自动紧急制动系统行人测试场景的研究
2014-07-12 16:42刘颖贺锦鹏刘卫国朱西产李霖江丽君
汽车技术 2014年3期
刘颖 贺锦鹏, 刘卫国 朱西产 李霖 江丽君
(1.同济大学;2.吉利汽车研究院有限公司)
自动紧急制动系统行人测试场景的研究
刘颖1贺锦鹏1,2刘卫国2朱西产1李霖1江丽君1
(1.同济大学;2.吉利汽车研究院有限公司)
为建立适用于我国交通状况的AEB行人测试场景,参考国际上已有的研究成果,首先采集了上海道路中的典型行人危险工况,并筛选出52例车与行人冲突的工况样本,然后利用聚类分析的多元统计学方法对这些样本进行分析,得到了5类具有典型特征的危险场景;根据这些典型危险场景设计了兼容我国交通工况的AEB行人测试场景,并建立相应的PreScan仿真模型。通过PreScan仿真测试可在未进行实际场地测试前对AEB系统进行初步评价,进而降低开发成本。
1 前言
AEB(Autonomous Emergency Braking,AEB)是通过自动制动来避免碰撞或减轻碰撞伤害的主动安全系统。Euro-NCAP的研究结果表明,27%的事故都可通过AEB避免[1],因此,AEB得到了有关各方的高度重视。Euro-NCAP将在2016年引入对AEB行人系统(AEB Pedestrian System)的评价。
AEB的场地测试能够以较少的成本在短时间内集中复现真实道路中的典型危险工况,以验证和评价AEB系统的有效性。目前一些机构已经开始进行AEB行人测试场景的研究[2],但是,由于各国和地区的驾驶环境以及驾驶员的驾驶习惯存在差异,国外的测试场景并不能完全适用于我国,为此,根据在我国典型道路上采集的危险工况,通过聚类分析法设计了适合我国交通工况的AEB行人测试场景。
2 现有行人测试场景研究
目前,欧洲的vFSS(Advanced Forward-Looking Safety Systems)项目通过对GIDAS(German In-Depth Accident Study)、UDV(German Insurers Accident Research)、AZT(Allianz Technology Center)和DEKRA(Deutscher Kraftfahrzeug überwachung-sverein)事故数据库的研究设计了4个AEB行人测试场景,场景参数如表1所列[3];AEB Group将英国的两个事故数据库STATS19(National Accident Database)和OTS(In-depth On-the-spot Study)分别进行聚类分析,得到了类似的聚类结果,并据此设计了AEB行人测试场景,场景参数如表2所列[4]。
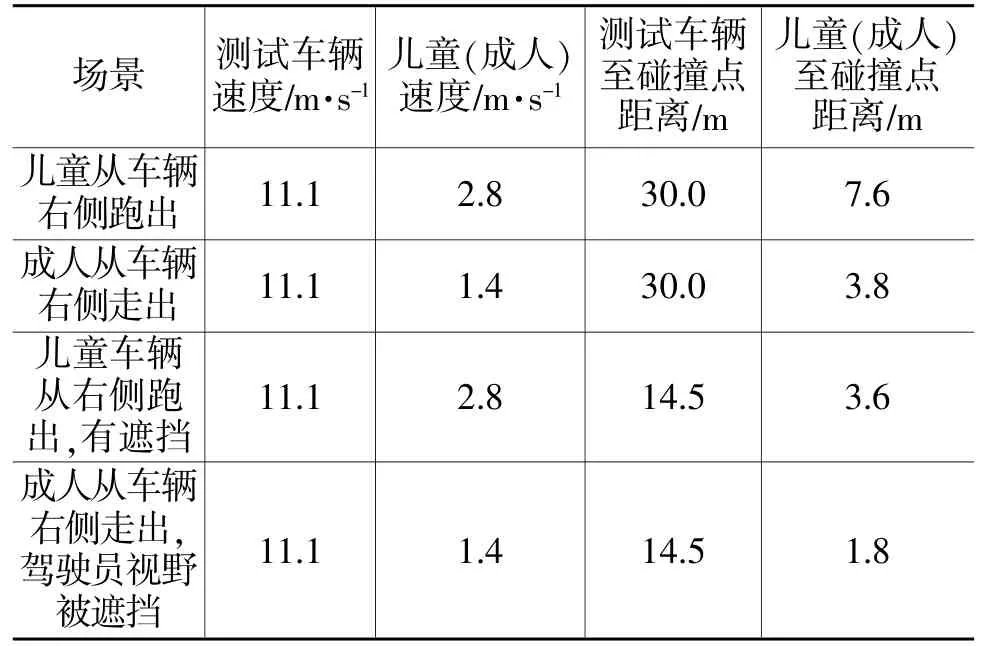
表1 vFSS测试场景参数
