
基于BP 神经网络的汽车液压助力转向系统故障诊断仿真
2014-12-24 08:57朱诗顺欧阳熙朱道伟骆素君
军事交通学院学报 2014年8期
朱诗顺,欧阳熙,朱道伟,骆素君
(1.军事交通学院 军用车辆系,天津300161;2.军事交通学院 研究生管理大队,天津300161;3.军事交通学院 军事物流系,天津300161)
由于液压系统故障的隐蔽性、随机性和交错性,当系统发生故障时,难以及时对故障点进行准确定位。在对液压系统故障诊断的研究中发现,利用BP 神经网络对液压系统进行故障诊断,可避开模式识别中建模和特征提取的麻烦,较好地克服单纯依靠维修人员经验判别故障的缺点,使故障状态易于识别。苏欣平等[1]在液压马达故障诊断中,以转速下降等5 种故障现象作为BP 神经网络输入,以马达内部柱塞与缸的配合不良等5 种故障原因的隶属度作为BP 神经网络输出。但是,此方法存在模糊概念难以准确表达、隶属函数的生成费时费力等问题,且此方法难以对液压系统进行实时的故障诊断。曹凤才等[2]以油缸内泄漏等8 种故障原因作为网络输入,正常、轻度故障、故障、重度故障作为网络输出。但是,汽车液压转向系统各零件相对封闭,不能实现对具体故障点的识别和诊断。鉴于此,本文提出一种利用压力、流量等实时状态信息作为输入,各具体故障模式作为输出的BP 神经网络液压故障诊断方法,实现对汽车液压助力转向系统故障快捷诊断。
1 AMESim 液压系统故障仿真
在汽车液压助力转向系统故障实际研究中,由于故障样本数据相对缺乏,需要在装备上进行故障模拟,但在技术实现上比较困难。运用AMESim 仿真软件对液压系统进行故障仿真建模,在各种故障模式下获得对应的系统故障样本实时数据,可为获取BP 神经网络故障诊断的训练样本和测试样本奠定基础。
1.1 汽车液压助力转向系统AMESim 仿真模型的建立
利用AMESim 构建的汽车液压助力转向系统包括方向盘、扭杆、齿轮齿条、储油箱、液压泵、电动机、转向阀、液压缸和液压管路等构件。液压泵在电动机的作用下,将储油罐中的液压油高压泵入系统中,转化成液压能。当方向盘输出转动角度时,扭杆转动,从而给转向阀转动信号,转向阀打开,允许液压油进入液压缸,此时液压油的压力与转向阀阀门的开度成正比。液压油压力作用在活塞上,产生与压力成正比的动力。这个动力通过活塞以及与之相连的机械构件(如齿条)传递到车轮,实现助力转向。汽车液压助力转向系统AMESim 模型如图1 所示。

