
应用GE PAC的智能停车场系统的设计与实现
2014-12-14 07:08傅忠云
重庆理工大学学报(自然科学) 2014年1期
傅忠云,陈 平
(南京航空航天大学金城学院,南京 211156)
随着城市私人汽车数量的迅速增长,现今大部分停车场老旧的管理模式和落后的环境设施已无法满足人们日益增长的需求。然而大型停车场规模过大,且停车场内环境单一、相似,容易造成混淆,如果再缺乏相关的引导设施,那么车主将很难快速找到最佳停车车位,同时也给车主取车造成困难。此外,某些空闲车位因为地理位置的原因不能及时被车主发现,致使停车场的车位利用率不高,在城市车位紧张的现状下,出现车位资源闲置浪费的情况。目前,对于停车库(场)的研究较多侧重于硬件的设计,很少对停车、取车的引导进行设计[1-4]。为解决停车场管理混乱、车位利用率低、停车和取车难的问题,本文提出了一种基于可编程自动化控制器(GE PAC)的设计与实现方案。
1 智能停车场控制系统总体设计思路
系统以GE FANUC PAC系统为主控单元,通过普通I/O数据传送、以太网及串口通信等多种数据通信方式,集成车辆进出管理、车位智能引导、停车收费、车位信息查询及上位机组态监控软件等各模块,保障停车场管理者实现实时监控。系统总体结构框图如图1所示。
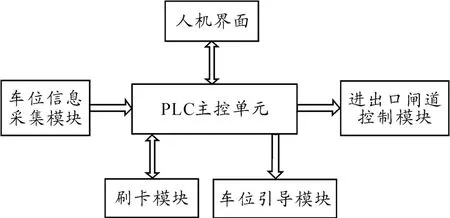
图1 系统总体结构框图
系统首先利用红外探测技术准确获取车位停车信息和车辆动态监测信息,然后将信息反馈给信息采集器,建立动态信息数据库;再由 GE FANUC公司生产的PAC Systems RX3i控制中心进行计算分析,自动做出反馈,产生引导信息,并将引导信息传给车位引导模块,由指示器引导车主泊车及取车。同时,利用专用的上位机监控软件iFix对停车场车位及车辆信息进行实时监控,从而提高了停车场车位的使用效率,使停车秩序得到优化,方便了车主泊车及取车,实现了停车场的智能管理。
2 硬件设计
本系统硬件主要由主控单元和3个子系统构成,即刷卡模块、停车场车位引导模块和闸道控制模块。
2.1 主控单元
PAC Systems RX3i控制器是创新的可编程自动化控制器PAC Systems家族中最新增加的部件,它是应用于中、高端过程控制和离散控制的新一代控制器。PAC Systems RX3i的特点是具有单一的控制引擎和通用的编程环境,提供应用程序在多种硬件平台上的可移植性和真正的各种控制选择的交叉渗透。RX3i模块在一个小型的、低成本的系统中提供了高级功能。与原有的控制系统相比,它使用双背板总线,提高了数据传送速度;采用开放的通讯方式,支持以太网和串口协议等多种通讯方式[5-8]。
