基于安全视距和PD控制的汽车前照灯随动控制策略的研究*
2014-07-12 16:42王琼李家侃孙保群赵晨
汽车技术 2014年3期
王琼 李家侃 孙保群 赵晨
(合肥工业大学)
基于安全视距和PD控制的汽车前照灯随动控制策略的研究*
王琼 李家侃 孙保群 赵晨
(合肥工业大学)
针对国内汽车前照灯随动系统方面以理论研究为主而缺少工程应用开发的问题,对汽车前照灯水平随动系统的控制策略进行研究。建立数学模型,提出基于安全视距的角度算法,结合法规标准对角度算法进行条件限制,并通过PD算法对角度进行闭环控制,最后依控制策略制作系统样机并进行算法仿真试验和实车模拟试验。试验结果表明,该控制策略满足系统对实时性和误差的要求,并满足AFS法规的要求。
1 前言
自适应前照灯系统(Adaptive Front-lighting System,AFS)是一种能够根据路况、环境变化和汽车行驶状态对汽车前照灯进行水平和垂直方向调整的灯光随动系统。在水平方向上,其可以使灯光与汽车行驶方向保持一致,提供更合适的照明范围,使驾驶员能在夜间看清弯道处的路况,从而有效提升夜间行车安全[1]。
AFS技术在国外已日趋成熟,美、欧、日、韩等国多个知名汽车厂商都已经推出了自己的AFS并作为中高档汽车的标准配置。然而,国内的研究还处于技术引进消化的起步阶段,没有形成具有自主知识产权的核心技术,而且多以理论研究为主,缺少实际工程应用系统的研发,许多理论模型应用到实际中并不能满足系统要求[2]。
如何建立控制策略始终是汽车电子控制系统的核心技术,同样,也是实现AFS功能的基础。AFS系统有两个问题急需解决:一是AFS动力学模型仅给出了理论模型,其理论算法与实际情况多有不符;二是如果将理论转角直接作用于步进电机,必定存在误差而影响系统的稳定性。针对这些问题,本文提出了一种基于安全视距的角度算法和基于比例、微分算法(PD算法)控制的角度控制策略,并在试验样车上进行试验验证。
2 系统整体实现方案
所设计的AFS由传感器单元、中央控制单元和执行单元3大部分组成,系统整体结构如图1所示。
车速传感器采集的车速信号以及转向盘转角传感器采集的转向盘转角信号送入中央处理器中的角度算法模块中进行处理,得出前照灯目标转角后通过两个混合式高速步进电机实现前照灯水平转动,并通过霍尔式位置传感器反馈的实际转角值对角度进行闭环PD算法控制,在减小系统误差的同时加快了系统的响应时间。
3 系统控制策略
3.1 角度算法
汽车行驶中,驾驶员的操控都是基于个人反应进行的,在做出决策的过程中驾驶员的经验占很大比例,因此对前照灯水平随动转角很难通过建立精确的数学模型进行计算[3]。车辆在弯道行驶时,驾驶员从看到障碍物时起至采取紧急制动使车辆安全停车所需的最短距离称为最小安全视距。通过引入最小安全视距的概念,建立基本的弯道数学模型,以精确计算保证汽车安全行车的最小前照灯转角。另外在AFS法规中,为了保证车辆正前方的照明和对面车辆的防炫目等要求,规定了前照灯的最大转角。由此可以得到保证车辆在弯道安全行驶的前照灯转角范围。通过对驾驶员的行为经验分析,驾驶员理性驾驶时,在弯道驾驶中看到对面车辆或者障碍物时会采取减速避让的方法,这就要求前照灯随动后能够提供安全的照明范围[4]。
3.1.1 最小转角
最小安全视距下前照灯需要转动的角度就是保证最小安全视距的角度。不考虑车身长度、轮距和大灯水平安装位置的影响,车辆转弯时前照灯水平方向偏转的简化模型如图2所示。
图2 中,L表示车辆采取紧急制动停车情况下在弯道中行进的距离,λ是前照灯原水平投射覆盖角,γ为车灯偏转后水平投射覆盖角,θ=γ-λ为前照灯实际偏转角,R是转弯半径,由图2中几何关系可得:
车辆最小安全视距为L对应的弦长,当以L替代车辆的最小安全视距时是偏安全的。L包括反应距离和制动距离两部分,其公式为:
式中,v是车速;t是反应时间;vt是反应距离;s是车辆实际制动距离。
转弯半径可根据阿克曼转向原理得到:
式中,β是外侧转向轮偏转的角度;L轴是汽车轴距。转向盘转角与车轮偏转角的关系为:
式中,K是车辆转向特征系数;α是转向盘转角。综合上述各式可得车灯转角公式为:
在角度算法的实现中所选择的试验参数取自斯柯达昊锐车型的相关参数,取L轴=2.7 m;转向系数K=30;反应时间t=2 s。不同车速下车灯转角算法的Matlab仿真结果如图3所示。