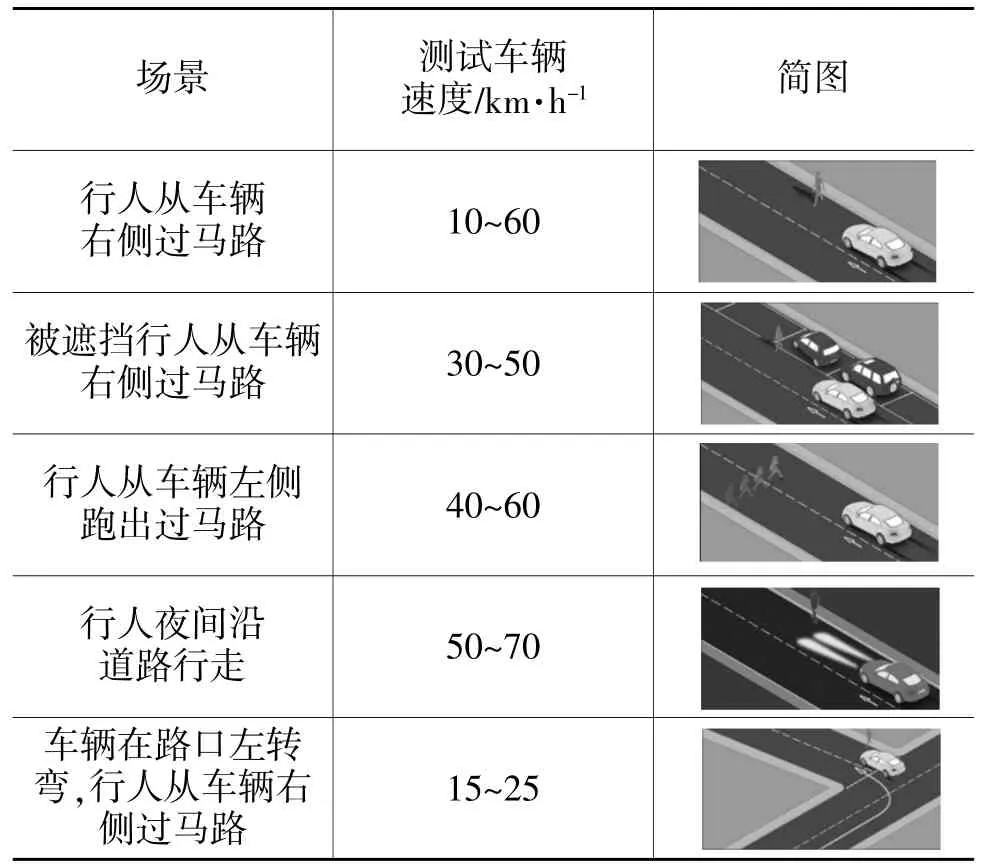
表2 AEB Group测试场景参数
上述测试场景仅根据欧洲国家的事故数据库分析得到,仅代表当地的典型危险工况,而且事故重建过程也会引入较大误差,所以各测试场景定义方式各不相同,运动学参数存在较大差异。但是它们都包括了测试车辆速度、行人运动方式和驾驶员视野是否被遮挡等关键参数。
3 危险工况的数据采集和筛选
试验用行驶记录仪采集数据,该行驶记录仪在瞬时加速度大于0.4 g时触发,并记录触发前15 s到触发后5 s的时间段内车辆行驶方向速度、三向加速度和前方视野的录像(不包括声音),数据采集设备和数据显示界面如图1所示。试验时将行驶记录仪装载在4辆出租车和1辆警车内部,在上海市嘉定地区行驶约1年,共采集约4 000例工况样本。收集数据后,按照NHSTA(美国国家高速公路交通安全管理局)在2007年发布的避免碰撞研究中使用的37种危险工况分类方法[5],将采集到的危险工况分类,并选取其中车和人发生冲突的52例危险工况样本用于试验研究。
4 危险工况聚类分析
4.1 参数选取
通过分析行驶记录仪采集到的行人危险工况样本的录像信息和车辆运动学数据,可得到大量的相关参数,由于这些参数中有些不会对驾驶员行为或AEB的传感器造成影响,因此不能全部用于聚类分析。为此,参考国外提出并已采用的AEB行人测试场景参数,初步确定聚类分析参数的选取范围包括环境参数、测试车辆参数和行人参数。环境参数指天气、照明情况、交通状况、道路形状等;测试车辆参数指车的运动情况、视野是否有遮挡、遮挡类型、遮挡位置、危险起始点和结束点的时间、测试车辆速度、测试车辆与行人的距离等;行人参数指行人的运动情况、速度和类型。
经初步统计后每个样本都被抽象为各参数不同变量值的组合,各变量样本数量的统计分布如图2所示。经分析,其中的一些参数不适合用于聚类分析,如图2a中的天气、行人速度和行人类型等3个参数中同一个变量(晴、走、成人)的分布占样本总数的85%以上,差异性不明显,所以不用于聚类分析,但是在设计更具体的测试场景时可以作为参考。由于图2a中“交通状况”的“正常”样本比例较高,在测试时较难模拟测试车辆周围其它车辆的运动状态,而且需要的设备较多,成本高,因此不适合选作测试参数。
此外,相似或细化的参数只为场景的设计提供借鉴,不作为主要参数用于聚类分析,如“道路形状”与“测试车辆运动情况”存在关联性,若同时用于聚类分析会增加权重,因“测试车辆运动情况”对危险有更本质的影响,所以选作聚类分析使用的参数;遮挡物类型和遮挡位置是针对驾驶员视野被遮挡的样本,是对驾驶员视野有遮挡样本的更具体的统计,可用于驾驶员视野被遮挡的场景中遮挡物的选择和摆放位置的设计。
从初步确定的参数中去掉不适合进行聚类分析的参数,最终确定用于聚类分析的参数包括照明情况、测试车辆运动情况、驾驶员视野是否有遮挡、行人运动情况(图2b)、危险起始点时测试车辆速度、测试车辆与行人的距离等。