本系统包含多个功能模块,这些功能模块都需要与主控单元之间进行数据传递,而PAC系统本身所具有的高可靠性又是单片机系统所不具备的,基于以上考虑,该智能停车场系统选用PAC系统作为主控单元。
2.2 刷卡模块
刷卡模块主要为停车场车辆收费管理而设计。系统利用车辆进入停车场时记录的识别信息建立唯一对应的账户,记录该车辆的停车时间、停车费用、账户余额等信息。通过上位机管理员界面还可以对停车场的会员帐户进行充值。该模块通过RS232串口协议与RX3i控制器进行数据通讯。PLC接收和发送数据通过CPU COM1口,刷卡机用RS232串口线跟COM1口连接。该模块选用的IC卡是Mifare标准IC卡,工作频率为13.56 MHz,其传输速度快,读写次数多。读IC卡读写模块是ZLG500A,车主在办卡时将信息写入卡内。卡内存储的信息主要有车主姓名、车型、停车时间和余额等。刷卡模块电路及硬件实物如图2所示[9]。
2.3 停车场车位引导模块2.3.1 车位信息采集模块
根据系统总体设计方案,系统需要实时监控停车场内各车位的空置情况。经过方案论证,最终确定采用地埋红外光电传感器模块来检测车位空置情况。由于红外光电传感器模块需要嵌入板材内,并且每个红外光电传感器模块均要接3根电线,分别是电源线、接地线、信号输出线。如果每个车位都安装红外光电传感器模块,一方面费用过高,另一方面将会出现多达数百根的电线,板材将不留任何空隙,全部被电线覆盖,非常不美观,所以最终选用14个经典车位演示出所有的引导情况。其他车位不安装传感器的默认为有车。车位信号采集模块电路原理及实物如图3所示。
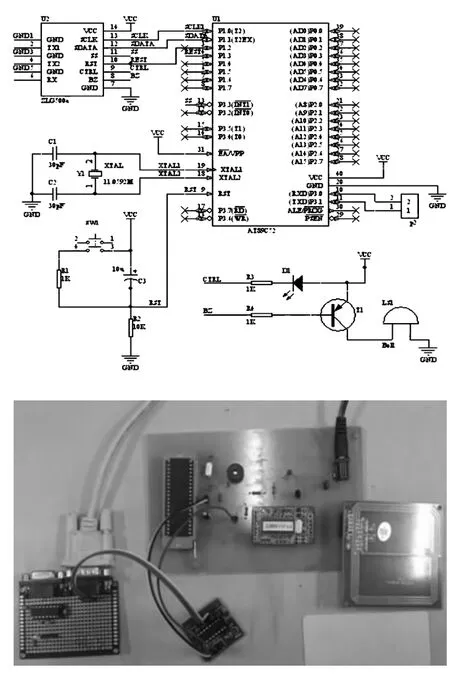
图2 刷卡模块电路及硬件实物
由于RX3i控制器采用的是24 V电平的信号传输,TCRT5000红外光电传感器模块的输出信号无法满足要求,因此需要进行电平转换,这里利用TCRT5000红外光电传感器模块的输出信号来控制继电器的方式实现。
2.3.2 引导模块
为了提高停取车效率,本智能停车场系统设计了引导显示模块。引导系统采用LED点阵屏幕显示方向为司机提供车位引导,主控单元根据车位空缺情况,通过程序寻找最优路径,发出控制信号,然后由单片机控制点阵驱动电路,最终实现点阵的实时显示[10]。点阵显示控制模块硬件电路仿真如图4所示。
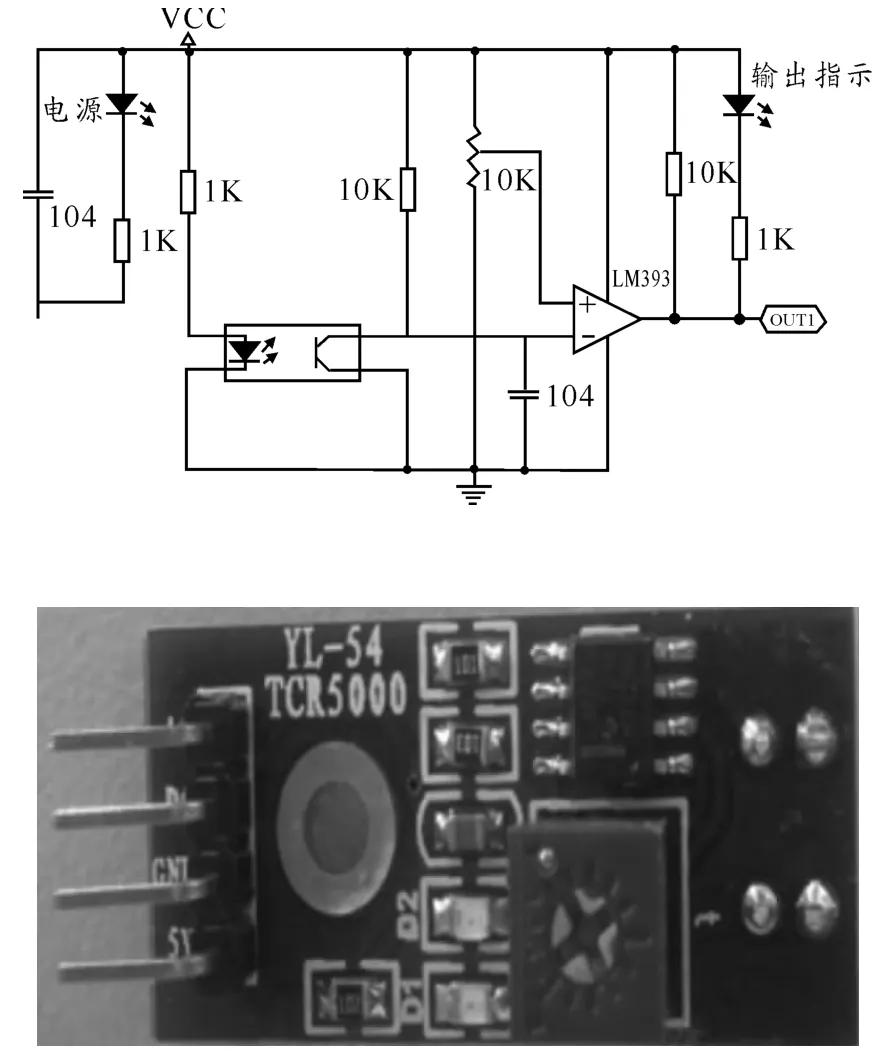
图3 车位信号采集模块电路原理及实物
前面已经提到RX3i控制器采用的是24 V电平的信号传输,而单片机的工作电压为5 V左右,因此在两者之间添加了1个电平转换模块,将PLC的24 V电平信号转换为5 V的信号再传输给单片机。由于两者之间都是直流信号,因此采用最简单的电阻分压法制作了电平转换模块。
2.4 进出口闸道控制模块
