
基于二维逆滤波的机载SAR自聚焦算法
2016-12-27 03:21胡国光
海军航空大学学报 2016年6期
胡国光,宋 伟
(1.海军装备部上海局;2.中航工业雷华电子技术研究所,江苏无锡214200)
基于二维逆滤波的机载SAR自聚焦算法
胡国光1,宋 伟2
(1.海军装备部上海局;2.中航工业雷华电子技术研究所,江苏无锡214200)
在聚束合成孔径雷达(SAR)自聚焦处理时,残留距离徙动(RRCM)必须在自聚焦处理之前完全去除,否则将会严重降低自聚焦的性能。本文提出了一种基于二维逆滤波的自聚焦算法,该算法在补偿相位误差的同时也补偿掉距离和方位的二维耦合相位,消除了RRCM对自聚焦的影响,提高了逆滤波自聚焦算法的性能。最后通过实测数据处理验证了本文提出的二维逆滤波自聚焦算法的有效性。
合成孔径雷达;聚束;逆滤波;自聚焦;残留距离徙动
机载SAR通过载机沿理想航迹匀速运动并以固定脉冲重复频率发射线性调频脉冲来获得高分辨图像[1]。运动补偿是机载SAR系统获得高分辨图像的关键[2-6]。随着成像分辨率的不断提高,残留的运动误差会造成高分辨图像的散焦。基于回波数据的自聚焦技术对高分辨成像起到关键的作用,它有效地弥补了经过运动补偿之后的残留运动误差对图像散焦的影响[7-13]。对散焦的SAR图像做自聚焦前,必须完全校正RRCM。否则,会造成图像中目标点两维散焦[14-18],严重影响自聚焦的性能。若要完全校正RRCM并精确估计相位误差往往是非常困难的。但当图像中存在孤立的强点目标时,通过提取该点目标的两维响应估计出RRCM和相位误差,可有效解决这个问题[17]。本文结合实测数据分析了存在较严重的RRCM对自聚焦的影响,提出一种基于二维逆滤波的自聚焦方法。该方法的优势在于不受RRCM的影响,可以有效校正RRCM和精确估计相位误差,但是其性能受所选择的强点目标的信杂比影响。
1 基于逆滤波的自聚焦算法
1.1 基于一维逆滤波的自聚焦算法回顾
当考虑相位误差对图像造成的影响时,可以认为模糊图像是清晰图像与相位误差函数逆傅里叶变换(IFFT)卷积的结果,由此建立模型:

式(1)中:g(k,n)表示清晰SAR图像;gε(k,n)表示散焦的SAR图像;⊗表示卷积;k表示距离坐标;n表示方位坐标;ϕ(n)表示相位误差。
自聚焦算法大多都是在没有相位误差先验信息的情况下,从gε(k,n)数据中估计g(k,n)。逆滤波法是在散焦的SAR图像中选择一个孤立的强点目标,从这个点目标的二维响应中估计ϕ(n)。假定第k个距离门上孔径中心的位置上存在一个孤立的强点目标,在没有相位误差情况下,该点目标的响应可表示为

将式(2)代入式(1)并化简得到:

对式(3)两端做傅里叶变换(FFT)可以得到相位误差的估计值:

式中,∠表示取复数的相角。
最后,通过对所有距离门的距离压缩数据共轭相乘估计得到的相位误差函数,就可以从散焦的gε(k,n)图像数据中恢复清晰的g(k,n)图像。通常SAR图像中很难找到一个信杂比很大的孤立点目标,然而一旦图像中存在孤立强点目标,采用逆滤波自聚焦方法就会得到较好的效果。
1.2 基于二维逆滤波的自聚焦算法
与子孔径相关法、相位梯度自聚焦算法一样,上节描述的基于一维逆滤波的自聚焦算法也是在残余距离徙动小于一个距离分辨单元的前提下去估计方位向一维的相位误差。而当残余距离徙动超出多个距离单元时,利用这些方法对散焦的SAR图像做自聚焦之前,必须完全校正残余距离徙动。否则,会造成图像中目标点两维散焦。本节在一维逆滤波方法的基础上,提出一种基于二维逆滤波的自聚焦算法,与常规自聚焦算法只补偿方位相位误差不同,新算法在提取方位相位误差的同时将距离和方位的二维耦合相位也一并提取并补偿,避免了残余距离徙动对自聚焦性能的影响,补偿精度更高[13]。
假定模糊图像是清晰图像与二维相位误差函数的二维逆傅里叶变换(IFFT)卷积的结果,建立模型:

