CVT式耦合系统的混合动力汽车电机起动发动机性能研究*
2014-07-12 16:42刘振军赵江灵秦大同崔荣宾
汽车技术 2014年3期
刘振军 赵江灵 秦大同 崔荣宾
(重庆大学机械传动国家重点实验室)
CVT式耦合系统的混合动力汽车电机起动发动机性能研究*
刘振军 赵江灵 秦大同 崔荣宾
(重庆大学机械传动国家重点实验室)
针对CVT式新型耦合系统混合动力汽车在模式切换过程中出现动力源输出扭矩波动过大的问题进行模式分析。划分工作模式区域,确定模式切换条件及相应动力源的目标扭矩。研究发动机和电机目标扭矩动力协调控制算法,制定模式切换过程中CVT速比控制策略。用Simulink搭建仿真模型进行仿真分析,并采用台架试验进行验证。结果表明,采用该扭矩协调控制策略能有效降低模式切换过程中的扭矩波动,提高了模式切换的品质。
1 前言
混合动力系统有多种工作模式,模式切换过程十分复杂。在车辆行驶过程中,需根据整车行驶状况进行工作模式切换,而切换过程中涉及到混合动力汽车的动态过程控制。如果控制不好,可能造成传动系统的动力中断或者扭矩波动,影响整车的动力性和平顺性。因此,在强混合动力汽车中,扭矩协调算法与模式切换控制策略已成为重要的研究内容。
国内不少学者对混合动力汽车工作模式切换中的动力源扭矩协调控制做了研究:王庆年等[1]采用基于逻辑门限值的能量管理策略,但是没有考虑对电机扭矩的控制;童毅等[2]提出了“内燃机扭矩开环控制+电机扭矩补偿控制”;侯献军等[3]采用了“稳态扭矩分配+发动机动态扭矩估计+电机扭矩补偿”的动态协调控制算法,但未考虑对变速器进行控制;杨阳等[4]研究了搭载AMT变速器的混合动力系统的模式切换;戴一凡等[5]研究的是搭载MT变速器的模式切换,而现在混合动力汽车发展的趋势是采用CVT变速器。
本文以新型的单电机、CVT式强混合动力汽车为研究对象,通过对系统构成和工作模式分析,结合发动机的特性与电机扭矩划分工作模式区域,制定模式切换策略。在此基础上,重点研究行进中电机起动发动机过程的动态扭矩协调控制策略,并进行仿真分析与台架试验。
2 强混合动力系统的组成及模式分析
2.1 系统组成
所研究的强混合动力汽车结构方案如图1所示。该系统的特点是只有一个汽车起动发电一体机(ISG电动机),并且搭载CVT变速器。发动机和电机之间通过湿式多片离合器与单向离合器连接。
耦合机构结构如图2所示。湿式多片离合器的使用使电机起动发动机的过程平稳可控,且能保证电机有足够的输出动力,不会发生动力不足或中断现象。单向离合器保证发动机起动完成后,其转速不高于电机转速,以实现发动机动力传递。
所设计的新型混合动力传动系统具有相对齐全的工作模式。在不同的运行工况下,动力传动机构根据混合动力车辆对传动系统的要求,实现不同模式下的系统运行。不同工作模式下的动力耦合机构的工作状态及特点如表1所列。单向离合器和湿式多片离合器的工作状态决定动力传递路径,而动力源的工作状态决定动力流动的方向,两者共同确定整车的工作模式。

表1 工作模式状态分析
2.2 模式分析
根据系统模型等效简图(图3),对各种模式进行耦合分析,为制定控制策略和建立仿真模型奠定基础。
图3中,Te为发动机扭矩;Tm为电机扭矩;Tcl为湿式多片离合器传递扭矩;T为等效到变速器输入端的阻力矩;We为发动机转速;Wm为电机转速;J1为系统湿式多片离合器前端的等效转动惯量;J2为系统湿式多片离合器后端的等效转动惯量。
a.纯电动工况:在需求扭矩较低的运行工况下,汽车以纯电动工况行驶;发动机不起动,湿式多片离合器分离,汽车所需要的动力由电机单独提供。此时:
Te=0,ωe=0,Tcl=0,Tm-T=J2·ω˙m(1)
b.发动机单独驱动:在此工况下,电机不输出扭矩,由发动机单独提供需求扭矩;由单向离合器接合传递扭矩,湿式多片离合器分离。此时:
c.联合驱动:汽车运行在此模式时,由发动机与电机共同输出扭矩来满足所需求的扭矩;单向离合器接合传递扭矩。此时:
