仓储物流系统出库方式研究及取出机构的数学模型建立
2014-12-04 07:51熊建华XIONGJianhua
价值工程 2014年36期
熊建华XIONG Jian-hua
(江苏经贸职业技术学院,南京 211168)
(Jiangsu Institute of Commerce,Nanjing 211168,China)
1 仓储物流结构组成及系统出库方式
本文以中小型货物为具体的研究对象,其自重为60g~350g,货物的分布体积大致为110mm×70mm×20mm。倾斜的布置方式对于微型的自动或智能高速仓储系统货物出库的取出机构设计较为适宜,因而,储存货架拟采用倾斜的布置方式。下面我们将根据仓储物流的取出机构与仓库存储口两者之间不同的对应关系逐一进行分析。
存储与取出一一对应式指的是仓储物流中的仓库存储口位置处仅设置一个取出机构,当货架上的货物处于静止状态时,只须凭借储存货架上安装的固定挡轴即可实现货物的安全定位,当运动的时候,则须凭借仓储口处的取出机构来实现货物的顺利出库,如图1。
多存储对一取出式指的是利用仓库存储口处单个取出机构一次性取出货架上同一位置上的货物。所有用于取出货物的取出机构均水平分布于升降机上,当货架上的货物需要出库时,货架上货物的行定位首先是升降机通过上下运动来实现,随后再由水平分布于升降机上的取出机构完成货架上货物的列定位,当货架上待出库货物位置确定以后,取出机构开始执行动作直至完成货物出库操作后返回。
多存储对一取出式所对应的每个仓储存口都与之对应有一个翻板,该翻板凭借安装于储存货架架体上的扭簧所产生的扭转力来实现货架上货物静止时的定位。当货架上的货物需要出库派送时,翻板通过克服扭簧产生的扭矩开始旋转,最终使该出库货物层的货物顺利实现出库动作。随后,扭簧回到原始位置,后层货架上的货物被翻板挡住。
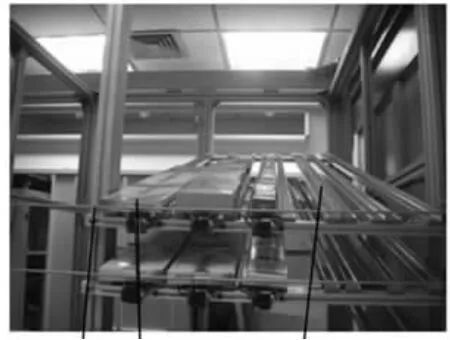
图1 一一对应式取出示意图
多存储对多取出式指的是仓库存储系统中每一列或每一行仓库存储口共同使用相同的货物出库系统驱动,通过行列网点的交叠来最终确定货架待出库货物的位置所在。多存储对多取出式结构中同样安装有翻板装置,但运行的机理和翻板的结构形状都不甚相同。多存储对多取出式可直接翻转成直角,且翻板形状为双叉形,当货架上的货物能脱离翻板定位凭借自身重力实现自动出库。
当货架上的货物处于不动状态时,货物的定位是依靠翻板在拉杆X 和Y 向上且与之对应向的销共同作用下来实现的。当货架上的货物开始发生运动的时候,X 向拉杆在与之对应向驱动力的作用下实现货物向左的运动,将对应向布置的销从翻板上拉开,随后货物所在仓库存储口的Y 向拉杆与之对应向驱动力的作用下实现向下的运动,并将对应向布置的销从翻板上放开,此时的翻板可在其自重和货物沿货架方向的滑动力共同作用下翻转一直角角度,而货架上的货物则依靠沿货架方向的滑动力顺利出库。当实现整体复位时,则按照运动的逆方向依次动作。
2 取出机构一般数学模型构建
上面对三种不同的仓储物流系统货架上货物的放置方式均采用相同的斜置布置方式,故而可将货架上的货物抽离出来单独作为研究对象来进行研究建模。其中,货架上的货物静止不动时其受力分析示意图如图2 所示。
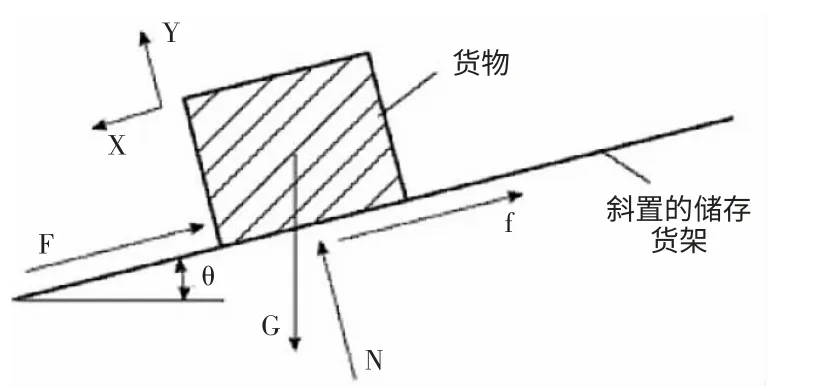
图2 货物静止不动时受力示意图
由图2 及货物受力平衡方程可得出:

