模糊自适应PID控制在PLC控制系统中的应用
2014-07-16 06:00钟建伟
湖北民族大学学报(自然科学版) 2014年2期
龙 洋,徐 超,钟建伟
(1.湖北民族学院科技学院,湖北 恩施 445000;2.湖北民族学院信息工程学院,湖北恩施 445000)
工业是社会分工发展的产物,其主要特征为自动化.现阶段,实现自动化主要依托于微电子技术以及先进算法的蓬勃发展.工业生产的过程中,被控对象往往是非线性、多变量、时变的复杂系统,具有不确定性的特点.文中应用PLC控制系统,可用多种有效的控制算法去满足各类要求的工业控制过程.且通过对传统PID控制算法和模糊自适应PID控制算法进行了比较和分析,表明后者具有更好的动态性能.
1 控制算法
众所周知,传统PID控制研究的控制对象模型确定的,若在PLC控制中运用传统PID控制,则必须将其离散化,用相应的数值计算代替这里的积分、微分.
如选择0为积分初值,T为采样周期,将其离散化后为如下公式.

模糊自适应控制研究的控制对象模型是非线性的、不确定的控制系统.模糊集合论、模糊语言变量、模糊逻辑推理是其理论基础,模糊自适应控制是控制理论发展的高级产物[1].而模糊自适应PID控制器结合了传统PID控制的特点,能够在线修改PID控制器参数Kp,Ki,Kd,使系统大大提高适应能力,从而得满意的动态性能,控制原理图如图1所示.
2 PLC编程的实现
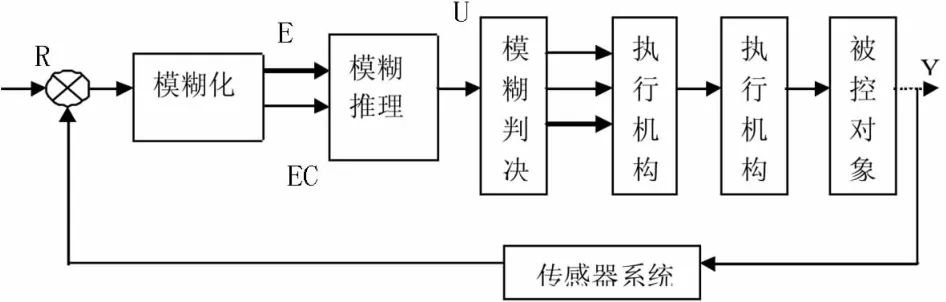
图1 模糊自适应PID控制原理框图Fig.1 Fuzzy adaptive PID control block diagram
模糊集合理论为PLC模糊控制的核心,在PLC运用模糊控制的过程中,把控制理论转化为PLC的知识库和程序[2].
本文采用三菱FX2N系列的PLC来实现模糊自适应PID控制.用梯形图分别表示出模糊PID控制的三个过程:模糊化程序、模糊推理程序、解模糊程序.[3]
模糊化子程序,先是比较“标值形参”和“输入现值”D0的大小,如果D0大,则M0 ON,则“输入现值”被“标值形参”减;否则M0 OFF,“标值形参”D1被“输入现值”D0加,并将此值存于D72中,然后把这个值乘以10.此差值被“上半范围”D2或“下半范围”D3除,其商存于D72中.最后,用这个商减去10,其结果存于“入集形参”D4中.即为隶属度[4].其为0~10之间的数,如图2所示.在主程序调用模糊推理子程序之前,需对“模糊输出指针”和“模糊关系指针”进行赋值[5],见图3.在文中PLC控制系统中,解模糊程序的任务就是根据Kp输出模糊子集的隶属度、Ki输出模糊子集的隶属度、Kd输出模糊子集的隶属度[6]确定相应的输出.地址D70为模糊输出指针的指向,该程序用以查找最大隶属度的模糊子集.其中采用了多个比较指令,是为了把最大隶属度模糊子集的地址保存在D98中[7].同时将其对应的输出值保存在D96中,为取得对应的输出准备数据,如图4所示.