图1 汽车液压助力转向系统AMESim 模型
1.2 汽车液压助力转向系统AMESim 模型的故障注入
通过仿真模型参数的修改,对液压助力转向系统的故障模式进行仿真,可以方便地考察各种故障现象所对应的参数状态及其对液压助力转向系统的影响。
(1)溢流阀弹簧松动。溢流阀弹簧松动将导致溢流阀开启压力降低,即未达到系统工作压力时,溢流阀便开启泄压,图1 中“4”为溢流阀模块。
溢流阀的开闭取决于系统压力与溢流阀开启压力的差值dp:

式中:pin为入口处压力;pout为出口处压力;pcract为开启压力。
pcract的大小可在模型属性中修改。当dp为正时,溢流阀开启;当dp为负时,溢流阀关闭。所以,通过修改模型中溢流阀元件的“开启压力”属性,可仿真溢流阀弹簧松动故障模式。
(2)液压泵转速不足。通过修改模型中液压泵元件的“液压泵转速”属性,可模拟液压泵转速不足故障模式。
(3)液压缸内泄漏。液压缸内泄漏指工作缸与非工作缸之间存在泄漏,使得液压油在压力的作用下从工作缸流向非工作缸,图1 中“7”为液压缸模块。在此模块中,液压缸内泄漏流量Qleak为

式中:p1为工作缸入口压力;p2为非工作缸入口压力;lleak为内泄漏率,L/min/MPa。
lleak的大小可在模型属性中修改,即通过修改模型中液压缸元件的“泄漏率”属性,来模拟液压缸内泄露故障模式。
(4)系统外泄漏。系统外泄漏指的是液压油从元件或管路中流到外部。在模型中加入固定节流孔,图1 中“5”为节流孔模块。可通过修改流量控制阀模块的“等效口径”属性,来控制液压油通过液流孔的流量,从而模拟系统外泄漏故障模式[3]。
(5)系统超量进气。当系统超量进气时,液压油的体积弹性模量将大大减小,液压油的可压缩性将显著提高,并将严重影响液压系统的工作性能。所以,通过大幅修改油液属性中“体积模量”的大小,来模拟系统超量进气故障模式。
2 基于改进BP 神经网络的液压故障诊断
神经网络工具箱不仅包括常规BP 神经网络,还包括各种常用的神经网络改进算法。其中,自适应学习率调整、附加动量的梯度下降法、共轭梯度法、L-M 等4 种方法比较见表1[4]。

表1 MATLAB 中几种改进BP 算法比较