系统中停车场出入口闸道的控制采用28BYJ-48四相八拍步进电机实现。该电机驱动电压为DC5V~DC12V,刷卡后由主控单元发出指令,驱动进出口电机转动90°,5 s后复位。步进电机驱动电路原理如图5所示。
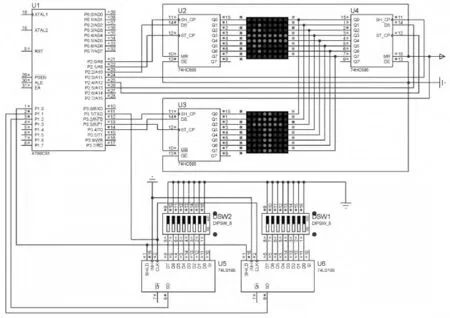
图4 引导模块硬件电路Proteus仿真
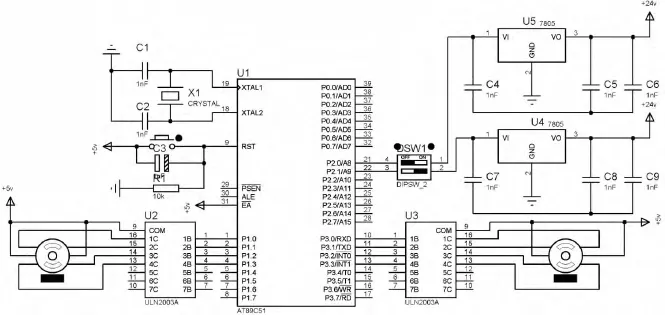
图5 步进电机驱动电路原理
3 软件设计
3.1 软件设计思想
系统软件采用分层设计的思想,分为应用层、控制层和物理层。每一层使用下层提供的服务,并向其上层提供服务。利用GE PAC系统的以太网和串口协议实现各模块之间的通信。
1)应用层
本软件的最高层。程序实现功能的逻辑转换。主要实现路径生成、查询系统、管理员界面的应用功能底层设计,其中最重要的是路径生成部分,其主要步骤有:
①扫描所有车位,找到最近的闲置车位,将其作为目标车位;
②采用分区域方式确定引导路径的前半部分;
③将目标车位和路径上点阵显示器的物理坐标做比较,得到后半部分完整引导路径;
④将路径信息发往控制层,并向下层发送服务请求,实现硬件显示引导路径。
2)控制层
接受应用层发来的服务请求,从软件上为物理层产生控制信号。其中客户的账户计费、充值、查询系统为重点。对账户信息采用数组的方式来实现存储,涵盖了账户的停车时间、停车费用、余额以及登陆密码等信息。其中,停车时间和费用是对用户停车时间的累计及根据价格水平计算出的金额。
控制层提供有口令保护的管理员账户后台入口,可以实现对价格水平的调整、对整个停车场的宏观调度,以及对用户的账户充值等服务。控制层功能贴近现实,实用性强。
3)物理层(驱动层)
软件的底层与硬件电路相连接,主要实现采集上层的服务信息,对硬件产生响应的驱动信号,实现由软件到硬件的信息转化等功能。
采用AT89C52单片机作为下位机,对硬件进行信息的串并行转换,并实现底层点阵显示器的动态扫描,大大减少了线路数量,增加了可靠传输距离。编写的PLC上位机物理层程序将PLC处理后的上层信息转化为电平信号,经过底层光电耦合器实现电平转换和物理隔离,然后发送给单片机处理,驱动硬件显示,实现完整功能。
3.2 通讯连接
3.2.1 以太网通讯
PAC系统编程软件PME(proficy machine edition)界面、iFix上位机监控界面与RX3i控制器之间通过以太网实现通讯。需要注意的是,该网络上每个节点的IP地址应设置为同一网段下的不同值,可将3个节点IP地址分别设置为:192.168.0.1、192.168.0.10 和 192.168.0.20。另外,还要注意在设置好各节点IP地址后,一定要在iFix组态软件所在的PC机中找到Windows操作系统的HOSTS文件(C:WINNTsystem32driversetc),然后将RX3i控制器的IP地址和相应的设备名称输入并保存,之后重启电脑实现网络连接。
