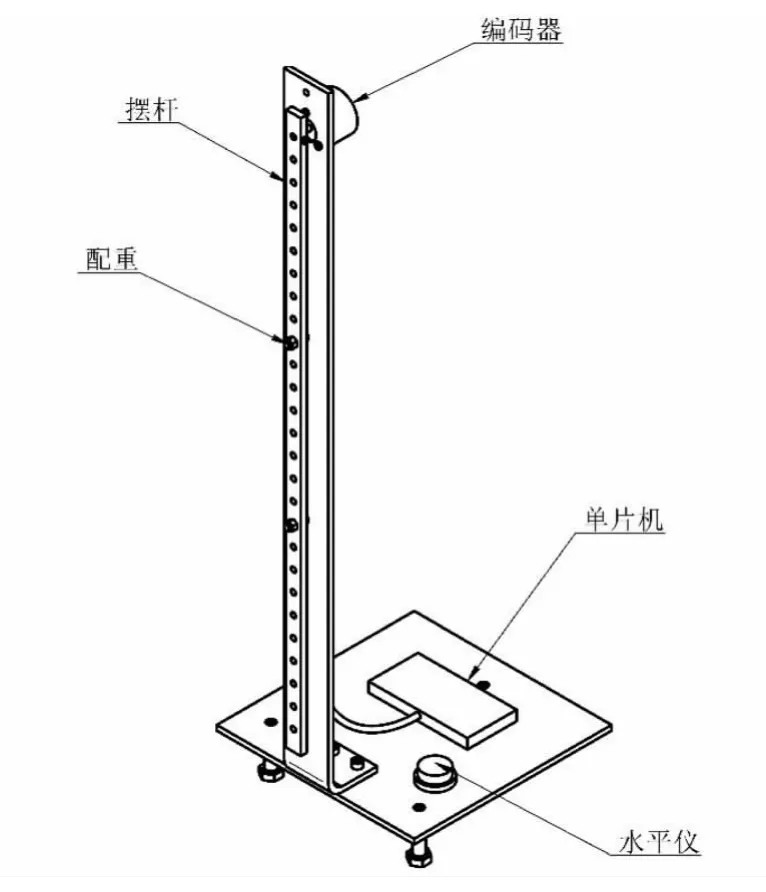
图1 复摆结构示意图
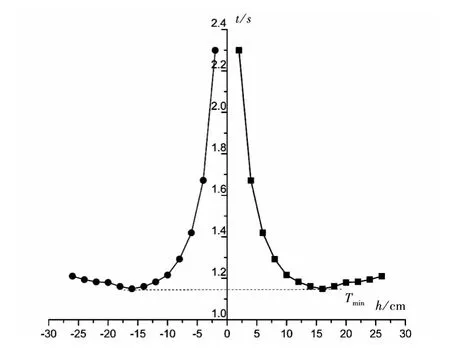
图2 周期T与回转轴到质心距离h曲线图
如图2所示,取最低两点对应的横坐标绝对值为回转半径R,所对应的纵坐标值为最小摆动周期Tmin。由上述测量数据,再根据公式(1)即可得到重力加速度的数值[3]。