针对液压故障诊断的具体情况,可设计合适的改进BP 神经网络模型,并将仿真得到的数据作为输入信息,利用该BP 神经网络模型对汽车液压助力转向系统进行故障诊断。
2.1 液压故障诊断的BP 模型设计
将AMESim 汽车液压助力转向模型中各个故障模式下采集的数据作为输入信息,分别为液压阀P 口流量、液压阀P 口压力、液压阀T 口流量、液压阀T 口压力、液压缸左缸流量、液压缸左缸压力、液压缸右缸流量、液压缸右缸压力、液压泵流量、液压泵压力,它们向量为X=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10]。将在AMESim 仿真模型中注入的溢流阀弹簧松动、液压泵转速不足、液压缸内泄露、系统外泄漏、系统超量进气5 种故障模式以及正常模式作为输出信息,它们向量为Y =[y1,y2,y3,y4,y5,y6]。
由于在仿真模型中采集了10 个点的状态信息,所以输入层的神经元数为10。为了简化网络结构,输出层使用3 个神经元,溢流阀弹簧松动、液压泵转速不足、液压缸内泄露、系统外泄漏、系统超量进气、正常模式分别表示为(0,0,0),(0,0,1),(0,1,0),(0,1,1),(1,0,0),(1,0,1)。
输入层到隐层的传递函数选为tansig,隐层到输出层的传递函数选为purelin,根据经验结合实验,选取隐层节点数为13。在算法改进的选择上,当选用L-M 改进算法时,此神经网络收敛速度最快,训练精度最高,所以,训练函数用trainlm。
2.2 网络训练及测试
根据1.2 中的故障注入,按照故障程度由轻到重,在AMESim 汽车液压助力转向系统中设置不同的参数,对5 种故障模式各采集7 组不同状态数据,将其中4 组作为BP 神经网络的训练样本,另外3 组数据作为测试样本。训练样本和测试样本分别见表2 和表3。

表2 BP 神经网络训练样本
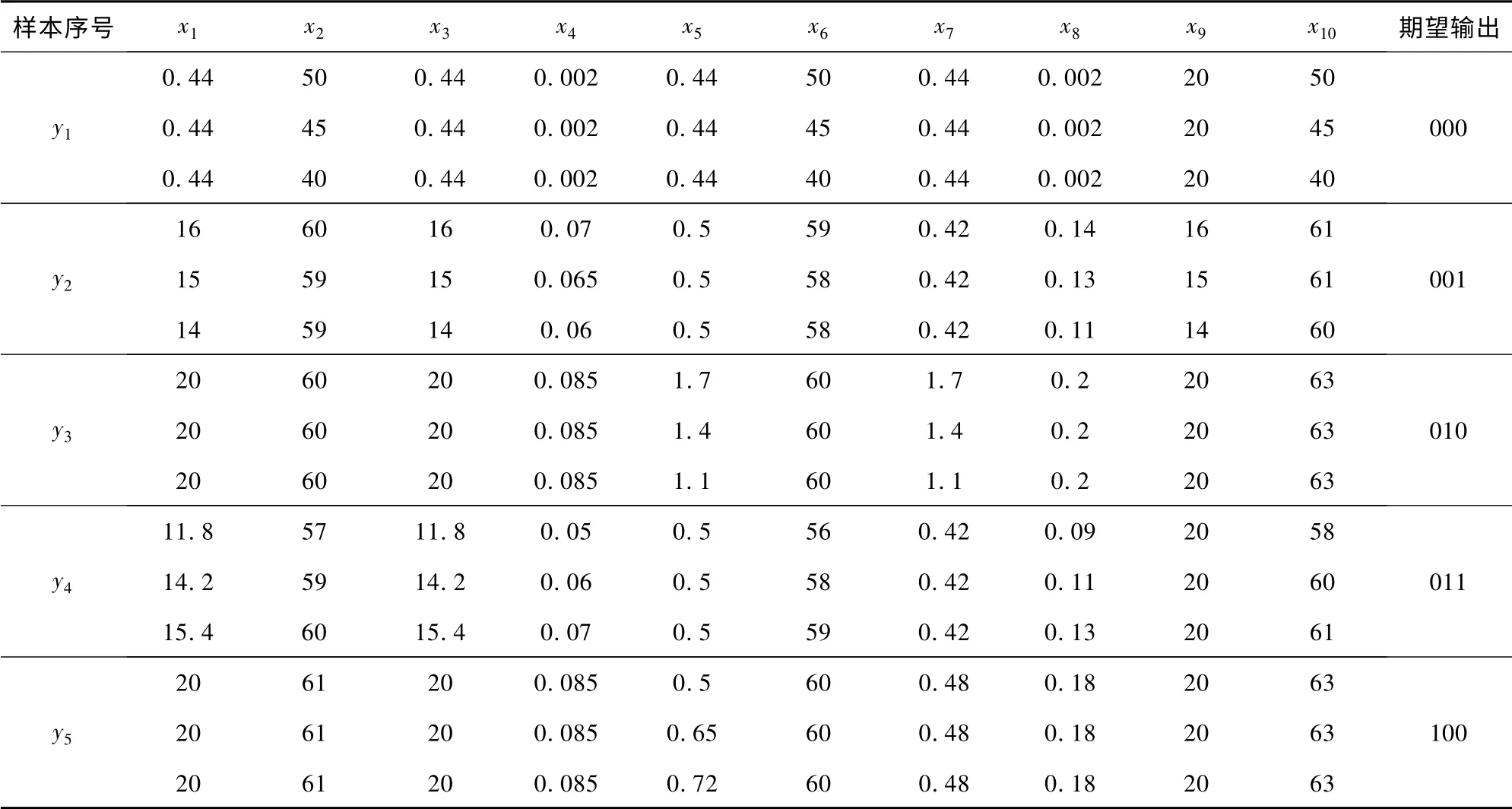
表3 BP 神经网络测试样本
经过42 次训练满足误差要求,达到训练目标。神经网络训练完成后,进行测试的期望输出,其结果见表4,测试样本的诊断结果见表5,网络训练梯度如图2 所示。
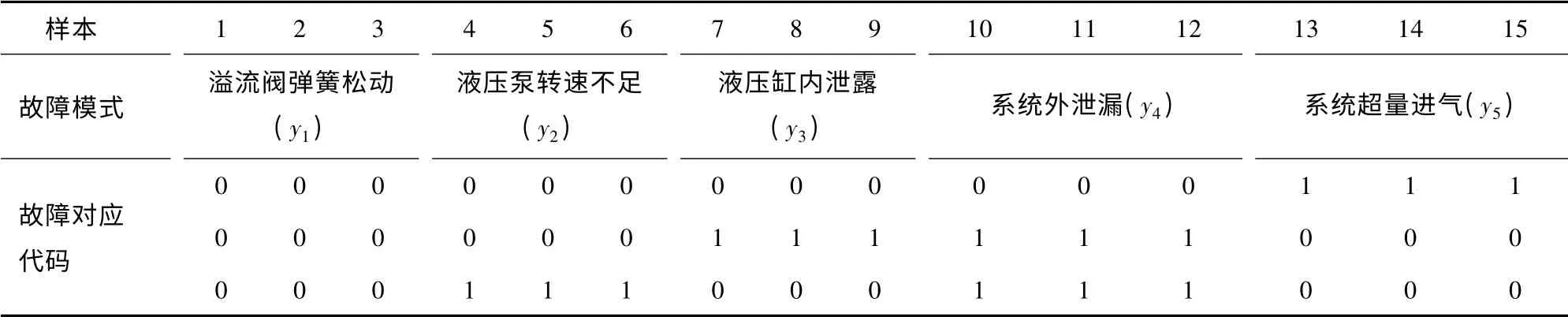