3.2.2 串口通讯
系统中刷卡模块是通过AT89C52单片机进行控制的,因此单片机与PAC系统之间必然要进行通讯。系统利用RX3i控制器CPU自带的COM1口实现PAC与单片机刷卡模块之间的数据收发。端口1是光电隔离的RS-232兼容口。串行I/O通过使用COMM_REQ功能指令实现,梯形图程序如图6所示。图6(a)中梯形图开始时,M00009给接收程序一个脉冲让它只接收一次数据,以免造成数据混乱;图6(b)是发送数据的梯形图,是车主驶出停车场刷卡扣费后的数据回传,经过PLC的计算分析,将新的数据传回到IC卡内。
首先定义串口传输协议serial I/O、数据传输速率、奇偶性、每位字符数等。然后初始化端口,建立数据缓冲器,读端口字符串。定义串口和初始化端口是在PME编程窗口中的硬件设置中设置的,不需要编写程序。
双击COMM_REQ功能块后,根据需要配置其他功能。本系统中用到了写字节功能块(4401)和读字符串功能块(4403)。PLC通过读字符串的指令读出IC卡传来的车主数据,以16#000D(对应为回车键)为结束标志接收数据。当PLC识别到16#000D时,它就会将数据从数据缓冲器中读到指定的地址内,方便其他程序使用。
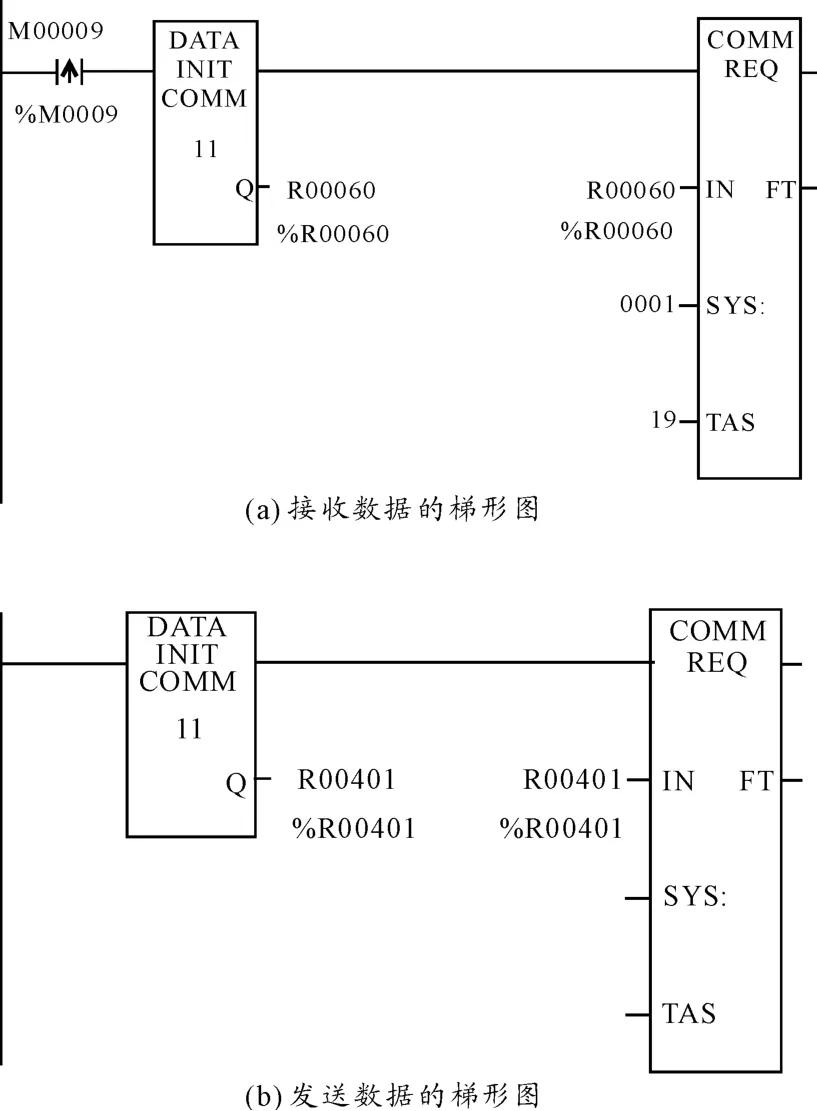
图6 串行I/O读写梯形图程序
3.3 系统软件设计流程
系统主控单元软件设计流程如图7所示。限于篇幅,其他各模块软件设计在此不做介绍。
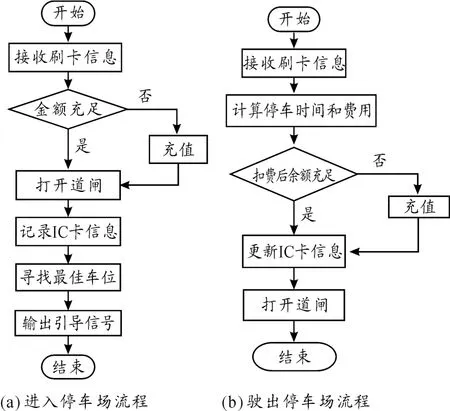
图7 系统主控单元软件设计流程
4 上位机监控软件设计
系统利用 PAC Systems RX3i、Proficy Machine Edition编程工具和专用的iFix组态软件3者互相通讯完成系统的实时监控。设计的界面包含主界面、引导界面和用户信息查询界面。主界面主要提供停车场基本信息的显示和主要功能的入口(如两层停车场的切换入口);引导界面主要显示停车和取车引导,同时显示车主IC卡信息,并实现充值服务;用户查询界面可查询用户的姓名、车牌号码、停车次数、停车费用等信息[11-12]。引导界面如图8所示。

图8 系统引导界面
5 系统模型及调试
本文研究的停车场是立体停车库,有上下两层。第1层有48个停车位,第2层有40个停车位,共88个停车位。受模型空间的限制,系统只使用了14个经典车位(楼下8个,楼上6个),每个车位都有传感器感应是否有车停放,其余车位默认为有车。硬件电路板放置于每层停车场的下方,停车场全景模型如图9所示。