4.2 聚类分析
采用系统聚类法统计危险工况能使同一类中对象之间的相似性比与其它类对象的相似性更强,大大降低了主观意识对类别的影响,而且可重复性强。首先,将n个样本看成n类(一类包含1个样本),然后将距离最接近的两类合并成一个新类,得到n-1类,再从中找出最接近的两类加以合并变成n-2类,以此类推,直至得到所需要的类型数量为止[6]。
聚类过程中距离的计算包括变量之间的距离、样本之间的距离和类之间的距离等3个层级。
a.变量之间距离的计算。聚类分析中参数的类型主要有3种[7],见表3。由表3可知,不同类型参数的变量之间距离的计算略有不同:对于间隔尺度与有序尺度参数,变量之间的距离是差值的绝对值,如表3中“照明情况”的“好”与“不好”之间的距离为1,“危险起始点测试车辆速度”中变量“24”与“75”之间的距离为0.6;对于名义尺度参数,不同变量之间的距离为定值,相同变量之间的距离为0,如“行人运动情况”中变量“沿马路走”与“左侧过马路”之间的距离为1。
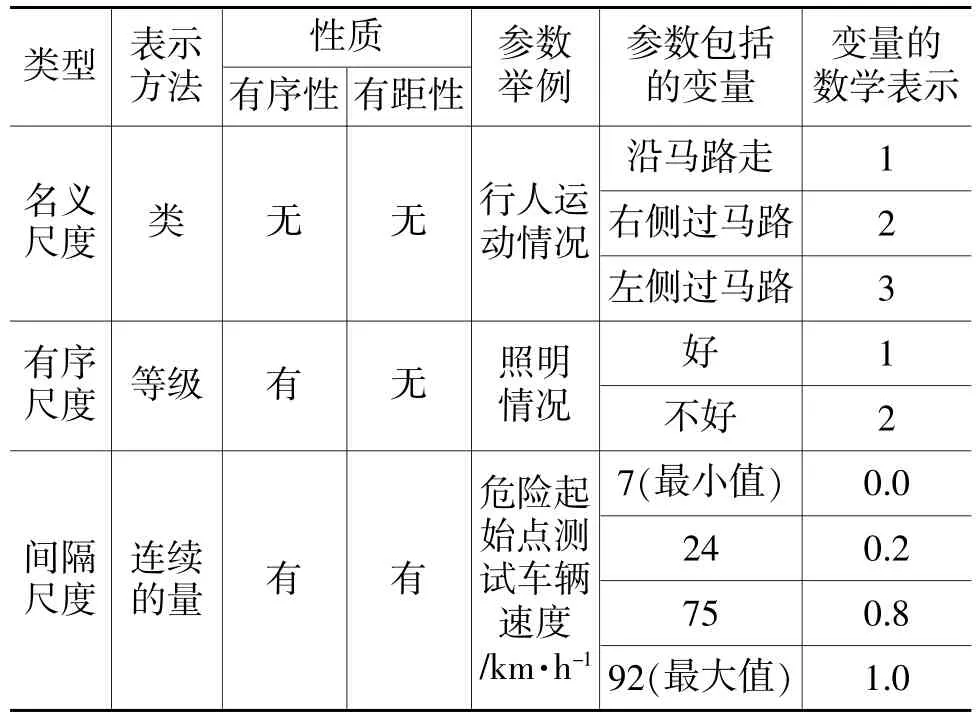
表3 参数类型及其说明
b.样本之间距离的计算。样本之间距离的计算采用绝对值距离。设X1,X2,…,Xn为取自p元总体的样本,第i个样本Xi=(xi1,xi2,…,xip)(i=1,2,…,n),则第i个样本Xi与第j个样本Xj之间的距离dij[7]为:
c.类之间距离的计算。采用类平均法计算类之间的距离,即类与类之间距离的平方是样本对之间距离平方的平均值。用G表示类,G中有m个样本,则K类(Gk)与L类(GL)之间距离DKL的平方[7]为:
利用MATLAB软件对统计数据进行聚类分析,最终得到的聚类分析样本数量分布结果如表4所列。其中,前4类工况总数为50,占所有工况的96%。表4中深色区域表示经卡方检验(90%确信度[8])某类别样本数量分布与总体样本数量分布偏差较大的变量。图3和图4为各类别中危险起始点测试车辆速度及测试车辆与行人距离的分布情况。
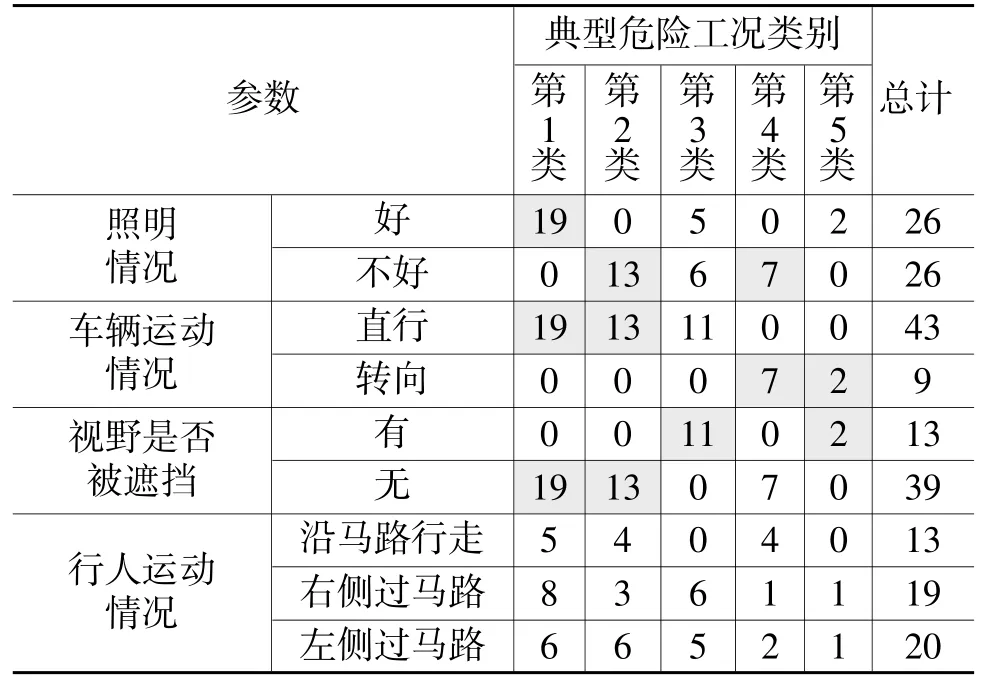
表4 聚类分析样本数量分布
4.3 结果分析
从图2可看出,大部分危险工况发生在“晴天”、“交通正常”的情况下,而且行人大部分为以正常速度“行走”的“成人”,与正常情况下实际道路交通情况基本类似,说明“雨天”、“儿童”或“行人运动速度较快”在实际道路中引起危险的可能性不是很大,但有可能引起较为严重的危险。此外,照明情况“好”和“不好”的样本各占1/2,而实际中照明良好情况下行车次数较多,所以照明情况不好时危险发生频率偏高。危险工况中“转弯”时发生危险的样本不多,因此转弯不是危险发生的主要原因。危险发生前行人“被遮挡”的比例达到1/4,说明驾驶员视野被遮挡会引起危险,进一步的统计分析显示,69%的遮挡物位于左前方或右前方,正前方遮挡物引起危险的情况较少;63%的遮挡物是小型车辆。行人“过马路”比“沿机动车道行走”更容易导致危险,而且从左侧或右侧过马路引起危险的概率基本相同。