根据回转半径的定义即公式(2),易得通过质心轴的转动惯量 Ic[3]。

由图2,可得摆杆的回转半径R=16 cm=0.16 m,对应的最小周期 Tmin=1.14 s。通过式(1)计算得g=9.72 m/s2,可知摆杆质量m0=123.86 g,则摆杆转轴过质心的转动惯量Ic=3.171×10-3kg/m2。
2.2 利用最小二乘法测量重力加速度和通过质心轴的转动惯量
令 y=T2h,x=h2,通过测量可得n组(x,y),在Matlab中利用最小二乘法拟合出直线y=A+Bx,如图3所示,其中截距 A为R2,斜率 B为 。
通过实验可得,斜率B=4.115 5,截距A=0.106 9。再由 A=R2和B=,可得重力加速度 g=9.60 m/s2,回转半径 R=0.161 2 m。最后由公式(2)可得通过质心轴的转动惯量为Ic=3.219 kg/m2。
2.3 利用方案三测量重力加速度
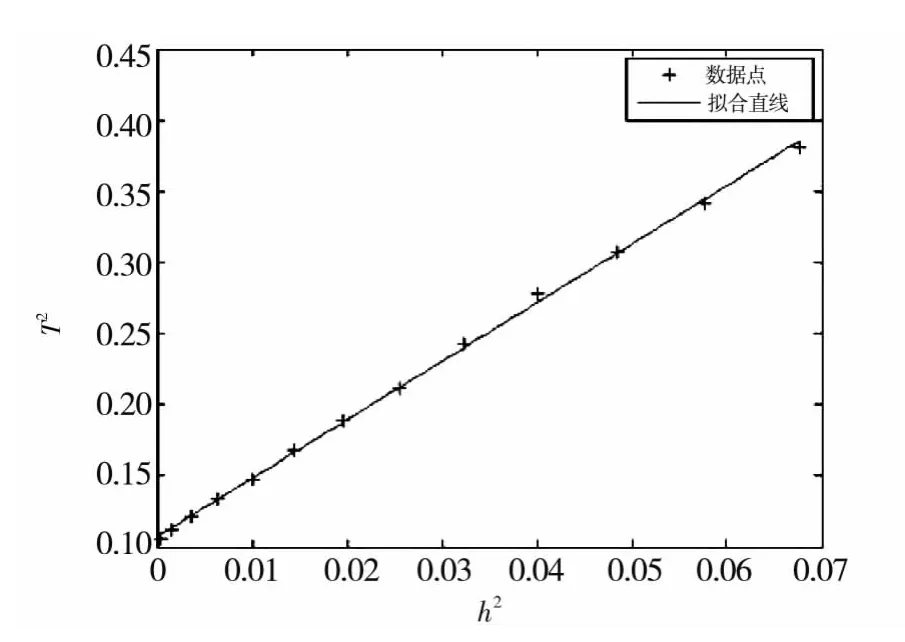
图3 利用最小二乘法的h2-T2的拟合直线
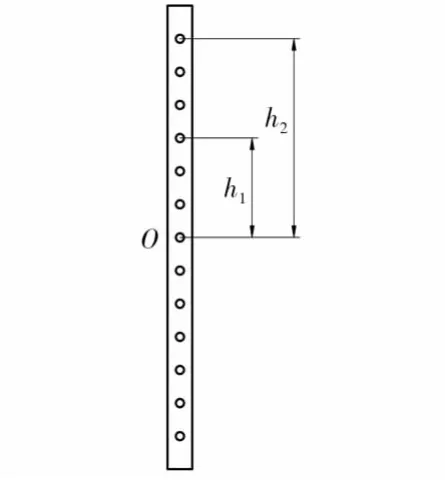
图4 利用方案三测量重力加速度示意图
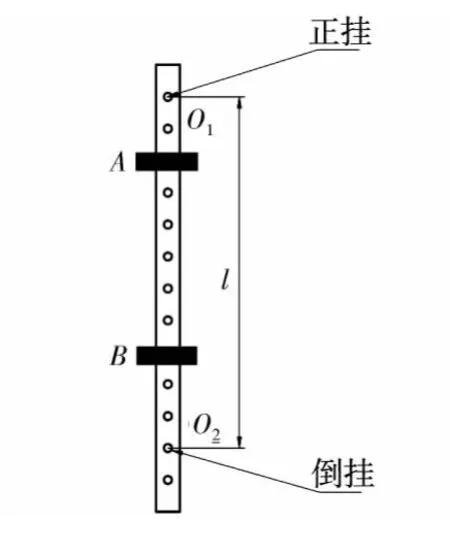
图5 利用摆锤测量重力加速度示意图
如图4所示,分别将与摆中心相距h1和h2的孔悬挂在编码器轴上,使得h2=2h1,并测量出它们的周期 T1、T2,带入公式(3)可求得重力加速度[2]。

取 h1=12 cm,h2=24 cm,对应的周期T1=0.1678 s,T2=0.3419 s。由公式(3)得 g=9.798 m/s2。
2.4 利用摆锤测量重力加速度
如图5所示,测出复摆正挂与倒挂时相等的周期值T和l,就可算出当地的重力加速度之值。

式中:l为二刀刃间的距离。在适当调节摆锤A、B的位置之后,可使T1=T2,令此时的周期值为T,O1O2间的距离即为l。
通过实验,可得 T1=T2=1.166 s,l=34 cm,再由式(4)可得 g=9.8 m/s2。
2.5 测量摆杆与物体(配重)的转动惯量
如图6所示,为测量转动惯量示意图。当复摆绕固定轴O转动,则复摆的转动惯量为I0,它满足公式(5)[5]

式中:质心到转轴的距离为 h0,对应的周期为T0。
设待测物体的质量为mx,回转半径为R,则绕自身质心的转动惯量为Ix0=mxR2,绕O转动时的转动惯量为 Ix,则有[5]

当待测物体与复摆质心重合,即x=0时,让待测物体绕 O 转动,由[5],则有

式中:M=m0+mx
测出周期T,利用公式(6)、(7),可求得待测物体的转动惯量Ix和Ix0。
取 h0=24 cm,T=1.194 s,由式(5)得复摆的绕固定轴为O转动时的转动惯量为:I0=1.073×10-2kg·m2;由式(7)可得物体绕O转动时的转动惯量Ix=5.776 ×10-4kg·m2;再由式(6)可得Ix0=1.308 × 10-4kg·m2。
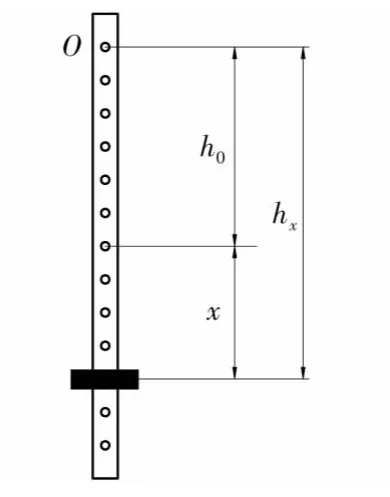
图6 测量转动惯量示意图
2.6 验证平行轴定理
令 h1=0.02 m,根据[11]

