
气动模拟加载系统的模糊PID 控制研究*
2014-06-29 09:55年珊珊王学影
组合机床与自动化加工技术 2014年3期
年珊珊,王学影,郭 斌,赵 静
(1. 中国计量学院 计量测试工程学院,杭州 310018;2.杭州沃镭科技有限公司,杭州 310019)
0 引言
加载力以及加载位移,为制动踏板乃至离合踏板、油门踏板及相关零部件性能检测提供模拟加载手段。
制动踏板是汽车行车系统和制动系统中的关键部件,对踏板质量的检测需要设计可以模拟行车环境的踏板加载装置。现有的模拟加载方式大多是伺服电机加载,然而气动加载机构可以传输更大的驱动力和输出扭矩,有较好的柔性,易于实现,是一种理想的加载方式。
然而,气动加载系统具有非线性和强耦合,气动阀阀口“壅塞”以及气缸活塞的摩擦力变化和气缸腔内压力变化不均匀等特点,使气动加载系统的发展遇到瓶颈。想要获得高鲁棒性、较好控制精度、强跟随的气动系统,除了要选择合理的结构参数,也要设计出合理的控制策略。本文设计了一种模糊PID 控制策略,可以提高气动加载系统的性能,来实现制动踏板检测所需要的
1 系统结构
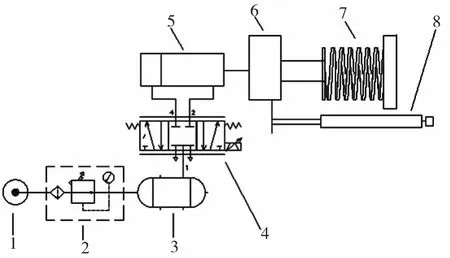
图1 加载系统结构图
汽车踏板检测模拟加载装置的整体结构如图1 所示。该系统主要由气源、气动二联件、储气罐、流量型电气比例阀、气缸、位移传感器、力传感器等组成。其中气源为系统提供动力源;气源连接气动二联件,气动二联件可以调节管路的气压、过滤空气介质并实时显示气压值;气动二联件连接储气罐达到稳定气源气压的作用;流量型电气比例阀是电—气转换元件,控制气体的流量和流向,驱动气缸的动作;气缸是系统的控制对象,实现对负载是加载;位移传感器、力传感器固定在负载部分,是系统中的检测元件,实现负载力和位置的及时反馈,并通过研华数据采集卡PCI1716 