同样,该点目标的二维响应可以表示为:

将式(6)代入式(5)并化简得到:
对式(7)两端做二维傅里叶变换(FFT)可以得到相位误差的估计值:

最后,通过对二维频域数据域共轭相乘估计得到的相位误差函数,就可以从散焦的gε(k,n)图像数据中恢复清晰的g(k,n)图像。通常SAR图像中很难找到一个信杂比很大的孤立点目标,然而一旦图像中存在孤立强点目标,采用逆滤波自聚焦方法就会得到较好的效果。
1.3 杂波的影响分析
在选择孤立强点目标时,难免会包括强点目标周围的弱目标,这些弱目标被作为竞争杂波影响着二维逆滤波自聚焦算法的性能。为了分析选择点目标信杂比的影响,我们将选择的孤立强点目标作为期望的信号,点目标周围的散射点作为竞争杂波。将式(8)估计出的二维相位误差表示成:

式(9)中:ϕr(k,n)为竞争杂波带来的相位函数;∠σ代表点目标未知的常数相位,对聚焦没有影响;ϕr(k,n)将会是影响聚焦性能的主要因素,经过相位误差补偿之后:
从式(11)可以看出经过相位误差补偿之后的图像仍然存在残留的相位ϕr(k,n),这个残留相位是由竞争杂波引入的。竞争杂波主要由强点目标周围的独立散射点组成,由于这些散射点都在强点目标周围很小的区域内,所以它们的相位误差的空变性忽略不计,这些散射点的距离方位二维耦合相位的空变性同样可以忽略不计。残留相位ϕr(k,n)主要包括各个散射点常数相位∠σ(k,n),线性相位f(k,n)以及高斯白噪声ω(k,n)。

如果选择的点目标的信杂比足够大,那么残留相位误差ϕr(k,n)对恢复清晰图像的影响可以忽略不计。
2 实测数据处理
2.1 实测数据描述
选取的实测数据是机载X波段聚束SAR试飞数据,系统带宽为1.3 GHz,距离分辨率优于0.15 m。合成孔径长度为2km,方位分辨率达到0.15 m。雷达作用距离为16km,载机地速为101 m/s,飞行高度为7.5km。
本文在缺少惯导参数情况下采用极坐标格式算法(PFA)处理实测数据,并在大图中选取一小块图像作为分析样本。图1 a)为经过PFA处理得到的SAR图像,从图中可以看出目标方位向散焦比较严重。对该图1 a)做PGA处理后得到图1 b),经过自聚焦处理后图像质量得到了一定程度的改善,但是点目标的散焦仍然比较严重。图2为点目标RRCM轨迹。
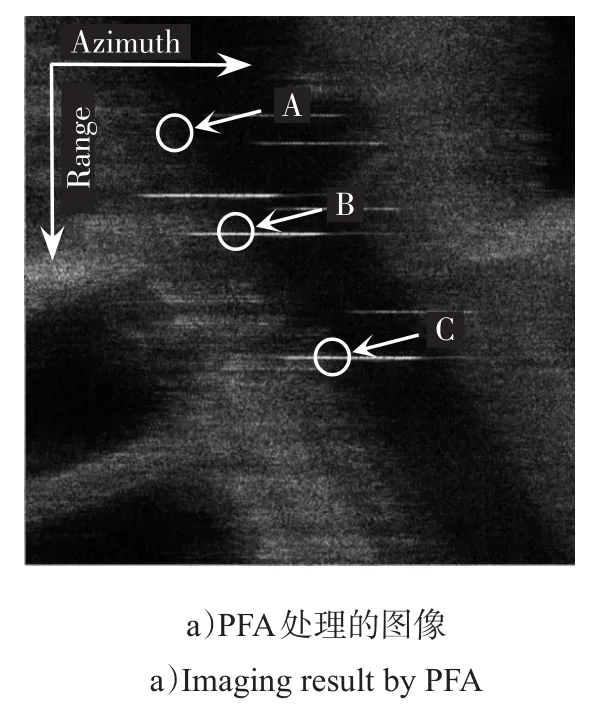