从图3中可以看出,在相同的转弯半径下,汽车行驶速度越快,车灯转角越大;在相同的行驶速度下,汽车转弯半径越小,车灯转角越大。
3.1.2 最大转角
联合国欧洲经济委员会汽车法规(ECE)在R123标准中规定,汽车AFS前照灯的光轴与汽车拟行驶轨迹的交点到汽车前端距离的最大值为100倍系统安装高度[5],则最大转角公式为:
式中,H代表汽车车灯的安装高度,本设计中取H= 0.68 m。
3.1.3 转角取值方案
结合ECE法规要求,对转弯半径与车灯转角的关系进行仿真,仿真结果如图4所示。由图4可知,当车速分别为20 km/h、40 km/h、60 km/h时,最小转角曲线低于法规曲线;而当速度为80 km/h、100 km/h时,最小转角曲线高于法规曲线。
选择车速60 km/h和77 km/h作为参考,对该车速下转向盘转角和车灯转角的关系进行仿真,见图5。仿真结果显示,当车速为77 km/h时,最小转角曲线与法规允许的最大转角几乎重合;当车速为60 km/h时,最小车灯转角与法规允许的最大转角间有着较大的富裕。
因此,当车速小于77 km/h时,选取两个曲线的平均值作为前照灯目标转角参考输出值。当车速大于77 hm/h时,选取法规曲线作为最终前照灯转角参考输出值。
确定参考目标转角后,本系统在光学模拟软件lucidshape平台上进行配光检测,依照AFS法规的配光标准对角度进行微调,以满足弯道随动系统法规的配光要求。
3.2 PD算法角度控制
汽车在行进过程中,由于外界因素(车辆的转向、颠簸)、内部因素(步进电机的丢步和越步等)会对其前照灯角度的精确控制造成影响。为了达到较好的角度控制效果,本系统采用比例、积分、微分算法(PID算法)的简化算法即PD算法对前照灯旋转角度进行调节控制,通过合理的设置控制参数,在缩小系统误差的同时也加快了响应时间。
前照灯随动系统是一个高实时性的动态控制系统,要求系统能够快速输出响应并具有稳定性和可靠性。为了提高系统控制精度,设计中采用比例调节器减少偏差。同时,车灯转角的偏差还有可能会受外界因素影响而变化,导致系统不稳定,设计中引用微分调节器可以改善系统的动态性能。由于PID算法中积分调节器虽然能消除静态误差,但是会损失响应时间,而系统角度的控制允许存在一定的误差,所以设计算法中省去了积分调节器[6]。PD算法角度控制原理框图如图6所示。
PD算法首先将霍尔位置传感器测得的实际转角值与系统目标转角值相减得到角度误差,然后对误差进行PD算法控制,最后将控制量输出给步进电机,完成对步进电机的控制。
本系统采用数字PD算法控制,该控制是以连续系统PD控制规律为基础,然后再将其数字化,写成差分方程为:是积分系数;Kp为比例调节系数;Ts为采样周期;Td为积分时间;e(k)=x(k)-y(k)为第k时刻的输入目标转角与输出实际转角的差值;u(k)为步进电机需要转动的步数即驱动步进电机的PWM脉冲个数。
由于步进电机的步数和转角的关系未知,因此需要通过试验合理的设置参数Kp、Kd值,以达到系统对误差和响应时间的要求。在参数整定中采用试验凑试法,具体整定步骤为“先比例,再微分”。系统参数选取的原则,是在保正系统稳定的前提下尽可能增加比例参数以减小响应时间。经过试验凑试,最终确定的参数值为Kp=20,Kd=0.8。
确立参数Kp、Kd后,将PD调节算法用C语言程序实现,PD算法程序流程图如图7所示。
4 试验结果及分析
根据控制策略设计制作前照灯随动系统的样机,并设计编写角度算法和PD控制算法的程序,在样机平台上进行实车模拟试验。试验技术参数见表1。
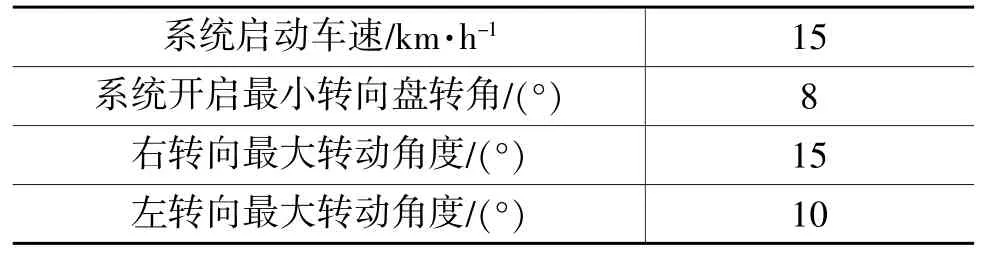
表1 试验技术参数
在上述参数限定下,选取汽车进入左弯道的情况作为试验条件,选取几组特定的转向盘转角和车速值作为系统输入,得到前照灯系统角度控制算法的仿真试验结果如图8所示。
前照灯系统角度控制算法样机运行试验数据如表2所列。
根据试验结果可知,前照灯转角的最大误差为0.6°,系统角度相应时间为40 ms,满足系统的误差和响应时间的要求,符合AFS的使用标准。
5 结束语