将采集到的数据传送到软件控制器中;上位机作为系统的控制器,在每个采样周期中,将反馈信号按照一定的模糊规则计算出相应的控制量,通过AO 端口输出给流量型电气比例阀,完成输出量的实时控制。
2 控制器设计
2.1 PID 控制
PID 控制器具有结构简单、容易实现以及鲁棒性较强的特点,被作为一种被广泛使用的控制器。PID控制经过时间考验,在各种控制技术中占有主导地位。但在实际应用中,PID 控制策略仍有许多局限性:
(1)控制参数整定复杂;
(2)控制器结构上的简单性导致了它的控制品质不理想;
(3)在被控对象大时滞、不稳定等控制系统中的使用产生局限。
本文所涉及的加载机构是大时滞系统,且加载介质是可压缩的空气,物理特性复杂,传统PID 控制难以达到控制效果。基于PID 控制器控制参数的不变性使控制器产生局限,本文将传统PID 控制和模糊控制理论相结合,实现参数随变的PID 控制器,即模糊控制,将该控制策略应用于气动加载系统中。
2.2 模糊PID 控制原理
模糊PID 控制器是根据PID 控制器进行的改良,利用模糊推理,将偏差e和偏差的变化率ec作为模糊控制器的输入,PID 控制器的三个参数dKp、dKi、dKd作为输出,建立输入和输出之间的模糊关系,根据设定的模糊规则做模糊推理,从而实现PID 参数自整定。模糊PID 控制器原理框图如图2 所示。
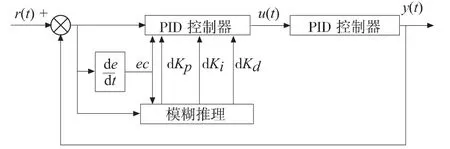
图2 模糊PID 控制器原理框图
在系统运行过程中,偏差e和偏差的变化率ec作为输入量,参数是dKp、dKi、dKd,作为输出量,通过不断检测e和ec,利用模糊系统在线调节dKp、dKi、dKd三个参数,以满足不同e和ec对控制参数的要求,模糊PID 控制具有很好的自学习能力,可使系统具有很好的动、静态特性。
