
港口岸桥用直流电机非独立控制励磁调速系统设计
2014-12-18 11:19王毅朱德平步长存
中国港湾建设 2014年9期
王毅,朱德平,步长存
(1.山东科技大学,山东 青岛 266590;2.青岛港前湾集装箱码头有限责任公司,山东 青岛 266500;3.山东东山新驿煤矿有限公司,山东 济宁 272000)
0 引言
岸边桥式起重机(简称岸桥)是港口岸边从事集装箱装卸生产的重要设备,它主要由门架、桥架(俯仰)和起重小车组成[1-2],其中俯仰和小车能否正常高效运行直接决定了生产效率。上海振华重工集团有限公司制造的J15型集装箱岸桥,机械自重800 t,额定起重量为40.5 t,起升高度32 m,其俯仰和小车的电控系统均采用GE SERIESSIX PLC控制和DC-300驱动,随着控制器件的更新换代该电气控制系统已停产,在用电控系统面临着元件老化,故障率高,无法购买备件等问题。如果不进行升级改造,整台岸桥将被弃之不用,造成企业的成本和资源浪费。
从改造工期,备件管理及现场技术等方面考虑[3],选用西门子6RA70型驱动器替换DC300完成对小车与俯仰电机的“一拖二”交替驱动设计,采用GE9030型控制器替代SERIESSIX PLC,如图1所示为小车与俯仰机构的电气控制系统原理,GE9030控制器IC693 CPU350与CPU374之间为Genius通讯方式,主控制器CPU374与西门子6RA70之间采用Profibus通讯方式。

图1 小车与俯仰机构电气控制系统原理图Fig.1 Electrical control system principle of the Trolley and Boom
1 驱动器选型
1.1 6RA70驱动器选型
本文驱动器所驱动的小车和俯仰的电机均为ZZJ-814型,其铭牌数据:输入电压480 V,功率112 kW,电枢额定电流280 A,电枢额定电压440 VDC,转速500 r/min;励磁方式为他励,励磁电压 220 VDC,励磁电流 9.2 A,转动惯量 0.75 kg·m2,最大过载系数2。
6RA70驱动器选型主要考虑3个因素:负载的额定电源电压、额定电枢电流和运行方式。由于小车和俯仰运行方式为四相限运行,同时考虑到起重机电源电压波动较大,有时能超过10%,因此驱动器的电压等级选择500 V级,初步选型为6RA70XX-6GV62-Z,驱动器容量XX由驱动器的额定电流决定,其额定参数如表1所示。
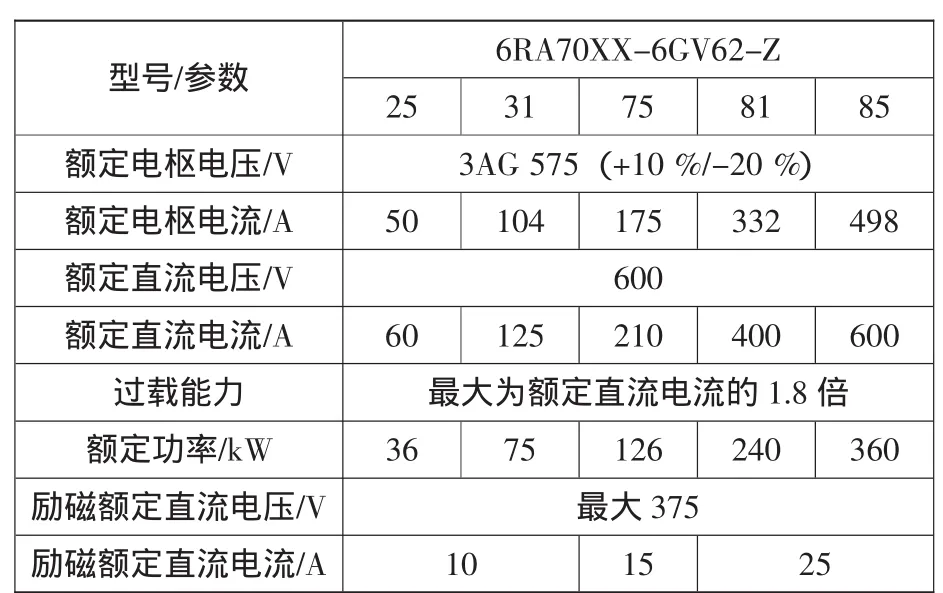
表1 6RA70额定参数表Table 1 Nominal parameter of 6RA70
驱动器容量(电流)选型依据:1) 驱动器额定电流应大于电机电枢额定电流;2)驱动器最大过载电流应大于电机最大过载电流。
6RA70最大过载系数为1.8,电机最大过载系数为2,计算驱动器电枢电流为