图1 机载X波段聚束SAR图像Fig.1 Airborn X-band spotlight SAR image

图2 点目标RRCM轨迹Fig.2 RRCM of point target
2.2 基于二维逆滤波自聚焦算法的实测数据处理
采用二维逆滤波自聚焦处理实测数据,选取图1的B点作为孤立的强点目标,提取B点周围64×64个像素大小的区域进行二维逆滤波自聚焦。认为这个区域包括了B点的二维响应,通过本文提出的二维逆滤波自聚焦算法进行处理得到如图3所示的SAR图像。从图中可以看出,图像聚焦质量得到明显提高。

图3 逆滤波自聚焦的SAR图像Fig.3 Autofocused SAR image by inverse filtering
为衡量所选择的强点目标的信杂比对自聚焦性能的影响,分别选取2个信杂比不同的点目标A和B,这2个点在图3中标注出来。从图3中可以看出,B点的信杂比要大于A点的信杂比,提取这2个点的二维响应分别进行自聚焦处理,并通过分析B点的方位向包络曲线来衡量其自聚焦的性能。图4虚线为选取信杂比较小的A点做自聚焦后B点的方位向包络曲线,实线为选取信杂比较大的B点做自聚焦后B点的方位向包络曲线。为显示需要,图4做了32倍内插处理。从图4中看出,采用强信杂比的孤立点目标作二维逆滤波后,强散射点的响应更窄,图像质量明显提高。

图4 点目标B的方位向包络曲线Fig.4 Azimuth amplitude curve of point B
为了量化一维逆滤波和二维逆滤波的性能差异,分析C点目标的方位向包络曲线,为显示需要进行32倍内插处理,如图5所示。图5中,虚线代表采用一维逆滤波自聚焦算法,实线代表采用二维逆滤波自聚焦算法。从图5中明显看出,二维逆滤波自聚焦算法处理后C点的主瓣宽度更窄,聚焦效果比一维逆滤波自聚焦算法更好,从C点的方位向包络曲线得到方位分辨率为0.12 m(3dB宽度)。