夜间弯道随动功能是AFS最重要的功能,通过对随动系统控制策略的研究,确定系统的角度算法和PD算法角度控制的解决方案。理论分析及样机试验表明,所建立的控制策略能够满足系统要求,能够有效提高驾驶员的可视范围。
1崔惠中,关志伟.智能前照灯系统(AFS)研究现状综述.天津工程师范学院学报,2008(3):47~50.
2郑志军.智能前照灯系统的发展.中国照明电器,2006(6): 8~11.
3李礼夫,邓前.汽车自适应前照灯的夜间转弯特性的研究.照明工程学报,2010(4):32~36.
4戎辉,龚进峰,曹健.自适应前照灯运动学建模及系统开发.汽车工程,2008(30):35~39.
5ECE R123 Revision 1.Uniform Provisions Concerning The Approval OfAdaptive Front-Lighting Systems(AFS)For Motor Vehicles.2007.
6左萃.汽车智能前大灯系统控制策略及仿真研究:[学位论文].长沙:长沙理工大学,2012.
(责任编辑晨曦)
修改稿收到日期为2013年12月1日。
Research of Follow-up Control Strategy of Automotive AFS Based on Safety Sight Distance and PD Control
Wang Qiong,Li Jiakan,Sun Baoqun,Zhao Chen
(Hefei University of Technology)
In China,the automakers mainly focus on theoretical research in automotive AFS follow-up system, which lacks engineering application development.To solve this problem,this paper studies control strategy of the automotive AFS follow-up system.We build a mathematical model,and present angle algorithm based on the safety sight distance,and combine with regulations and standards to restrict angle algorithm conditions,and use PD algorithm to close-loop control angle.Finally we build a system prototype in accordance with this control strategy for algorithm simulation test and vehicle simulation test.Test results show that this control strategy meets real-time and error requirement of this system,and satisfies requirement of AFS regulations.
Headlamp,Follow-up strategy,Safety sight distance,PD control
前照灯随动控制策略安全视距PD控制;
U463.65+1
A
:1000-3703(2014)03-0059-04
国家自然科学基金,项目编号:51205101。
猜你喜欢
汽车维护与修理(2022年1期)2022-06-28
中国计算机报(2020年9期)2020-03-25
小资CHIC!ELEGANCE(2019年20期)2019-07-02
汽车维护与修理(2018年7期)2018-10-13
科技视界(2018年8期)2018-06-08
中国建筑金属结构(2018年4期)2018-05-23
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
汽车维护与修理(2016年4期)2016-11-26
汽车零部件(2014年7期)2014-06-23