驱动器容量选择XX=81或85,考虑驱动电机线圈老化造成电机绝缘等级下降,以及岸桥频繁启动、制动、过载的工作特点,驱动器容量选择XX=85。
Z表示驱动器待选件,6RA70与9030实现PROFIBUS通讯,须在6RA70上安装通讯板CBP2(选件G95),安装通讯板CBP2须安装总线适配器(选件K11)和适配板(选件K01)。
综上所述,该驱动器选型为:

1.2 6RA70驱动器型号校验
1) 6RA7085-6GV62 特性
6RA7085-6GV62驱动器负载连续工作电流为600 A,额定过载系数X=1.2,其特性计算为
峰值电流:Ipeak驱动=1.2×600=720 A
带载能力:Iload驱动=0.8×600=480 A
2) 小车/俯仰电机特性
根据电机的铭牌数据计算电机特性为
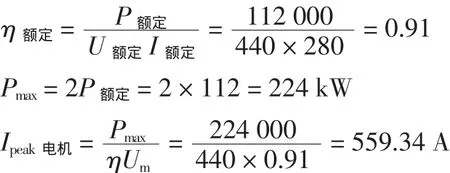
3)6RA70调速器校核标准
①I额定<Iload驱动,即280<480
②Ipeak电机<Ipeak驱动,即559.34<720综上,6RA7085-6GV62的选型成立。
1.3 GE9030控制器选型
根据小车与俯仰电气控制系统的控制功能、控制点数、信号类型,本文选用GE9030系列IC693CPU374控制器,配用电源IC693PWR321,数字量输入模块IC693MDL240(10块),数字量输出模块IC693MDL940(8块),模拟量输入输出模块IC693ALG442(1块)。
2 非独立控制励磁调速系统设计
2.1 调速指标
控制系统的调速指标要求如表2所示。
将小车与俯仰的运行速度转化为电机转速为:小车电机的控制转速490.4 r/min,俯仰电机的控制转速500.3 r/min。
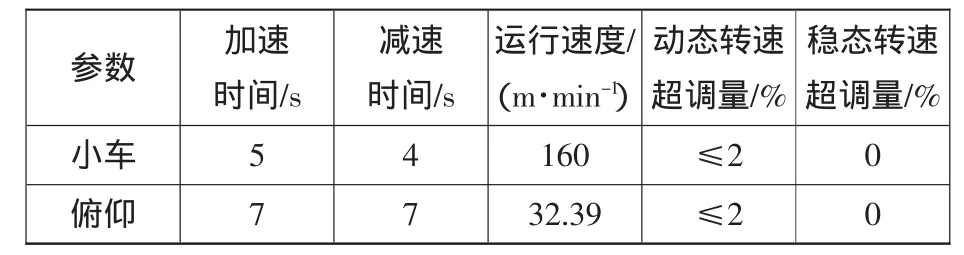
表2 调速指标Table 2 Index of speed control
2.2 直流电动机调速原理
他励直流电动机转速公式[3]为:

由公式(1) 可知,他励直流电动机可以通过调节电枢电压Ud的方式实现调速目的。
2.3 非独立控制励磁的调压调速系统设计
由于小车、俯仰没有测速装置,根据直流电机感应电动势计算公式:

如果磁场强度φ恒定,则转速与E成正比,可以采用E的反馈信号代替转速n,由于感应电动势E检测困难,根据公式(3)只需采集Ua和Ia信号即可获得实际感应电动势的大小。