采用不同区域多次停取车进行系统调试。结果表明:该系统能正确提供停取车引导且运行稳定。图10是停车引导的效果图。

图9 停车场全景模型

图10 停车引导效果图
6 结束语
本研究创造性地将GE FANUC公司的PAC Systems RX3i和AT89C52单片机有机结合起来,尽两者所长,采用模块化方式,实现了智能停车场的系统设计,方便了系统维护和管理。通过调试,基本实现了系统的主要功能,为实际大型停车场的建立提供一种新思路。但是本设计也存在一些问题,例如:虽然考虑了车辆的引导进出频繁度这一因素,但是没有切实解决,未来还需要进一步研究。
[1]虞江锋.智能立体停车库控制系统的设计与实现[J].制造业自动化,2012(5):111-113.
[2]苏磊,宋杨,胡昱希,等.停车场车位自动化管理系统的设计[J].国外电子元器件,2008,16(7):52-53.
[3]李波,李国栋,薛兴国.PLC在立体汽车库控制系统中的应用[J].机电工程,2008,25(11):72-73.
[4]郑宝举,袁永康,员超.智能立体停车库控制系统的设计与实现[J].计算机测量与控制,2003.11(6):426-429.
[5]郁汉琪,王华.可编程自动化控制器(PAC)技术及应用—基础篇[M].北京:机械工业出版社,2010.
[6]原菊梅,叶树江.可编程自动化控制器(PAC)技术及应用—提高篇[M].北京:机械工业出版社,2011.
[7]Frank D.Petruzella.PLC教程[M].3版.侯世英,译.北京:人民邮电出版社,2007.
[8]郁汉琪,郭建.可编程序控制器原理及应用[M].2版.北京:中国电力出版社,2010.
[9]游战清,李苏剑.无线射频识别技术(RFID)理论与应用[M].北京:电子工业出版社,2004.
[10]晁阳.单片机MCS-51原理及应用开发教程[M].北京:清华大学出版社,2007.
[11]葛玻,沈文杰,赵旎.工控组态王软件的对比及应用[J].计算机测量与控制,2002,10(8):550-51.
[12]韩路跃.iFIX在城市供水SCADA系统的应用[J].自动化与仪表,2004(3):59-61.
猜你喜欢
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
数学大王·低年级(2019年12期)2019-08-14
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2018年9期)2018-08-04
现代家长(2018年11期)2018-01-05
中国石油石化(2015年17期)2015-06-01