图5 C点的方位向包络曲线Fig.5 Azimuth amplitude curve of point C
3 结论
对于高分辨机载SAR,由于惯性导航的精度有限,很难完全补偿载机的非平稳运动,残留的运动误差造成经过成像处理的点目标仍然存在RRCM,这种RRCM必须在自聚焦处理之前完全去除,否则将会降低自聚焦的性能。本文提出一种基于二维逆滤波的自聚焦算法,在提取方位相位误差的同时将距离和方位的二维耦合相位也一并提取并补偿,避免了RRCM对自聚焦性能的影响,大大提高了逆滤波自聚焦算法的性能。最后,通过实测数据的处理,验证了本文提出的算法的有效性。
[1]CUMMING I G,WONG FH.Digital processing of synthetic aperture radar data:algorithm and implementation [M].Norwood:Artech House,2005:1-30.
[2]XING MENGDAO,JIANG XIUWEI,WU RENBIAO,et al.Motion compensation for UAV SAR based on raw radar data[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(8):2870-2883.
[3]LI Y L,LIANG X D,DING C B,et al.Improvements to the frequency division-based sub aperture algorithm for motion compensation in wide-beam SAR[J].IEEE Geoscience and Remote Sensing Letters,2013,10(5):1219-1223.
[4]LI YINWEI,DENG YUAN,XIANG MAOSHENG.Effects of center-beam approximation on motion compensation for airborne interferometric SAR[J].Journal of Electronics&Information Technology,2014,36(2):415-421.
[5]DING ZEGANG,LIU LUOSI,ZENG TAO,et al.Improved motion compensation approach for squint airborne SAR[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(8):4378-4387.
[6]JIANG R,ZHU D,SHEN M,et al.Synthetic aperture radar autofocus based on projection approximation subspace tracking[J].IET Radar,Sonar&Navigation,2012,6(6):465-471.
[7]WAHL D E,EICHEL P H,GHIGLIA D C,et al.Phase gradient autofocus-A robust tool for high resolution SAR phase correction[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(3):827-834.
[8]SHAO PENG,LI YACHAO,XING MENGDAO,et al. Autofocus algorithm using blind homomorphic deconvolution for synthetic aperture radar imaging[J].Acta Aeronautica etAstronautica Sinica,2015,36(5):1606-1615.
[9]LI YAKE,LIU CHANG,WANG YANFEI,et al.A robust motionerror estimation method based on raw data[J]. IEEE Transactions on Geoscience and Remote Sensing,2012,50(7):2780-2790.
[10]ZHANG LEI,QIAO ZHIJUN,XING MENGDAO,et al. A robust motion compensation approach for UAV SAR imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(8):3202-3218.
[11]BEZVESILNIY O O,GOROVYI I M,VAVRIV D M.Estimation of phase errors in SAR data by Local-Quadratic map-drift autofocus[C]//2012 13thInternational Radar Symposium.Warsaw:Warsaw University,2012:376-381.
[12]ZHONG XUELIAN,GUO HUADONG,XIANG MAOSHENG,et al.Residual motion estimation with point targets and its application to airborne repeat-pass SAR interferometry[J].International Journal of Remote Sensing,2012,33(2):762-780.
[13]XIONG TAO,XING MENGDAO,WANG YONG,et al. Minimum entropy-based autofocus algorithm for SAR data using Chebyshev approximation and method of series reversion,and its implementation in a data processor[J]. IEEE Transactions on Geoscience and Remote Sensing,2014,52(3):1719-1728.
[14]XU GANG,XING MENGDAO,ZHANG LEI,et al.Robust autofocusing approach for highly squinted SAR imagery using the extended wavenumber algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing,2013,51(10):5031-5046.
[15]YANG LEI,XING MENGDAO,WANG YONG,et al. Compensation for the NsRCM and phase error after polar format resampling for airborne spotlight SAR raw data of high resolution[J].IEEE Geoscience and Remote Sensing Letters,2013,10(1):165-169.
[16]ZENG LETIAN,LIANG YI,XING MENGDAO,et al. Autofocus algorithm of high resolution SAR based on polar format algorithm processing[J].Journal of Electronics &Information Technology,2015,37(6):1409-1415.
[17]SONG WEI.Study on airborne high resolution SAR imaging and location techniques[D].Nanjing University of Aeronautics andAstronautics,2014.
[18]MAO XINHUA,ZHU DAIYIN,ZHU ZHAODA,et al.2-D autofocus algorithm for ultra-high resolution airborne spotlight SAR imaging[J].Acta Aeronautica et Astronautica Sinica,2012,33(7):1289-1294.
Autofocus Algorithm for Airborne SAR Based on the Two-Dimensional Inverse Filtering
HU Guoguang1,SONG Wei2
(1.Shanghai Military Representatives Bureau of NED; 2.AVIC Radar and Avionics Institute,Wuxi Jiangsu 214200,China)
For spotlight mode synthetic aperture radar(SAR)autofocusing,the traditional autofocus algorithm might suffer from performance degradation in the presence of residual range cell migration.In this paper,a two-dimensional inverse fil⁃tering autofocus algorithm was presented.The algorithm not only could compensate the azimuth phase error but also could remove the coupling terms between range and azimuth frequency domain,which avoided the effect caused by the RRCM in autofocus processing and improved the performance of inverse filtering autofocus algorithm.The results processed by real measured data indicated the effectiveness of the proposed method.
SAR;spotlight;inverse filtering;autofocus;residual range cell migration
TN959.73
A
1673-1522(2016)06-0625-04
10.7682/j.issn.1673-1522.2016.06.005
2016-08-26;
2016-11-06
胡国光(1977-),男,工程师,硕士。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
幼儿园(2021年12期)2021-11-06
今日中国·法文版(2020年7期)2020-07-04
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
山东青年(2016年2期)2016-02-28