表4 测试样本期望输出及对应的故障模式
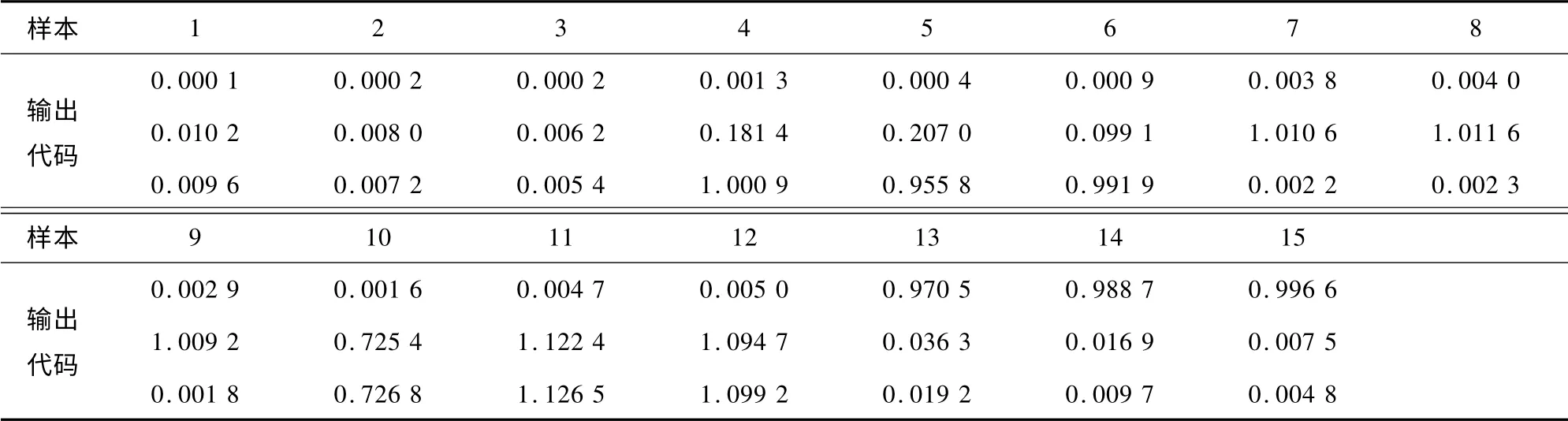
表5 测试样本诊断结果

图2 网络训练梯度图
表5 为测试样本的诊断结果,即15 组测试样本对应的诊断结果的代码。如果诊断准确,则测试样本诊断结果的代码将与期望输出的代码相吻合。将15 组测试样本诊断结果的代码(表5)与期望输出的代码(表4)对比,诊断结果平均相对误差为0.512 4%。测试结果表明,此实时状态信息作为输入的改进BP 神经网络对液压故障的诊断是准确的。
3 结 论
(1)将压力、流量等实时状态信息作为网络输入,具体的故障点判断作为网络输出的改进的BP神经网络,能够实现对汽车液压助力转向系统的故障诊断。仿真表明,诊断比较准确,平均相对误差为0.512 4%。
(2)利用AMESim 仿真软件建立仿真模型对汽车液压助力转向系统的各故障模式进行仿真,得到相对应的状态信息,用作BP 神经网络的输入信息,对解决液压助力转向系统在实际故障样本数据难以获得、相对缺乏的问题上有参考意义。
[1] 苏欣平,解亚,周鑫,等.基于BP 神经网络的液压马达故障诊断[J].中国工程机械学报,2010,10(2):288-231.
[2] 曹凤才,岳凤英.基于BP 神经网络的液压系统故障诊断研究[J].中北大学学报:自然科学版,2010(31):596-599.
[3] 汪宇亮. 基于AMESim 工程机械液压系统故障仿真研究[D].武汉:武汉理工大学,2012.
[4] 周黄斌,周永华,朱丽娟. 基于MATLAB 的改进BP 神经网络的实现与比较[J].计算机技术与自动化,2008,27(11):28-31.
猜你喜欢
低温与特气(2022年2期)2022-11-26
汽车实用技术(2022年14期)2022-07-30
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
中国军转民(2021年11期)2021-12-13
兰州理工大学学报(2021年1期)2021-03-09
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
科技风(2018年6期)2018-10-21
汽车与新动力(2015年1期)2015-02-27