为确保电机调速的动态与稳态性能指标,电枢回路采用转速、电流双闭环调速系统,励磁回路采用电动势环和磁通环的双闭环控制方式,实现恒定的磁通,图2所示为非独立控制励磁的调压调速系统[4]的原理图。通过非独立控制励磁的调压调速系统设计,能够使小车俯仰电机在基速以下保持额定励磁不变,依靠转速、电流双闭环系统调节电枢电压来控制转速,实现了满磁下的调压调速。
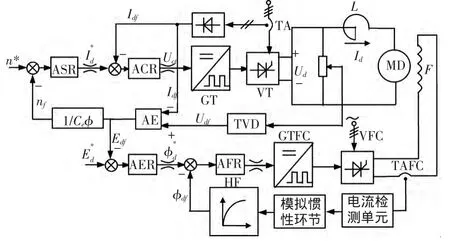
图2 非独立控制励磁的调压调速系统原理图Fig.2 Pressure and velocity control system principle ofnon-independent excitation
2.3.1 电枢控制回路设计
6RA70驱动器电枢控制回路功能设计见图3。
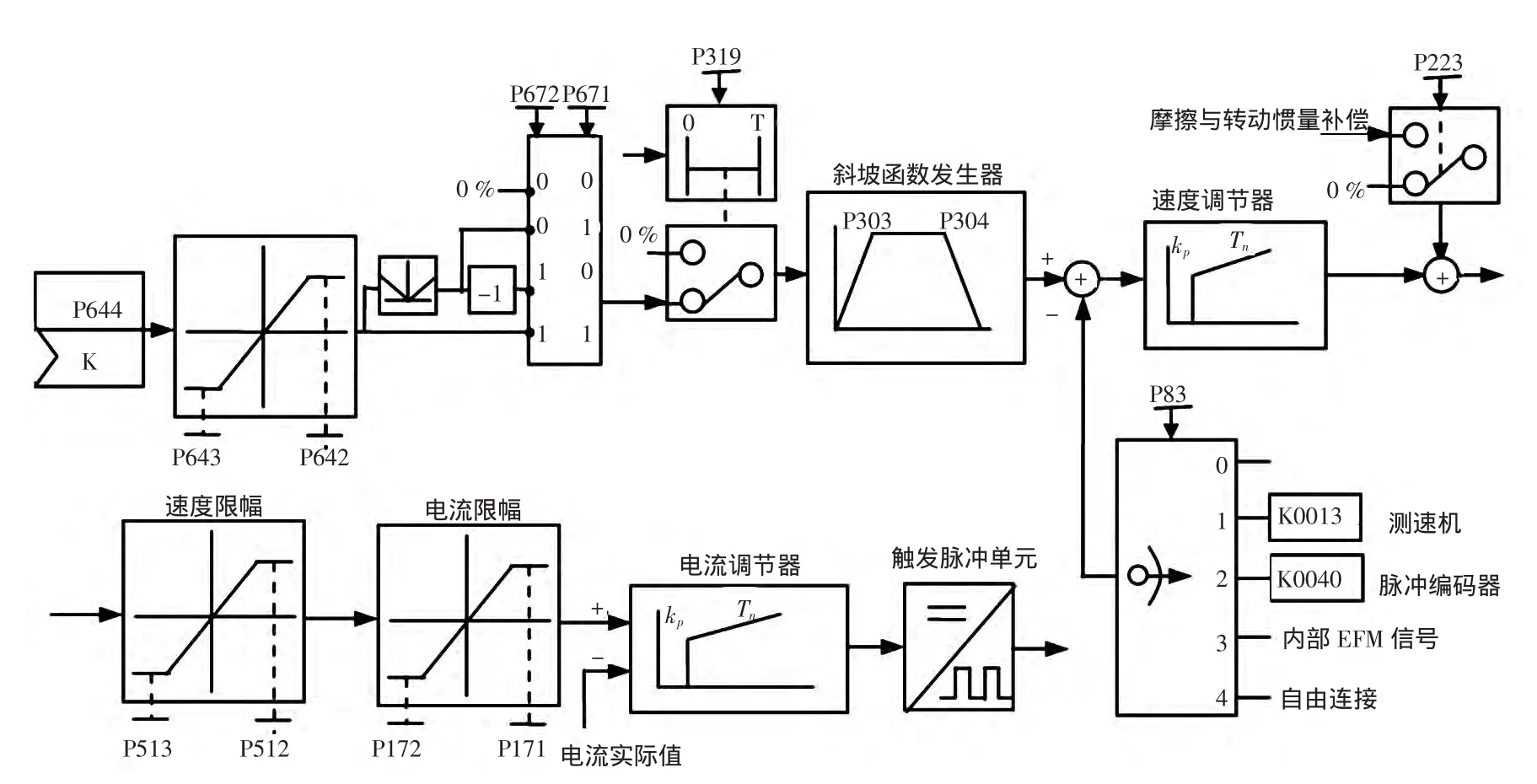
图3 电枢控制功能图Fig.3 Armaturecontrol function diagram
速度给定:速度给定是通过PLC将手柄编码器的值转换为一个整数,并通过Profibus通讯将该值(K3002)传递给6RA70的参数P644。同时把控制字 1的 11位(B3111)和 12位(B3112)赋值给P671和P672,实现对电机速度给定的正负选择。
斜坡函数发生器:将给定值变为一个随时间连续变化的电压信号,参数P303和P304决定了系统的加减速时间,根据小车加减速时间设定P303.1=5 s,P304.1=4 s;根据俯仰加减速时间设定 P303.2=7 s;P304.2=7 s。
电流调节器:ACR采用PI调节器,其中P值决定对输入响应的快速性,I值影响系统的稳态误差。小车电流调节器的PI参数由P155.1=0.21,P156.1=0.032确定;俯仰电流调节器参数由P155.2=0.22,P156.2=0.035确定。
电流限幅值:ACR的输出限幅值决定了整流器输出电压的最大值,参数设定的主要依据实际负载的过载倍数。设定小车电流限幅值P171.1=150%,P172.1=-150%;俯仰电流限幅值为P171.2=180%,P172.2=-180%。
速度调节器:ASR采用PI调节器,使实际速度跟随速度给定变化,实现稳态转速无静差。参数设定依据是电机转速无波动。本系统中P、I参数为自整定参数。实际速度反馈采用的是反电动势反馈,设定P83=3。