d.行车充电:当电池需要充电时,发动机不仅需要提供车辆运行所需扭矩,还要提供充电扭矩;湿式多片离合器分离,单向离合器接合,电机作为发电机给电池充电,提供负扭矩。此时:
模式切换过程中,在发动机单独驱动、联合驱动、行车充电3种模式间切换中,不存在发动机的关闭与起动过程,易于控制。由纯电动切换到含有发动机驱动的模式时,需要利用电机起动发动机,输出扭矩容易产生较大的波动和冲击,所以应该重点考虑由纯电动工况起动发动机的控制(图4)。
由纯电动工况切换到发动机单独驱动分为3个步骤:
a.汽车工作在纯电动模式下(图4a),当湿式多片离合器接到接合指令,开始接合滑磨(图4b),主从动片有转速差。当离合器接合,发动机起动完成后,对发动机扭矩进行控制。
b.湿式多片离合器接合,单向离合器锁止,发动机开始输出力矩。此时,电机并没有立即退出工作,而是对发动机扭矩进行补偿(图4c),以避免产生扭矩波动,影响模式切换过程的平顺性。
c.湿式多片离合器断开,进入发动机单独驱动模式(图4d),动力由发动机经单向离合器传递。模式切换过程中有:
3 模式切换控制策略
3.1 工作模式运行区域的划分
在MAP图的基础上,结合电机的特性、发动机的经济性和动力性,保证电机在需要起动发动机时能够提供足够的起动扭矩和汽车行驶所需扭矩,而划分工作区域如图5所示。当汽车的工作区域越过发动机最小扭矩(Te_min)曲线时,有3种模式可以选择,但是不论要切换到什么模式,此过程都需要在行进中电机起动发动机。其中,Te_ch表示行车充电扭矩,Tm_ass表示电机功率辅助最小扭矩。
3.2 控制策略
当车辆起步时,电池SOC值大于SOClow,电量较为充足,使用电机做为动力源完成起步。若需求扭矩Td_req<Te_min,则汽车以纯电动工况运行。当需求扭矩Td_req>Te_min,从满足驾驶员的需求扭矩和维持电池SOC值的角度考虑,车辆需要由电机起动发动机。表2为纯电动模式切换到其它模式的切换条件和目标扭矩。通过协调发动机、电机的目标扭矩,最终实现发动机平稳、快速起动。其中,SOCmin和SOClow分别表示允许放电最小值和高效区下限值,Tch_req表示充电需求扭矩,Te_max表示发动机最大扭矩,Tm_max表示电机最大扭矩,ne_min表示发动机运行的最低转速。
纯电动模式切换至发动机单独驱动模式的切换控制流程如图6所示。

表2 模式切换条件及目标扭矩
纯电动模式时电机和发动机的初始目标扭矩为:
式中,Te_tar为发动机目标扭矩;Tm_tar为电机的目标扭矩。
对目标扭矩的控制大致分为3个阶段:
第1阶段:当离合器开始接合时,对电机目标扭矩进行控制,其大小与需求扭矩及离合器传递扭矩有关:
第2阶段:在此过程中发动机在电机拖动下转速上升,直到发动机点火起动,整个过程发动机不对外输出有效功率。
其中,t是时间变量,初值是0,逐渐增加到0.3 s,发动机的目标扭矩也由0逐渐增加到整车的需求扭矩。时间系数t还起到延时0.3 s的作用,可以使发动机的目标扭矩平稳增加,减小突变。
第3阶段:发动机此时已经起动,但电机并没有退出工作,而是在发动机起动后的一段时间内继续工作,系统进入短时混合驱动工作模式,以保证扭矩输出的平稳性,直至电机关闭。
当发动机的扭矩差值进入允许范围时,此时电机退出补偿,进入发动机单独驱动模式,模式切换完成,此时有:
3.3 CVT速比的控制方法
3.3.1 理想速比控制
a.纯电动模式
当电机运行转速小于某设定转速时,为保持整车有足够的驱动力,此时CVT的速比为最大速比2.432。
当电机转速大于某设定转速时,为更好的实现电机模式与发动机模式平稳衔接和过渡,且切换完成后,CVT目标速比不发生突变,将电机等效为发动机运行模式,并使其运行在等效发动机最佳经济状态或最佳动力状态。
b.发动机单独驱动模式
根据发动机特性图,通过数据拟合,找出经济模式或动力性模式时发动机的油门开度与对应转速的关系,求出对应油门开度下的发动机目标转速ne,再求出目标速比im:
