
四足机器人腿部结构运动学分析与仿真
2014-12-24 08:58李栓成孔瑞祥李明喜秦万军
军事交通学院学报 2014年8期
李栓成,孔瑞祥,李明喜,秦万军
(1.军事交通学院 军用车辆系,天津300161;2.军事交通学院 研究生管理大队,天津300161)
机器人的工作环境复杂,对机器人的运动灵活性和适应性提出了很高的要求,为了提高机器人的工作能力,其对于复杂道路环境必须有较强的适应能力[1]。对于腿部的机械部分来说,运动的灵活取决于足部能达到的运动范围。由于机器人的首要任务是在有障碍和轮式车辆无法到达的地方工作,因此机器人足端工作空间的扩展至关重要。
1 腿部结构模型的建立
军用四足机器人腿部模型,目前主要是四自由度和三自由度2 种腿部结构。四自由度腿部结构如图1 所示。该结构的特征是四足机器人的单腿具备4 个可控自由度,有4 个主要部件:足部、小腿、大腿和髋,通过4 个关节连接在一起。该腿部结构无联动机构,全部由伸缩式液压缸驱动[2]。它的优点在于结构紧凑,足端工作空间大,运动灵活。而不足之处是在腿的主运动平面内,大小腿的运动之间存在耦合,使得运动的协调控制比较复杂;同时,腿部的折叠运动在一个平面内,机器人在卧倒时的高度过高,跌倒时,由于腿部不能完全收回,不具备起立功能。军用四足机器人需要具有极强的环境适应性,来自外界的冲击可能作用在竖直方向,也可能是横向的,这就要求腿部结构选择时必须考虑机器人的蹲起和跌倒后自行起立的能力。显然,四自由度腿部结构不能满足军用四足机器人的工作环境要求。
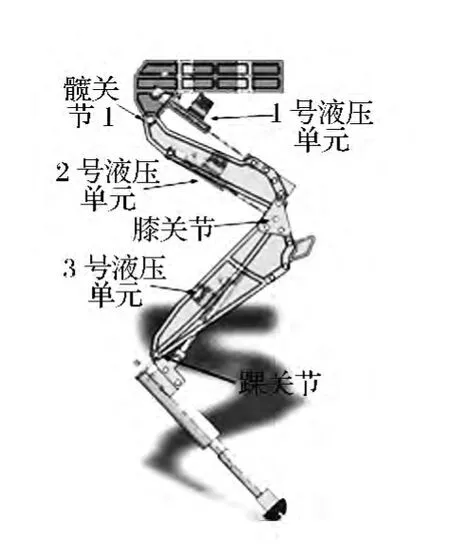
图1 四自由度单腿结构
本文所讨论的是有联动机构的三自由度步行机器人腿部结构,包括1 个液压单元所控制的膝关节自由度,1 个由电机控制的大腿自由度以及1个由液压单元控制的髋部横向摆动自由度。通过建模软件Solidworks 建立的三自由度机器人整体结构简图(如图2 所示),其腿部结构如图3 所示。

图2 三自由度机器人模型

图3 三自由度机器人腿部结构模型
2 腿部结构运动学分析
在三自由度机器人整体结构的设计上,首先要对机器人整体向前移动进行分析,髋部的横向摆动只有在受到横向冲击时才发生,因此不考虑髋部的横向控制部分。而大腿部分采用的是电机驱动,此设计可以使大腿绕轴线旋转360°。在机器人腿部结构设计、步态规划或液压系统设计的研究过程中,都需要建立足端运动和大腿液压缸之间的运动关系。因此,在对腿部进行运动学分析时,主要是研究足端摆动范围与大腿液压缸伸长之间的关系。
首先对腿部的运动提出要求,假设对腿部的要求为足端的转动范围、速度以及加速度。设计中先确定小腿长度,就可将设计要求转化为足端的转动范围、平均角速度以及角加速度,即在设计中,足端的转角范围、腿部的角速度和角加速度为已知。为了使腿部机构的运动能够达到最大的空间,将小腿的驱动机构简化(如图4 所示)。

图4 小腿驱动机构简化模型
图中:A为小腿与大腿间关节点;BC为液压缸;CE为杠杆;D点为杠杆支撑点;EF是传导力机构。A、B、D三点在大腿上的位置是固定的。
当BC段液压缸作用时,BC长度发生变化引起杠杆作用,这里的运动分析是极容易实现的,暂时不考虑液压缸所构成的△CBD部分。因此,将驱动机构进一步简化为标准的四连杆机构(如图5所示)。

图5 小腿驱动机构原理
此时以D为原点、DA方向为x轴正方向、垂直向上为y轴正方向建立坐标系,并将各构件表示为杆矢量。可知,FA与x轴的正方向的夹角θ3为小腿转动的角度,因此θ3角度的大小直接影响着小腿足端的转动范围,即足部的运动空间。在此,每个杆的角度都是其与x轴的夹角,正方向为逆时针方向。这样,对于足端的工作空间分析就转化为FA与x轴的正方向的夹角θ3的转角大小。
通过复数矢量法[3]进行位置分析,求解θ3。设已知原动件DE为l1,其与x轴正方向的夹角为θ1,导力杆EF为l2,其与x轴正方向夹角为θ2,杆FA为l3,其与x轴的正方向的夹角为θ3,DA为l4。将机构封闭矢量方程式表示为复数矢量形式可得