速度限幅值:ASR的输出限幅值决定了ACR的给定最大值,该值的大小直接影响到系统动态过程中的超调量,本系统设定P512=120%,P513=-120%。
2.3.2 磁场闭环设计
磁场电流的闭环控制主要目的就是保持磁通恒定。通过图2知将电动势给定信号定义为EdN,将AER输出限幅值设定为额定励磁电流,同时限定EMF最大反馈值Emax=96%EdN。在基速以下调速时Edf始终小于使AER一直处在饱和状态,其输出电压总保持在限幅值上,使AFR的给定值始终为额定励磁电流,通过AFR的调节其输出始终保持为额定的励磁电流不变。通过AFR调节器自动优化获得调节参数和相应的磁化曲线。
2.4 制动器抱闸功能实现
小车电机与俯仰电机的选择抱闸方式均为工作抱闸,其工作原理及控制方式相同,下面以小车电机制动器抱闸为例进行设计。设P80=2,其控制时序如图4所示。
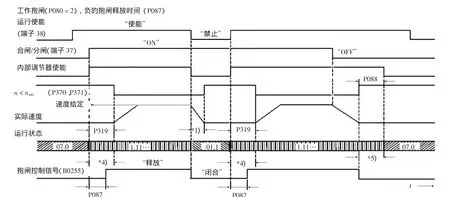
图4 抱闸控制时序图Fig.4 Brakecontrol sequence diagram
由时序图知,当37、38号端子置1后,使能调节器和触发脉冲,电机转矩建立,延时P87后,抱闸打开;当37、38号端子置0时,抱闸闭合,延时P88后,调节器封锁,转矩消失。
系统中令37、38号端子采集电机主接触检测信号作为T/B运行和使能信号。设P87=-0.3 s,表示抱闸打开前建立起力矩。设P88=1 s,表示抱闸闭合后1 s转矩消失。抱闸输出端子为48、54号端子,对应P772参数,设定P772=B255,B255为抱闸释放的控制变量。
2.5 调速器故障停机功能实现
当6RA70检测到故障后,其状态字K32的位3置1,对应的开关量连接器B106=1。设定46、47号输出端子参数P771=106,则9030PLC通过中继器采集46、47号端子状态来控制小车、俯仰机构的故障停机。
2.6 小车和俯仰控制切换功能
设定6RA70的P676为B3300,可由控制字2的首位控制小车与俯仰的控制参数组切换。
3 小车、俯仰实际运行波形分析
3.1 小车机构的典型波形图分析
所设计小车的非独立控制励磁的双闭环调压调速系统实际运行,通过Drivemonitor软件监测小车运行状态,选取小车速度给定,实际转速、电枢电流、磁场电流,EMF等作为监测变量,如图5所示为小车带载40%向后运行的监控波形。