其中,Fx和Fy分别为斜置储存货架沿斜面和垂直斜面方向上的力;G 为货架上货物自身的重力;f 为货物与货架间的接触摩擦力;N 为货架斜面的支撑力;F 为外力;θ为倾角。
由于货物沿垂直于货架方向无运动,故Fy向的合力为零。又可设货物的滑动力为F′,即F′=Gsinθ-f,故式(1)可化简为:

当Fx向的合力不大于零时,货物静止,当大于零时,货物开始运动直至完成出库动作。
3 取出机构不同出库方式优缺点对比研究
经过不同的现场试验表明:虽然上述三种不同的仓储物流系统取出机构与仓库存储口对应方式都能很好地实现斜置货架上的货物顺利实现出库动作,但是根据不同的出库要求仍存在部分差异。
从取出机构的一般的数学模型中,我们可知货架上的货物主要是通过重力分量来实现其出库动作的。因而,Fx向合力的大小对仓储整个系统的库存和货物出库的可靠性起着至关重要的作用。
现以250g 质量的医用药品为具体事例,对上述不同的取出机构进行定量化研究分析。经不同的现场试验发现,储物货架的斜置角度取14°~22°区间值时为最佳,本文暂选定θ=20°为参考值,接触摩擦因数可取0.045。
在存储与取出一一对应式中,货物静止不动时,力F=+∞,滑动力F′=Gsinθ-f=0.749N;货物出库时,力F=0,滑动力F′=Gsinθ-f 将逐渐变小,可得此时滑动力F′变小=0.0426N。两种不同状态对应的Fx向合力∑Fx为:

式中,∑Fx1为静止沿货架方向上的合外力;∑Fx2为货物出库时的合外力;F′小为倾角θ 由20°变小到10°所产生的滑动力。
在多存储对一取出式中,货物的定位是依靠扭簧所产生的的扭转力来定位的,外力F>Gsinθ,此时F=1N。当货物出库时,扭簧所产生的的扭转力由取出机构来克服,外力F=0N,此时,货物抬高,倾角θ 将减小,滑动力=0.0426N。货物静止不动与出库所对应的力学模型为:

在多存储对多取出式中,货物同样是利用固定挡轴来实现定位,需施加的外力F=+∞,当货物出库时,此时不使用翻板,外力F=0N,倾角θ 不发生变化,滑动力仍为F′。货物静止不动与出库所对应的力学模型为:

经式(3)~式(5)对比可发现,从功能等效和经济性角度来看,多存储对多取出式时所获取出机构的可靠性最高。
4 结论
本文通过对三种不同取出机构性能优缺点的对比分析和现场试验验证,针对不同的仓储物流系统来说,应合理选择不同的取出机构,以取得更好的经济和社会效益。
[1]张正义.自动仓储系统及其应用[J].物流技术及应用,2006,11(7).
[2]曹彬.现代仓储物流管理信息系统分析与设计[J].物流技术,2008,11(1).
[3]程娟,唐岫,倪铉珣.现代企业仓储物流的发展模式与对策[J].物流工程与管理,2013,35(6).
猜你喜欢
空间电子技术(2022年3期)2022-08-09
机械制造与自动化(2022年3期)2022-06-24
探索科学(学术版)(2021年7期)2021-08-05
南京大学学报(数学半年刊)(2020年1期)2020-03-19
水利技术监督(2016年6期)2017-01-15
小雪花·成长指南(2015年5期)2015-05-25
机械工程师(2015年10期)2015-02-02
压缩机技术(2014年5期)2014-02-28
河南科技(2014年11期)2014-02-27
中国空间科学技术(2011年5期)2011-11-26