
凹球面换能器加热治疗中温度控制方法研究
2014-08-31 10:06廖志远钱盛友丁亚军
湖南师范大学自然科学学报 2014年1期
廖志远,钱盛友*,丁亚军,明 文
(1.湖南师范大学物理与信息科学学院,中国 长沙 410081;2.湖南师范大学图像识别与计算机视觉研究所,中国 长沙 410081)
凹球面换能器加热治疗中温度控制方法研究
廖志远1,钱盛友1*,丁亚军2,明 文1
(1.湖南师范大学物理与信息科学学院,中国 长沙 410081;2.湖南师范大学图像识别与计算机视觉研究所,中国 长沙 410081)
高强度聚焦超声(HIFU)治疗肿瘤是目前临床治疗的一种有效方法,治疗过程中组织内的温度控制十分重要.本文针对HIFU治疗过程中用时过长、超调、振荡等特性及控制延时的问题,提出了一种模糊控制方法以优化系统的控制性能.该方法采用Mamdani推理型模糊控制器代替传统的控制器,依据模糊控制规则控制凹球面换能器的输出声功率,实现对治疗区温度的精确控制.Matlab仿真结果表明,模糊控制的引入有效地缩短了治疗时间,避免了超调和振荡现象,且在声源参数不同的条件下均能获得理想的控制效果.该方法相对PID控制具有明显的优势,对提高HIFU疗效有重要意义.
凹球面换能器;热疗;模糊控制;PID控制;超声聚焦;温度
高强度聚焦超声(HIFU)治疗是目前国际超声治疗学领域中的一个研究热点,其原理是以超声波为能量载体,通过超声波对人体组织形成热效应、机械效应、空化效应,达到治疗或康复的目的,其最大的优势在于消除病灶的同时,尽可能不损伤周围正常组织,从而达到无创治疗[1].临床应用中,准确的聚焦、焦域的温度和超声辐照时间的控制相当重要,本文以凹球面自聚焦换能器为例,根据BHTE模型[2-5],运用Matlab模糊控制进行仿真实验,得出不同条件下,模糊控制在凹球面自聚焦换能器温度场控制效果.由于HIFU治疗温度控制具有单向性,即只控制升温,降温靠自然冷却,且组织特性参数具有时变性,本文运用模糊合成推理方法设计模糊控制器,并在此基础上进行控制器的自调整算法设计,以提高系统控制精度.
1 换能器及生物组织模型
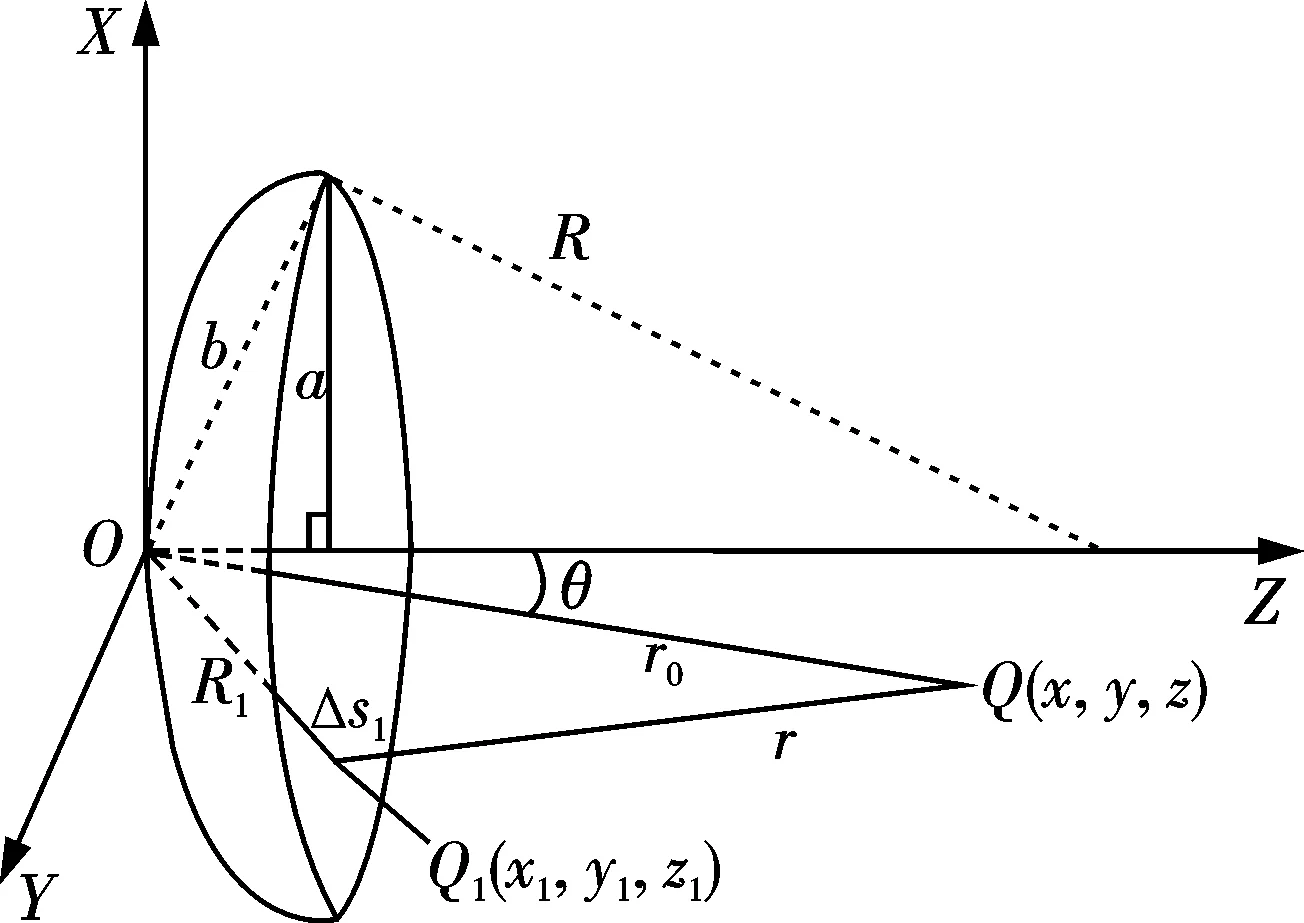