式中,v为实际车速;i0为主减速器速比;rt为车轮半径。
3.3.2 PID控制
速比控制过程实质是CVT速比变化率的控制过程。合理的确定速比变化率是CVT速比匹配的关键,其将直接影响到汽车的加速性能和加速时的平顺性[10]。速比变化率为:
式中,k1、k2、k3分别为比例、积分、微分增益。
4 仿真
在MATLAB/Simulink仿真平台上建立整车模型并进行仿真分析,研究CVT式混合动力汽车由纯电动工况起动发动机的特性。汽车由纯电动工况切换到发动机单独驱动工况的仿真结果如图7所示。
由图7可知,初始时电机输出扭矩约为55 N·m,汽车处于纯电动模式。随着加速踏板开度由17%增加到40%,需求扭矩增加,达到模式切换条件,需要起动发动机。汽车在5.8 s接到起动发动机指令,增加电机的目标扭矩,电机的输出扭矩也快速响应,在7.8 s时电机输出扭矩达到最大值(109 N·m)。当湿式多片离合器完全接合时,发动机此时可以输出一部分扭矩。但由于发动机扭矩响应会有一定的延迟,因此电机并没有立即退出工作,而是在减小的同时补尝扭矩不足的部分,使总输出满足需求扭矩。发动机在7.8 s开始输出正扭矩,在7.9 s湿式多片离合器完全接合,电机扭矩逐渐减小至0。
纯电动模式CVT速比为2.54,在8 s时开始变化,在12 s时速比趋近于1。整个模式的切换时间为2.2 s,过程中冲击度最大值为8 m/s3。在模式切换的过程中电机转速也出现较小幅度下降,而后由于发动机扭矩及转速的升高,电机转速在单向离合器的带动下提升。仿真结果表明,该扭矩控制策略能满足发动机的经济性,有效降低行进中起动发动机的冲击度。
5 试验
在仿真过程中,发动机的动态扭矩是在稳态输出基础上进行相应延迟而得到的,忽略了系统的弹性及阻尼特性的影响,存在一定误差。当单向离合器接合时,发动机、电机等部件均认为是刚性连接,与实际情况也有一定误差。为了验证该单电机、CVT式混合动力系统结构是否合理,能否顺利完成由纯电动工况起动发动机的过程,控制策略能否有效降低冲击度,对其进行台架试验,试验台架原理如图8所示,其中BCM为电磁控制器,MAB为电机控制器,IPU为集成组合动力装置。
台架试验主要是为了验证模式切换的平顺性,并没有考虑其经济性和动力性。设置测功机处于道路阻力模拟状态下,通过驾驶操作分别将车速控制在10 km/h、15 km/h、20 km/h、25 km/h,试验结果如表3所列。
由表3可知,在测功机处于道路阻力模拟状态、不同车速时,能顺利实现模式切换。通过试验发现,速比越小,电机补偿扭矩越大,车速越大,发动机的水温越高。电机转速波动和冲击度的波动在中等挡位时比较小。
台架试验说明,该控制策略能顺利完成行进中电机起动发动机的过程;仿真分析和台架试验均表明,采用所制定的扭矩协调控制策略能有效降低冲击度,满足平顺性要求,所建立的模型较为合理。
6 结束语
a.对一种新型耦合系统的CVT式混合动力汽车进行模式分析,划分了工作模式区域,制定了模式切换中发动机与电机的扭矩协调控制策略。
b.以整车经济性和平顺性为重点,制定了CVT速比控制策略。
c.对由纯电动起动发动机的过程进行仿真分析与台架试验表明,台架试验结果与仿真结果一致,电机对扭矩的补偿减小了状态切换过程中总需求扭矩的波动,提高了控制效果。
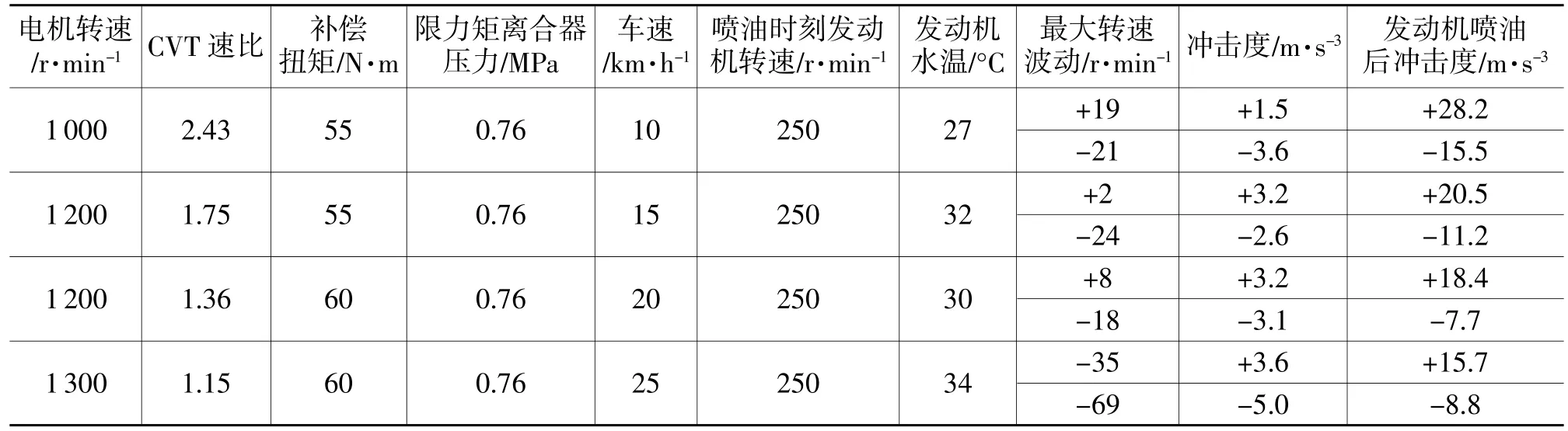
表3 不同车速条件下试验结果
1王庆年,赵子亮,刘东秦,等.并联混合动力汽车控制策略与仿真分析研究.机械工程学报,2005,1(12):13~18.
2童毅,欧阳明高,张俊智.并联式混合动力汽车控制算法的实时仿真研究.机械工程学报,2003,39(10):156~161.
3侯献军,杜常清,颜伏伍,等.混合动力系统状态切换技术研究.内然机工程,2009,30(16):72~76.
4杨阳,杨文辉,秦大同,等.强混合动力汽车驱动模式切换扭矩协调控制策略.重庆大学学报,2011,34(2):74~81,94.