由表4、图3和图4可知,聚类分析中第1类样本数量占样本总数的比例最大,为37%,表明在照明条件良好、测试车辆直线行驶且行人没有被遮挡的工况下,行人运动情况各变量的样本数量分布与整体行人运动情况各变量样本数量的分布相似,无明显差异,测试车辆速度大部分在10~40 km/h内,测试车辆与行人距离在5~40 m范围内。第2类样本数量占总样本数量的25%,与第1类的条件基本相同,但是照明情况不好,而且样本中测试车辆速度及测试车辆与行人的距离大部分为10~55 km/h和5~55 m内。第3类表示行人过马路且驾驶员视野被物体遮挡的工况,测试车辆速度及测试车辆与行人的距离分布与第1类相似,分别为10~45 km/h和5~40 m。第4类中测试车辆是转向行驶,行人沿马路行走,且照明条件差,样本中测试车辆速度及测试车辆与行人的距离分布都偏低,大部分为5~25 km/ h和2~15 m。第5类样本虽少,但特征明显,与前4类的差异很大,代表测试车辆转向且驾驶员视野被遮挡的危险工况。此类样本少的原因可能是总体样本偏少,而此类危险实际发生的概率又偏低所致。
5 测试场景设计和仿真
根据上述实际道路危险工况样本和聚类分析结果,设计了4类用于行人AEB的测试场景,由于最后一类聚类结果所占比例较少,所以不作为测试场景。
测试场景设计参数如表5所列。其中,照明条件、测试车辆运动、驾驶员视野是否被遮挡和行人运动等参数依照聚类结果设计;根据分析阶段遮挡物类型和位置的分布,测试场景3中的遮挡物主要为小型乘用车;测试车辆速度是将聚类结果中差异较大的测试车辆速度去除并作适当圆整得到;测试车辆与行人距离是将聚类结果中差异较大的距离去除后剩余样本的均值;参考国外的研究结果,行人速度定为5.4 km/h。
PreScan是荷兰TNO公司开发的一款为汽车智能系统提供设计、验证和评价环境的仿真软件,利用PreScan可以快速建立场景(自然环境,交通环境)、添加传感器、定义车辆运动学和动力学模型等,并与Matlab/Simulink交互使用,也可以在Simulink模型中添加自定义的控制算法。

表5 测试场景设计参数
本研究利用PreScan模拟AEB测试的建模过程主要包括以下4个步骤。
a.在GUI(Graphical User Interface)界面中设置光照、环境温度、能见度等环境参数;从元素库中选取适当的道路、车辆和行人并设置参数。
b.定义测试车辆和行人的运动。车辆的驾驶模型选择路径跟随(PathFollower)模式,轨迹在GUI中赋予,速度在Simulink模型中使用“Signal Builder(信号生成器)”模块定义;行人的轨迹和速度曲线在GUI的配置文件中直接定义。