图5 小车后向运行波形Fig.5 The backward operating waveform of Trolley
分析小车的运行性能如下:
1)系统动态性能。如图5所示的小车速度波形,分析其加速和减速过程,转速超调量≤2%,加速时间约5.3 s,减速时间约为4 s,均符合调速指标要求。小车加速阶段和减速阶段的电枢电流较大,但均未超过最大限流值。
2)系统稳态性能。如图5所示转速波形,小车向前和向后运行稳定后,实际转速与给定转速波形曲线基本重合,且无波动,稳态转速无静差。
如图5电枢电流波形,小车稳定运行后,电流波形比较光滑,无剧烈的振荡和尖峰,但波形有波动。分析其原因为,系统稳定时电机电磁转矩与负载转矩关系方程式为

在磁通φ保持不变的情况下,电枢电流与负载大小成正比,由于小车运行过程中负载不断变化,所以电枢电流波形有波动。
如图5所示励磁电流波形,磁场电流在运行过程中基本保持不变,符合本系统EMF闭环设计磁通保持不变的特征。
3.2 俯仰机构运行的典型波形图分析
将运行机构切换到俯仰双闭环调压调速系统运行,采集俯仰向上波形如图6所示。俯仰运行波形分析方法同小车相似,不同的是俯仰机构为势能性负载,其转矩计算公式为

其中:G为大梁重力;L为大梁长度;α为大梁与水平面的夹角范围为0°~80°。由公式(6) 可知:在俯仰上升过程中TL随着α增大而减小,对应Ia逐渐减小。因此,如图6所示俯仰电枢电流表现为电流波形不断下滑。

图6 俯仰上升波形Fig.6 Theup waveform of Boom
综上分析,小车/俯仰驱动器的控制方法和参数设置完全符合实际运行要求。
4 结语
新系统自2012年5月在某港口7号岸桥投入使用至今,各机构一直运行良好,故障率低,效率高,维修方便,降低了工人劳动强度,避免了因备件导致的长时间故障停机和资源浪费。
[1] 张浩星.50 t-50 m岸边集装箱起重机[J].中国港湾建设,2001(1):45-47.ZHANG Hao-xing.50 t-50 m qua side container crane[J].China Harbour Engineering,2001(1):45-47.
[2] 王细远.散货港口起重机远程监控系统的研究[J].水运工程,2008(10):187-193.WANGXi-yuan.On bulk cargo harbor crane remote monitor system exploiture disquisition[J].Port&Waterway Engineering,2008(10):187-193.
[3] 樊平.无刷直流电机宽范围调速系统研究[J].测控技术,2010,44(9):57-59.FAN Ping.Research on wide range speed regulation of BLDCM[J].Power Electronics,2010,44(9):57-59.
[4]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.CHENBo-shi.Electric drive automatic control system[M].Beijing:China Machine Press,2003.
[5]SIMOREGDCMaster 6RA70系列使用说明书[M].西门子公司,2007.Operating manual of SIMOREG DC Master 6RA70[M].Siemens,2007.
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
网络安全与数据管理(2020年4期)2020-06-04
弹箭与制导学报(2019年6期)2019-06-24
现代防御技术(2019年2期)2019-05-06
宇航计测技术(2018年3期)2018-09-08
舰船电子对抗(2018年2期)2018-06-19
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27