2.3 模糊控制器的设计
模糊控制器的设计主要是包含如下方面:语言变量及其范围的选择、控制规则设计、隶属度函数设计、去模糊化方法选择。对输入变量(偏差和偏差的变化率)进行模糊化,本文采用了一种比较常用的模糊方法,三角形模糊化。偏差e和偏差变化率ec的模糊论域为(-10,10),通过乘以不同的参数因子转化为清晰量,其模糊子集,即语言变量,划分为7 个等级:{NB,NM,NS,ZO,PS,PM,PB},分别代表:负大、负中、负小、零、正小、正中、正大。通过模糊化将确定的输入量转换成一个模糊矢量。模糊集合使用隶属度函数来做定量描述,隶属度函数的值域为{-10,,10},本文中采用了三角形隶属度函数,表达式如下所示:
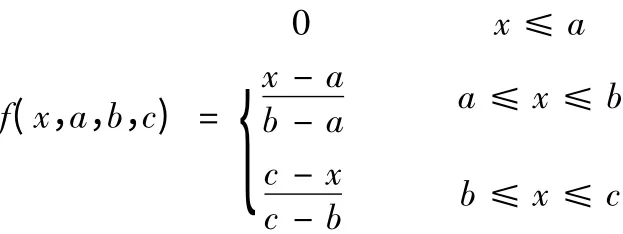
式中a,b,c分别代表三角形的三个顶点,偏差e和偏差变化率ec的隶属度函数如下图3、图4 所示
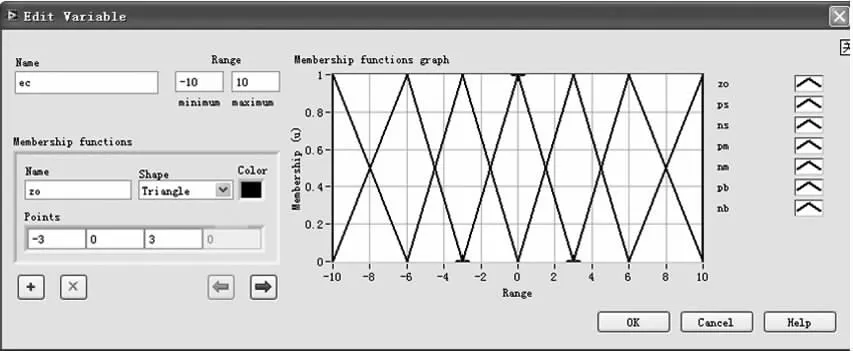
图3 偏差e 的隶属函数

图4 偏差变化率ec 的隶属函数
通过隶属函数和模糊推理可以产生模糊规则,它是按照人的思维推理的一种语言表达形式。模糊规则是一系列的“if—then、else、or”型的模糊语句组成,条件语句前件为输入和状态,后件为控制变量。基于专家知识或熟练操作人员长期积累的经验,就可以得到特定的模糊控制规则,dKp、dKi、dKd的模糊规则控制表如下表1、表2、表3 所示:
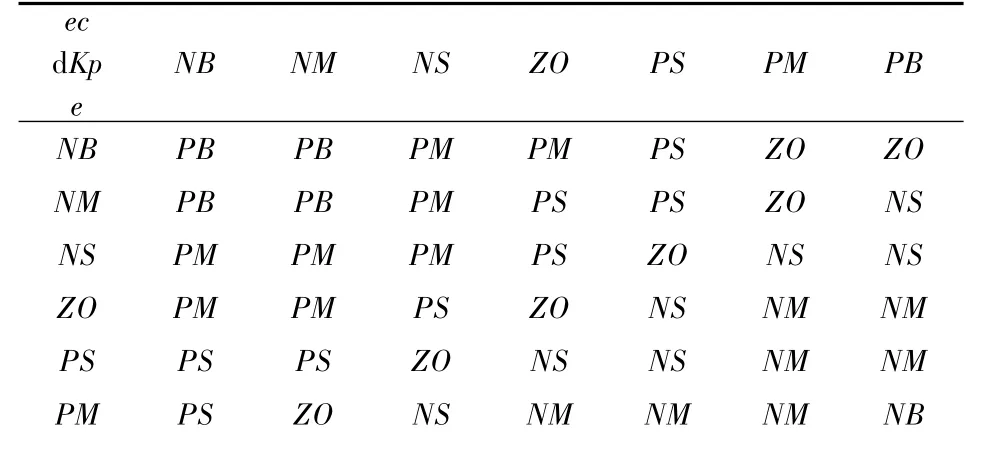
表1 dKp 控制规则表

PB ZO ZO NM NM NM NB NB