5戴一凡,罗禹贡,边明远,等.单电机强混合动力车辆控制策略.中国机械工程,2010,21(7):120~124.
6常城,周雅夫.混合动力电动汽车的建模与仿真研究.机械设计与制造.2009,216(02):134~136.
7李红朋,秦大同,杨阳,等.汽车发动机起动过程的动力学仿真.2005,28(6):4~8.
8侯献军,杜常清,颜伏伍.混合动力系统状态切换技术研究.内燃机工程,2009,30(6):72~76.
9黄伟.基于CVT的四轮驱动混合动力汽车传动控制策略研究:[学位论文].长沙:湖南大学,2008.
10周乃威.无级变速混合动力汽车动力耦合及速比控制研究:[学位论文].长春:吉林大学,2009.
(责任编辑晨曦)
修改稿收到日期为2013年5月24日。
Performance Study of Motor Starting Engine of CVT Hybrid Vehicle with New Coupling System
Liu Zhenjun,Zhao Jiangling,Qin Datong,Cui Rongbin
(State Key Laboratory of Mechanical Transmission of Chongqing University)
To troubleshoot the oversized output torque ripple of power source during mode switching of CVT hybrid vehicle with new type coupling system,we make mode analysis by dividing operating mode area and define mode switching conditions and target torque of corresponding power source.By studying power coordinated control algorithm of engine and motor target torque,we develop CVT speed ratio control strategy during mode switching.We use Simulink to establish simulation model for analysis and verify with bench test.The results show that this coordinated torque control strategy can effectively reduce torque ripple during mode switching,and improve mode switching quality.
Hybrid electric vehicle,CVT coupling system,Coordinated torque control, Mode switching
混合动力汽车CVT式耦合系统扭矩协调控制模式切换
U469.72
:A
:1000-3703(2014)03-0049-05
(国家自然科学基金)干式双离合器耐久性设计理论与控制方法研究(基金号:51075412)。
猜你喜欢
汽车实用技术(2022年6期)2022-04-02
能源工程(2021年6期)2022-01-06
内燃机与配件(2020年3期)2020-09-10
北京汽车(2019年3期)2019-07-19
中国科技纵横(2018年13期)2018-08-31
汽车维修技师(2017年9期)2017-02-04
山东工业技术(2016年10期)2016-06-14
汽车工程(2016年11期)2016-04-11
科技与企业(2015年15期)2015-10-21
汽车维修与保养(2015年12期)2015-04-18