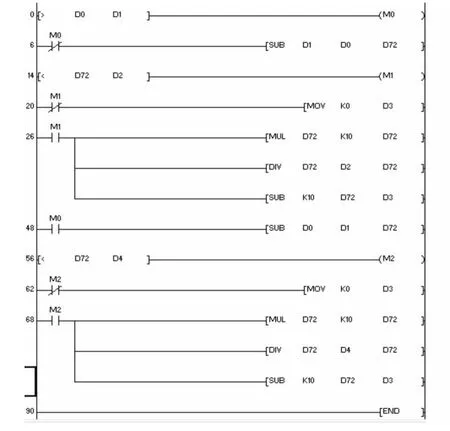
图2 模糊化子程序Fig.2 Fuzzy subroutine
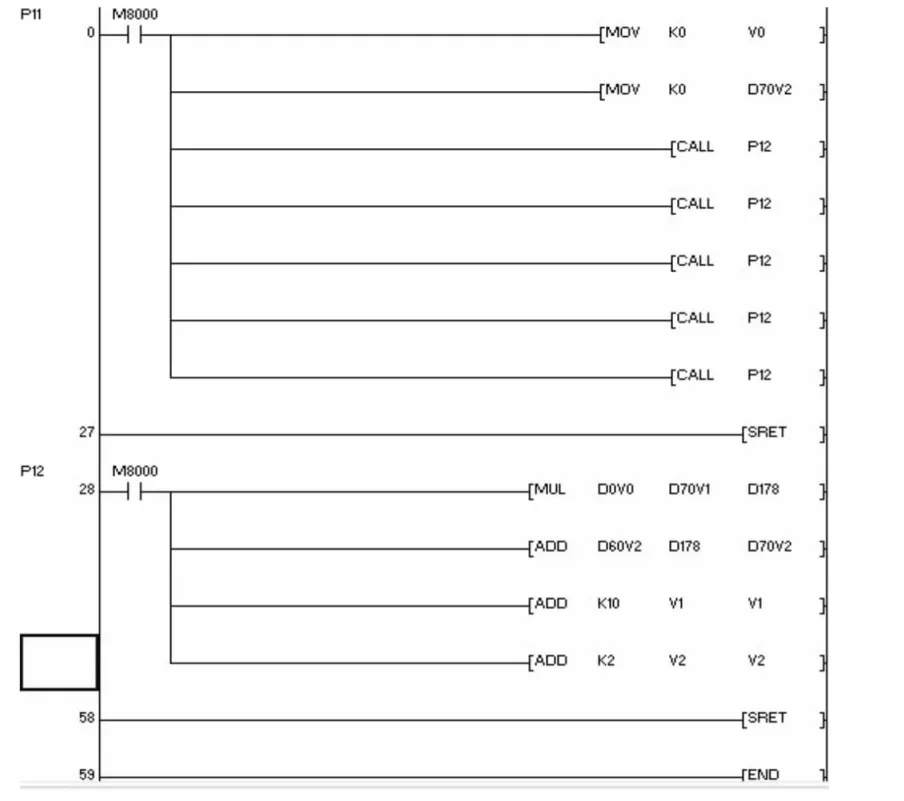
图3 模糊推理子程序Fig.3 Fuzzy inference subroutine
3 Simulink建模仿真
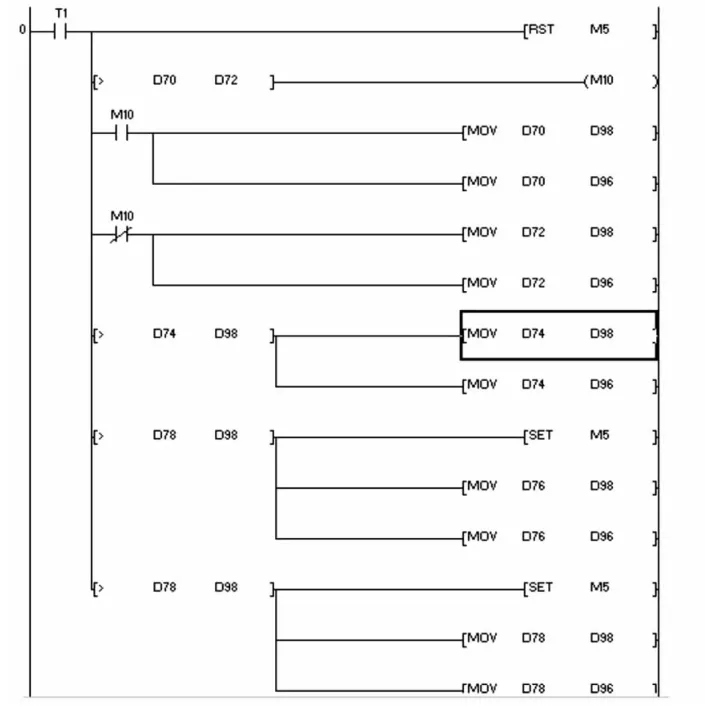
图4 解模糊程序Fig.4 Defuzzification procedure
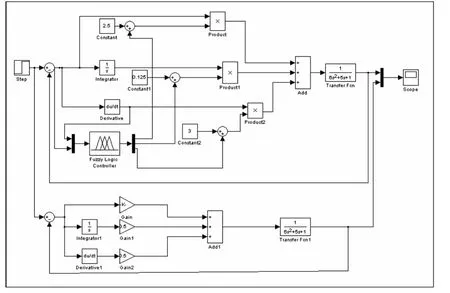
图5 仿真系统模型Fig.5 Simulation model
模糊PID的两个输入为E、EC.E和EC的论域范围均为[-15,15],Ki的论域范围为[-1,1],Kp的论域范围为[-5,5],Kd的论域范围为[-2,2].设每个语言变量都服从三角分布,因此可以得出各模糊子集的隶属度,以输入E、EC和输入Kp的隶属度函数为例,如图6所示.