c.安装并配置传感器,加入AEB控制模块。利用车辆参数输出模块和传感器参数输出模块的数据,在跟随模块和系统动力学模块中间加入AEB控制模块,即可在测试车辆中加入AEB的功能,如图5所示。
d.运行Simulink模型,查看仿真结果,如图6所示。
利用PreScan进行虚拟测试,可以在未进行实际场地测试之前对AEB进行初步评价,以降低开发成本,为技术改进提供参考。
6 结束语
本文以我国实际道路中真实的危险工况作为数据来源,通过聚类分析方法处理危险工况数据,得到了典型危险工况场景,建立了用于行人AEB的测试场景,并使用PreScan模拟了测试过程。该测试场景作为AEB测试的重要组成部分,决定了AEB评价的准确性。所研究设计的测试场景客观真实,为AEB行人系统的测试提供了可靠的测试依据。
1Autonomous Emergency Braking-AEB.2013-7-2.
2MònicaòPla.Assessment methodologies for forward looking Integrated Pedestrian and further extension to Cyclists Safety.2013-7-2.
3Niewöhner W,Roth F,et al.Gwehenberger.Proposal for a Test Procedure of Assistance Systems regarding Preventive Pedestrian Protection.Proceedings of the 22nd International Technical Conference on the Enhanced Safety of Vehicles(ESV),2011.
4Niewöhner W.ActiveTest D2.1 Final workshop summary. 2013-6-28.
5National Highway Traffic Safety Administration:Pre-Crash ScenarioTypologyforCrashAvoidanceResearch, Washington DC:NHTSA,2007.
6何晓群.多元统计分析.北京:中国人民大学出版社, 2012.
7谢中华.MATLAB统计分析与应用:40个案例分析.北京:北京航空航天大学出版社,2010.
8吴坚.应用概率统计(第2版).北京:高等教育出版社, 2007.
(责任编辑文楫)
修改稿收到日期为2013年9月12日。
Research on Test Scenarios for AEB Pedestrian System