其中:y=T2h - T21h1,x=h2- h21。
可知若y与x的线性相关系数为r≈1,则可验证平行轴定理。
根据实验数据,在Matlab中利用最小二乘法得到如图7所示的y与x的拟合直线,并求得相关系数r=0.999 5。故平行轴定理得到验证。
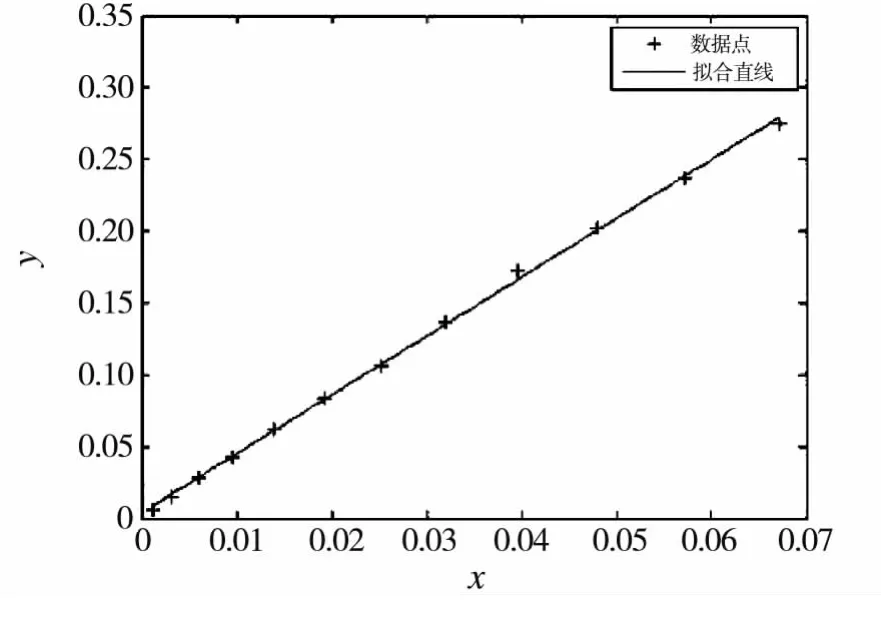
图7 利用最小二乘法的y-x的拟合直线
3 结 论
(1)基于编码器对摆动周期进行测量,精度高,误差小;将普通复摆的多孔摆杆与配重结合起来,完成了多个实验的计算及验证,结构设计巧妙经济。
(2)通过多种方法较准确地测量出了当地的重力加速度,摆杆和配重的转动惯量,也较好地验证了平行轴定理。
(3)存在误差原因有复摆的加工精度不足;单片机测量数据的精度不足;人为误差等。
[1]张立.大学物理实验[M].上海:上海交通大学出版社,1986:78-80.
[2]代伟.复摆实验装置研究[J].实验技术与管理,2007,24(6):55-58.
[3]代伟,谢春茂,陈太红.J-LD23型复摆实验装置的改进[J].物理实验,2008,28(2):23-25.
[4]陈思佳,张文霞,杨启凤等.线性回归法和Matlab在复摆测重力加速度实验中的应用[J].物理实验,2009,29(1):44-46.
[5]袁昌盛,宋笔锋.改进复摆法测量转动惯量的方法和设备研究[J].中国机械工程,2006,17(6):598-600.
[6]侯文,郑宾,杨瑞峰.基于复摆运动相平面分析的转动惯量测量新方法[J].应用基础与工程科学学报.2003,11(3):323-328.
[7]何仲.复摆法测量圆环转动惯量[J].琼州大学学报.2002,9(2):38-39.
[8]丁峰.复杂形状刚性构件转动惯量的测算[J].轻工机械.2007,25(1):75-77.
[9]刘守法.改进的复摆法测复杂零件转动惯量及仿真分析[J].煤矿机械.2009,30(12):53-55.
[10]徐军华,徐兰珍,王树林.刚体转动惯量的一种新型测量法——复摆法[J].西安邮电学院学报,2004,9(3):92-94.
[11]刘竹琴,魏宁,贾君茹.平行轴定理的验证[J].延安大学学报:自然科学版,2002,21(1):43-44.
[12]丁琪,史德俐,芦立娟.智能传感器在大学生物理实验中的应用[J].大学物理实验,2012,25(3):75-79.
[13]文明,洪延姬,王俊花等.增量式旋转编码器在复摆法冲量测量中的应用[J].仪器仪表学报,2007,28(1):140-144.
猜你喜欢
中国计量大学学报(2023年3期)2023-11-01 08:33:46
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
现代机械(2018年5期)2018-11-13 10:06:16
中国测试(2016年11期)2016-04-01 03:53:04
振动、测试与诊断(2014年4期)2014-03-01 01:14:01
中国重型装备(2010年1期)2010-11-29 11:30:10