图1 凹球面聚焦换能器示意图Fig.1 Concave spherical transducer
1.1 凹球面自聚焦换能器声场模型
如图1所示,所用凹球面自聚焦换能器振速幅值为u,曲率半径R取4.2 cm,半孔径a取1.5 cm,振动频率为f,媒质中的声速为c,衰减系数为α,媒质的密度为ρ.
φ是面元Δsi与场点Q的方位角之差,要求任意点Q的总声压,则需要对整个凹面求积分,可通过下列算式求得[6]:
(1)
式中,p0=jρfu.
1.2 生物组织的传热模型
在HIFU治疗肿瘤时,聚焦超声热源引起生物机体的温度升高通常采用Pennes的生物传热方程[7-8]:

(2)

(3)

2 控制系统总体方案及算法
2.1 控制系统总体方案
图2为模糊控制器应用在凹球面自聚焦换能器温度的仿真原理图.依据目标靶组织的位置及组织的参数,选取对应的声场模型,并对焦域中心位置进行检测.系统中E为预期温度T0与实际温度T的差值,EC为温升变化率;把E、EC输入到模糊控制器两输入三输出的子系统[10-12],子系统根据输入选择合适的量化因子,对输入清晰量进行缩小或者放大,以便和模糊控制器的模糊化模块很好地匹配,同时子系统输出端口3输出的比例因子对模糊控制器输出的清晰量U进行缩小或者放大得到u(u为振速幅值),用u控制凹球面换能器输出声功率,再由图中的BHTE依据凹球面换能器输出功率得到的声场计算靶组织的实际温度.

图2 仿真原理图Fig.2 Simulation theory
2.2 模糊逻辑控制算法

图3 输出隶属度函数Fig.3 Membership function of outputs
图2中模糊控制器控制换能器的发射功率进而控制靶区温升,声场整体能量的大小由模糊控制器输出得到的精确量u控制,因而u的大小直接影响温度值.为达到实时控制的要求,模糊控制器的设计应简洁,其模糊推理机制为:如果Ei为Ii,并且ECi为IIi,那么Ui为IIIi,其输出隶属度函数见图3,其中横坐标U为输出值范围,纵坐标为隶属函数的隶属度,取值范围[0,1],图中N1为Z形隶属函数、N7为S形隶属函数、其他为三角形隶属函数.