Liu Ying1,He Jinpeng1,2,Liu Weiguo2,Zhu Xichan1,Li Lin1,Jiang Lijun1
(1.Tongji University;2.Zhejiang Geely Automotive Research Co.,LTD)
To establish AEB(Autonomous Emergency Braking)pedestrian test scenarios suitable for the Chinese traffic conditions,we make reference of some world existing research results,collect some typical pedestrian dangerous cases in Shanghai,and screen out 52 risk cases of car-pedestrian conflicts,then analyze these cases with clustering analysis to obtain five typical categories of dangerous scenarios.According to these typical scenarios,we design test scenarios for AEB pedestrian system compatible with the traffic situations in China and establish corresponding PreScan simulation model.AEB system can be evaluated preliminarily with PreScan simulative test before field test,thus reducing development cost.
Autonomous emergency braking system,Pedestrian,Dangerous conditions,Test scenarios
自动紧急制动系统行人危险工况测试场景
U467.5+2
:A
:1000-3703(2014)03-0035-05
猜你喜欢
煤气与热力(2022年4期)2022-05-23
防爆电机(2021年5期)2021-11-04
意林(2021年5期)2021-04-18
舰船科学技术(2021年12期)2021-03-29
有色设备(2021年4期)2021-03-16
扬子江(2019年1期)2019-03-08
小小艺术家(2018年1期)2018-06-05
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
新少年(2015年6期)2015-06-16