图6 隶属度函数Fig.6 Membership functions
表1~3给出了由针对Kp、Ki、Kd三个参数分别整定的模糊控制表[3].
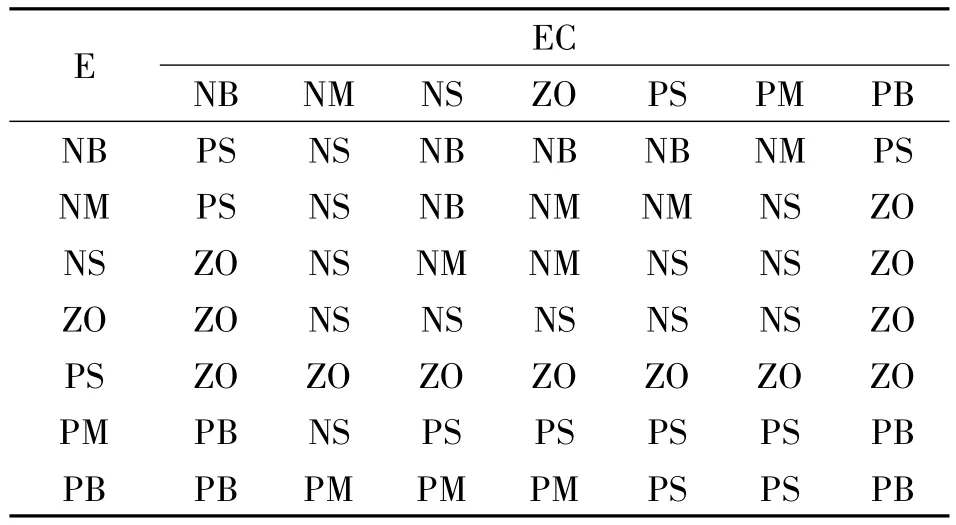
表1 KP的模糊查询表Tab.1 Fuzzy query table of KP
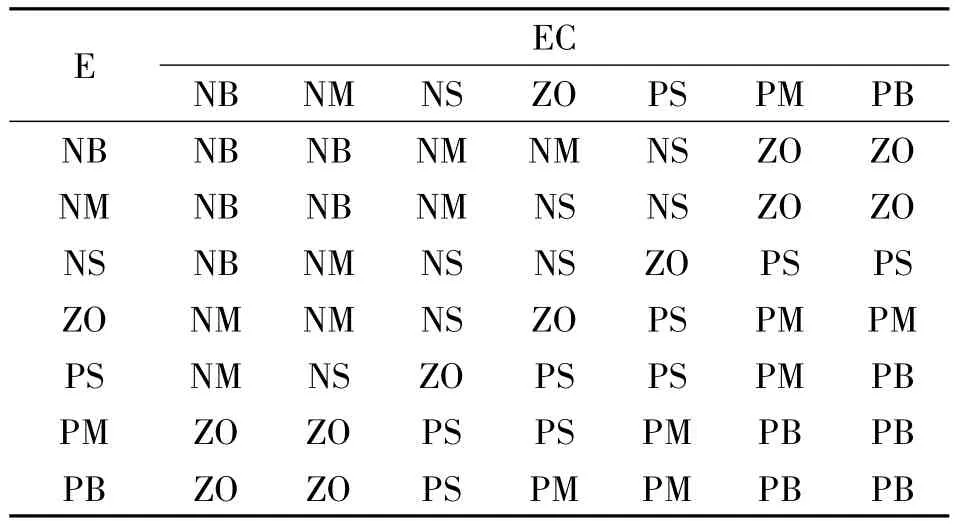
表2 Ki的模糊查询表Tab.2 Fuzzy query table of Ki
对于相应的模糊控制器的控制规则通常采用以下模糊条件语句,在Fuzzy工具箱中依照模糊查询表构建7×7=49条模糊规则.

E和EC分别为系统输出误差和误差变化,输出为Kp、Ki、Kd.