应用欧拉公式eiθ= cos θ + isin θ,将式(1)的实部与虚部分离,可得

由此方程组可以求得2 个位置的方位角θ2和θ3。将式(2)两分式左端含θ1的项移到等式右端,然后分别将两端平方并相加,可得

经过整理并化简后可得

式中:

求解式(4)可得

式中:l4为大腿的长度;EF杆连接前后2 个杆并传导力来驱动小腿摆动,其长度为l2。
从式(5)中可以看出,当各个杆件长度为一定值时,θ3和θ1之间的关系是固定的。对于θ1(即∠CDB的补角),通过分析液压缸所在的△BCD部分来求得,分析简图如图6 所示。

图6 液压缸作用区域
图中,虚线部分为液压缸处于最大行程位置时的示意图,设液压缸基本长度为L,伸长量为l,即BC长度为L,BG长度为L+l。通过图4 可知,CD杆是杠杆的施力部分,在液压缸伸长量不变的情况下,其长度越短,C端的作用范围越大。对于液压缸的安装位置B,可以通过选取的液压缸及与其相配合的CD杠杆长度进行分析。CD长度可通过动力学分析选取,以适应液压缸的运动,并发出最大的动力,动力大小取决于∠BCD的大小,该角越大,动力传输效率越高。设CD能满足强度要求的最小长度为a,所选取的BD长度为b。通过解三角形可得

已知θ1min为∠CDB的补角,在△BCD中可以根据余弦定理求得∠CDB,即

因此,可以求得θ1min。在△BGD中,∠BDG的角度为

通过分析可知,∠CDB出现在液压缸尚未伸长时,原动件摆角θ1= θ1min,小腿摆动角度达到最小值,此时,摆角θ3为θ1min的补角;∠BDG出现在液压缸完全伸长状态时,原动件摆角θ1=θ1max,此时,小腿达到最大摆动空间,摆角θ3为θ1max的补角。因此,θ3处于2 个极限位置时,θ1的值分别为θ1min和θ1max。将2 个θ1的极限值带入式(6)中,可解出在大腿液压缸作用下小腿的摆动空间范围。此外,当足端转角和大腿液压缸伸长之间关系建立时,可求得液压缸伸长量和伸缩速度等重要参数,为以后的液压设计提供理论基础。
3 腿部的仿真分析
大腿部分由2 块冲压钢板经连接块铆接成型,主要作用是承载整机重量,中间的空间用于布置液压驱动油缸和等臂摆动杠杆。上端与髋以铰链连接,下端以铰链连接小腿,由油缸和马达驱动大腿绕髋关节旋转,实现抬腿和迈步[4],其结构如图3 所示。该腿部组成元件中取消了足部连杆,使足部运动空间范围受到限制,故通过设计联动机构使大腿和小腿可以一起运动,从而增加足部的运动范围[5],当髋部驱动马达不转动时,髋部连杆固定,大腿油缸推动等臂摆动杠杆转动,下端通过小腿连杆连接小腿摆动,同时等臂摆动杠杆通过连接在髋上的连杆推动大腿摆动。通过使用仿真软件Adams 进行腿部建模仿真,结果如图7、8 所示。仿真曲线反映出在液压缸行程相同的情况下,能够实现大腿部件的摆动。

图7 腿部无联动机构摆动角度曲线

图8 腿部有联动机构摆动角度曲线
该机构设计的目的一方面有利于提高腿部运动的速度,降低控制难度[6],另一方面降低髋部马达驱动的行程,提高响应速度。同时可使整条腿部摆动到腹部平面以上,满足机体跌倒起立的要求。这是单腿三自由度优于其他腿部结构的功能之一。
4 结 语
本文简要介绍了三自由度腿部机器人的单腿结构,通过简化腿部的驱动部分,利用矢量方程图解法对机器人小腿进行了运动学分析,建立了腿部膝关节转角和大腿液压缸运动关系。同时,通过仿真,分析机器人腿部联动机构的合理性。本文所提出的计算过程将对下一步机器人单腿机构和支腿液压系统的设计打下良好的基础。
[1] 李赫,张文志,李伟娟,等.四足步行机器人稳定性及步态研究[J].机械制造,2009,47(6):16-18.
[2] Nelson C,Blankespoor K,Raibert M. Walking bigdog:insights and challenges from legged robotics[J]. Journal of Biomechanics,2006(3):39.
[3] 孙桓,陈作模,葛文杰.机械原理[M].7 版. 北京:高等教育出版社,2006:30-37.
[4] 陈学东,孙诩,贾文川. 多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2006:9-113.
[5] 荣学文. SCalf 液压驱动四足机器人的机构设计与分析[D].济南:山东大学,2013:77-85.
[6] Claudio S. HyQ-design and development of a hydraulically actuated quadruped robot[D]. Italy:Italian Institute of Technology,2012:25-26.
猜你喜欢
玩具世界(2022年2期)2022-06-15
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
中国临床医学影像杂志(2019年6期)2019-08-27
伴侣(2016年8期)2016-08-11
恋爱婚姻家庭(2015年27期)2015-12-19
红领巾·萌芽(2015年5期)2015-06-16
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
少年科学(2015年4期)2015-05-07
专用汽车(2014年1期)2014-12-10