控制器的具体设计步骤如下:
1)模糊化过程 由于系统温控的单向性,对输入和输出控制量的模糊语言描述(模糊集)定义为7个等级:设定输入变量E和EC语言值的模糊子集为{N1,N2,N3,N4,N5,N6,N7},将E和EC量化到(0,6)的区域内.同样,设定输出量U的模糊子集为{N1,N2,N3,N4,N5,N6,N7} ,并将其量化到区域(0,6)内.
2)模糊推理 模糊控制的核心是控制规则的建立.把实际操作的经验加以总结,得到相应的控制规则(表1),从而建立模糊控制器.表1中共49条控制规则,每条隶属度函数规则都可以给出一个模糊蕴涵关系Xi(i=1,2,…,49),这些模糊蕴涵关系并构成总的模糊蕴涵关系,如式(4):
X=X1∪X2∪…∪X49.
(4)
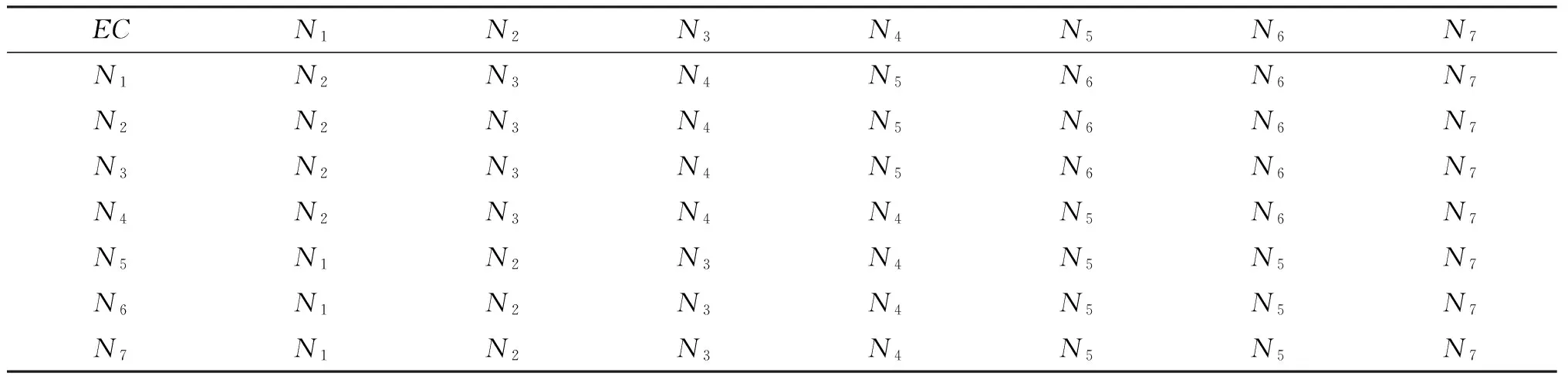
表1 E与EC的隶属度函数变化对应U的隶属度函数变化控制规则表
表1中的模糊蕴涵关系合成的模糊推理规则如式(5):
U=((E∧EC)∘X1)∨((E∧EC)∘X2)…∨((E∧EC)∘X49).