4 仿真结果与分析
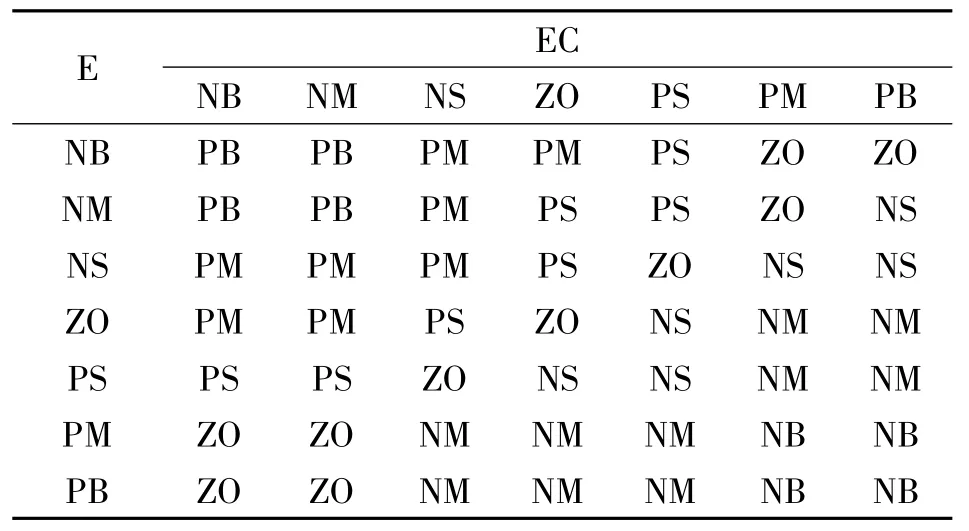
表3 Kd的模糊查询表Tab.3 Fuzzy query table of Kd
仿真波形如图7所示.从仿真结果可以看出,模糊PID控制的调节时间明显小于传统PID的控制,能够在很短的时间内收敛,模糊PID控制响应曲线的动态性能明显强于常规PID控制,系统的自适应能力较强.说明模糊PID控制有较好的动态性能.
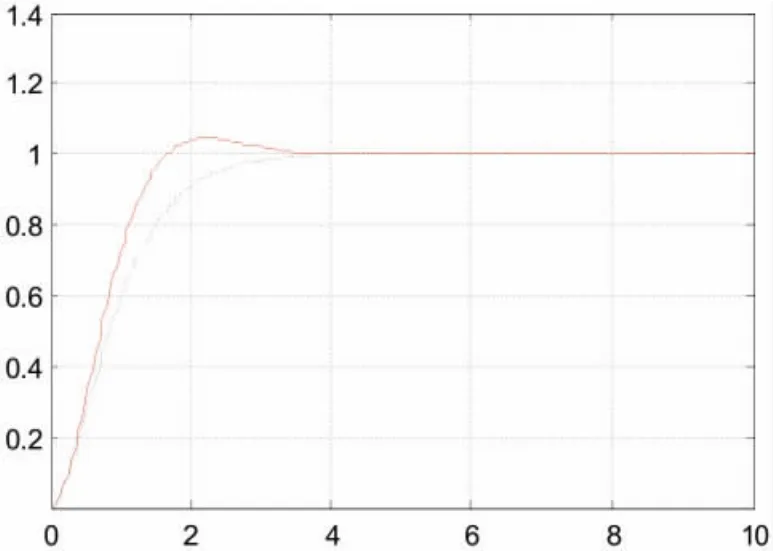
图7 模糊自适应PID及常规PID的响应曲线图Fig.7 Response curve of Fuzzy adaptive PID and conventional PID
[1]曾光奇,胡均安,王东.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[2]宋伯生.PLC编程实用指南[M].北京:机械工业出版社,2006.
[3]陈晓冲,王万平.常规PID控制和模糊自适应PID控制仿真研究[J].机床与液压,2004(2),12-16.
[4]李雪莲.PID模糊控制器结构研究[J].机械工程与自动化,2005(2):96-98.
[5]孙尔军.FX_(2N)PLC水轮机微机调速器的开发研究[D].南京:河海大学,2003.
[6]De Silva C W.Fuzzy Logic Applications[J].New York:CRC,1995(3):888-890.
[7]Wang L X.Adaptive Fuzzy Systems and Control,Design and Stability Analysis[J].New Jersey:PTR Prentice-Hall,1994(2):333-337.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
成都信息工程大学学报(2021年6期)2021-02-12
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
测控技术(2018年10期)2018-11-25
广东石油化工学院学报(2016年3期)2016-05-17
中国科技纵横(2015年2期)2015-11-05
体育科学研究(2015年5期)2015-02-28
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24