(5)
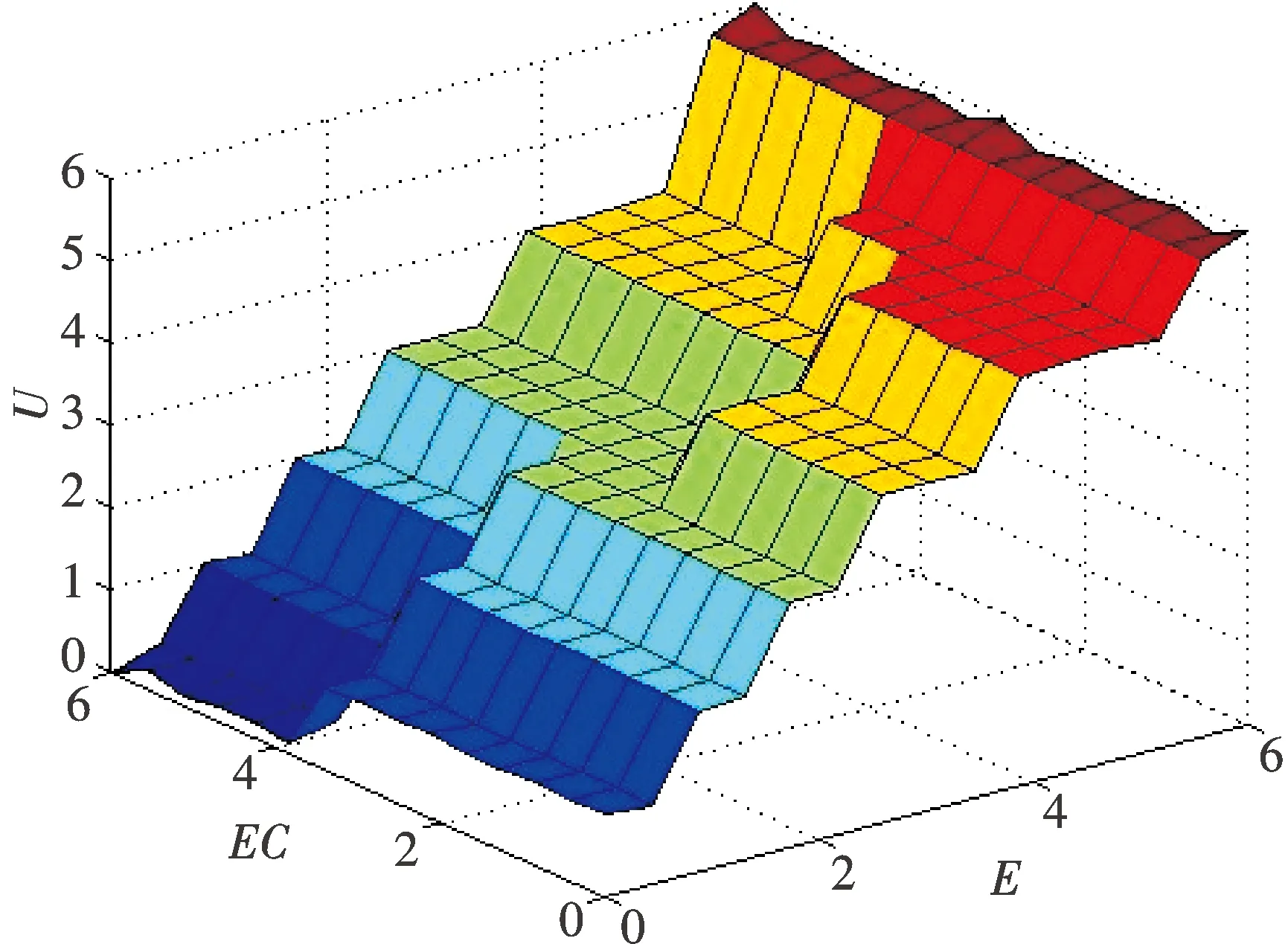
图4 输入输出关系曲面图Fig.4 Surface relationship between inputs and outputs
3)去模糊化 通过模糊推理得到的输出是一个模糊子集,其隶属度函数不是一个精确量,如果用这个输出去控制凹球面换能器是不可能的,必须对其去模糊化,这里采用加权平均法进行去模糊化.如式(6)所示:
(6)
其中Ui为第i条规则输出的结果(i=1,2,…,49),μ(Ui)表示第i条规则在总输出中占的权重.按此方法设计的的模糊控制器的输出与输入的关系曲面如图4所示.显然该控制是非线性控制.
3 仿真与结果分析
仿真时,凹球面自聚焦换能器曲率半径为4.2 cm、半孔径为1.5 cm、超声频率分别选取1 MHz和1.5 MHz,以60 ℃作为目标温度,选取声轴上Z为4.2 cm处作为监测点,仿真采用均匀肌肉组织模型,其组织密度为1 050 kg/m3,声速为1 547 m/s,吸收系数为5 Nep/m;在整个仿真中,通过控制凹球面换能器的振速幅值u达到改变声源功率,从而控制靶组织温升.图5是控制过程中换能器振速幅值u的变换情况.
从图5中可以看出,换能器以最大功率开始运行,而后根据升温程度调节换能器输出声功率.当靶区达到目标温度后,换能器输出声功率达到稳定状态以补偿因血流灌注等所引起的热损失.
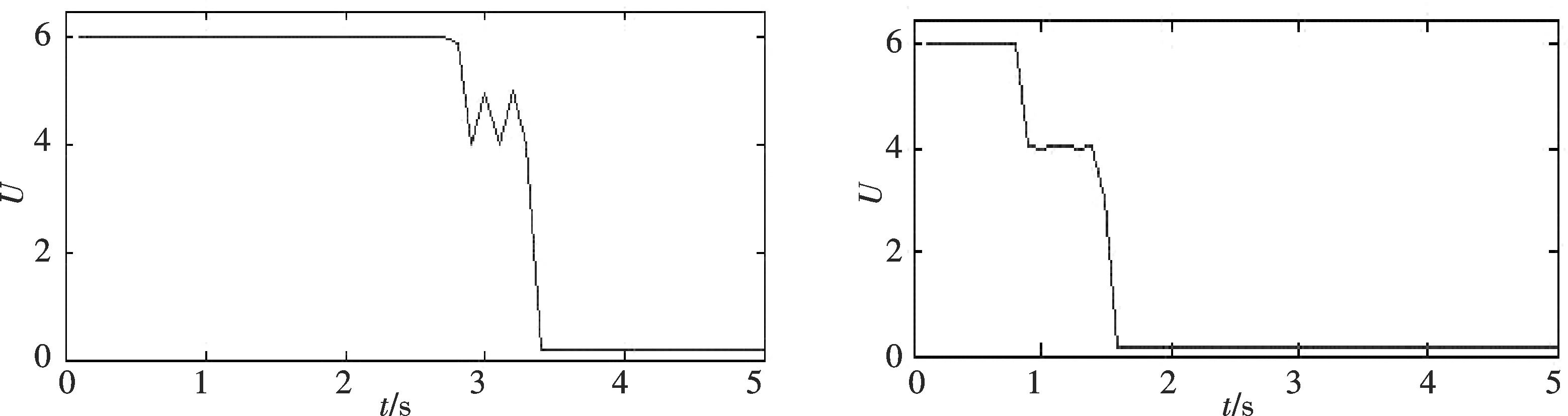
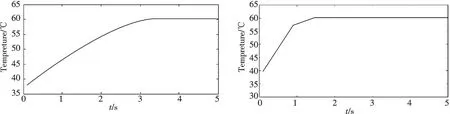
(a)f=1 MHz (b)f=1.5 MHz
图6记录了上述两种频率条件下,控制点的温度随时间的变化.图6(a)中达到目标温度需要的时间是3.4 s,图6(b)中达到目标温度需要的时间是1.5 s,可以看出,表面声压越大,达到目标温度所需时间越短.
(a)f=1 MHz (b)f=1.5 MHz

图7 模糊控制不同频率凹球面换能器Z轴温升对比 Fig.7 Comparison of temperature in Z axis after fuzzy control in different frequencies
图7是频率为1 MHZ和1.5 MHZ时,Z轴上的最终温度分布.由图可见,两种不同情况在模糊控制下达到的温度走势、大小很相近,说明不同频率换能器在模糊控制作用下均能得到理想的控制结果.
选取声轴上Z为3.2 cm的点作为被控制点,目标温度设为43 ℃,凹球面换能器最大辐射功率为35 W,分别运用PID控制模型和模糊控制模型进行仿真,结果如图8.
从图8(b)中可以看出,经历20 s左右升温之后,温度进入到“43 ℃预稳定”阶段,经历50 s达到43 ℃稳定状态.从整个过程来看,在预稳定过程中出现了超调现象,虽然最终温度达到预期值,但预稳定过程中出现温度过高,可能会损伤靶区周围正常组织.

图8 PID控制时声功率输出(a)和温度响应(b)Fig.8 Acoustic power output (a) and temperature response (b) in PID control

图9 模糊控制时声功率输出(a)和温度响应(b)Fig.9 Acoustic power output (a) and temperature response (b) in fuzzy control
从图9中可以看出,经过微小的波动后,经历26 s左右达到43 ℃稳定状态,整个温升过程中没有出现超调现象,进入稳定状态后也没有出现振荡现象.因此,模糊控制HIFU治疗温度能达到预期效果.
4 结束语
本文依据差分法求解Pennes生物传热方程,运用Matlab仿真分析了不同条件下模糊控制方法对凹球面自聚焦换能器加热的控制效果.仿真结果表明:声源初始声压越大,靶区达到目标温度所需要的时间越短;通过对比不同频率换能器仿真结果,可知该控制器能控制不同频率换能器输出使靶区达到目标温度;对比PID控制和模糊控制,可知模糊控制能有效缩短治疗时间,避免超调和振荡.
[1] 钱盛友,刑 达,孙福成,等.热疗用聚焦超声换能器的研究[J].应用声学, 2000,19(3):2-23.
[2] 尹 昌,刘晓宙,龚秀芬,等.超声引起的双层生物组织中的温度场研究[J].中国生物医学工程学, 2009,28(1):42-47.
[3] 毛彦欣,程建政,张德俊,等.凹球面HIFU换能器声焦域的位置和形状[J]. 中国超声医学杂志, 2004,20(7):558-560.
[4] DHIRAJ A, DANIEL C, TRENT P. Thermal dose control of ultrasound therapies using MR thermometry images: an in-vitro phantom study[C].American Control Conference, Porland, Oregon, America, 2005:405-410.
[5] LU M Z, WAN M X, XU F,etal. Focused beam control for ultrasound surgery with spherical-section phased array: sound field calculation and genetic optimization algorithm[J]. IEEE Trans Ultrason Ferroelect Freq Contr,2005,52(8):1270-1290.
[6] 胡继文,钱盛友.伪逆算法的改进及其用于相控阵激发声场的控制[J].系统仿真学报, 2010,22(5):1111-1116.
[7] 孙武军,张弥左,李文龙,等.高强度聚焦超声换能器温度场的数值仿真[J].生物物理学报, 2009,25(5):366-371.
[8] MATTI M, TOMI H, JARI P K. Thermal dose optimization method for ultrasound surgery[J]. Phys Med Biol, 2003,48(3):745-762.
[9] 丁亚军,钱盛友,胡继文,等. 凹球面换能器在多层生物组织中的温度场仿真 [J].计算机工程与应用, 2011,47(36):242-244.
[10] 李祖欣.MATLAB 在模糊控制系统设计和仿真的应用[J].系统仿真学报, 2003,15(1):132-134.
[11] 张德丰.MATLAB模糊系统设计[M].北京:国防工业出版社, 2009.
[12] 黄卫华,方康玲.模糊控制系统及应用[M].北京:电子工业出版社, 2012.
(编辑 陈笑梅)
Research on Temperature Control Method for Concave Spherical Transducer Hyperthermia
LIAOZhi-yuan1,QIANSheng-you1*,DINGYa-jun2,MINGWen1
(1. College of Physics and Information Science, Hunan Normal University, Changsha 410081, China;2.Institute of Image Recognition and Computer Vision, Hunan Normal University, Changsha 410081, China)
Treatment of tumors with high intensity focused ultrasound (HIFU) is an effective treatment method in clinical application, and it is very important to control the temperature in tissues during treatment. For the longer time therapy, overshoot, oscillation and time-delay of temperature control during HIFU hyperthermia, a fuzzy control algorithm is presented to optimize the control properties of the treatment system. The algorithm adopts mamdani reasoning fuzzy controller to replace the traditional controller and control the concave spherical transducer’s output acoustic power based on the fuzzy control rules to implement accurate temperature control in treatment volume. Matlab simulation results show that the fuzzy control can effectively shorten the treatment-time, avoid overshoot and oscillation, and obtain the ideal control effect in condition of different acoustic parameters. This method is significant to improve curative effect and has obvious advantages compared with PID controller.
concave spherical transducer; hyperthermia; fuzzy control; PID control; ultrasonic focusing; temperature
2013-12-12
国家自然科学基金资助项目(11174077);湖南省自然科学基金资助项目(11JJ3079);湖南省教育厅基金资助项目(12C0237)
*
,E-mailqiansy@hunnu.edu.cn
TP273+.4
A
1000-2537(2014)01-0048-05
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
西南交通大学学报(2018年5期)2018-11-08
光学仪器(2018年3期)2018-10-10
科技创新与应用(2017年11期)2017-04-27
海军航空大学学报(2016年6期)2016-12-27
汽车与新动力(2015年1期)2015-02-27
噪声与振动控制(2015年4期)2015-01-01
山东工业技术(2014年17期)2014-12-24