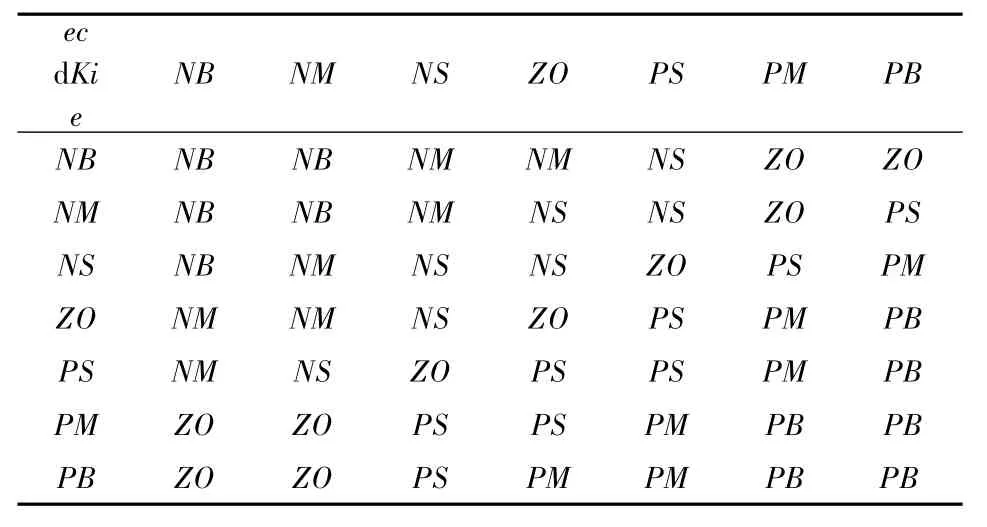
表2 dKi 控制规则表
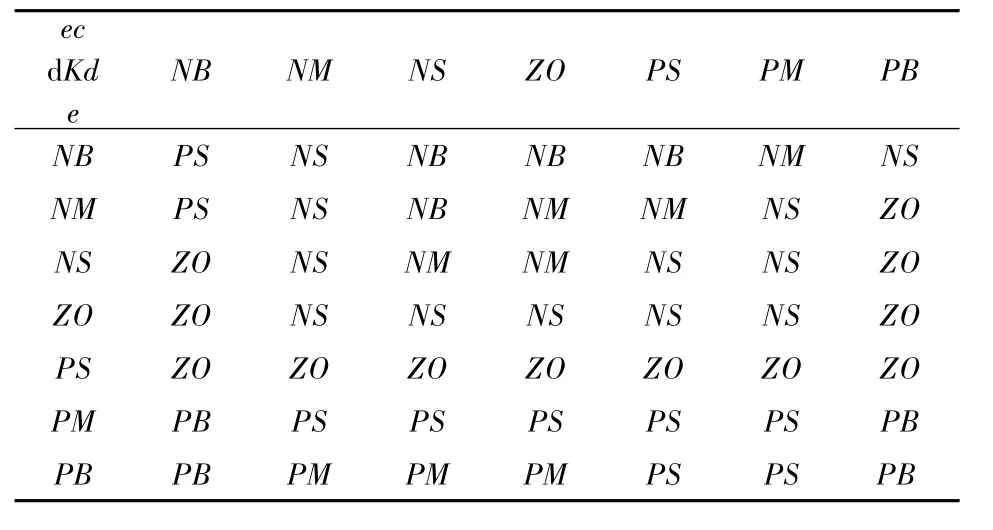
表3 dKd 控制规则表
根据隶属函数和模糊控制规则,可以得到参数整定公式:
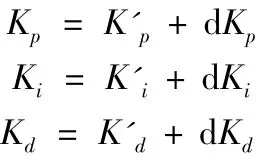
式中:K'p、K'i、K'd为Kp、Ki、Kd的初值,dKp、dKi、dKd为控制其输出的调整值。根据实时采集的e和ec得到PID 参数,实现参数的自整定。模糊PID 控制器的输出为被控对象的控制量,即电气比例流量阀的控制量,实现对系统的控制。
3 控制系统流程
根据模拟加载控制系统和模糊规则,通过隶属函数完成将输入量偏差e和偏差变化率ec的精确量进行模糊化,模糊控制流程如图5 所示:

图5 模糊控制在线控制流程图
基于Labview 平台,通过Fuzzy LOgic Controller Design.vi 编写输入量e和ec的等分三角隶属函数。根据以上的模糊规则和隶属函数,由于Loader Fuzzy Controller.vi 将设定的模糊规则和隶属函数载入模糊控制器,实现PID 参数的整定,参数整定vi 如图6 所示
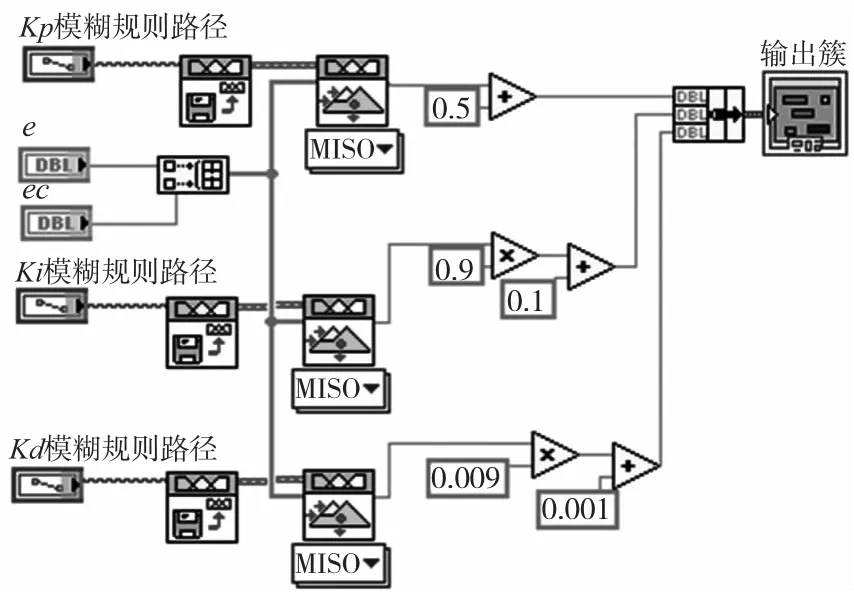
图6 参数整定子vi
其中e、ec为该Vi 的输入,输出簇Kp、Ki、Kd为输出,即PID 控制器参数。
4 实验验证
通过数据采集卡和虚拟仪器平台,可以计算设定与实际输出的偏差,将偏差和偏差的变化率做为模糊控制器的输入,通过模糊处理产生的模糊量经过模糊控制器处理输出Kp、Ki、Kd,即PID 控制器的参数,该参数通过不断的数据采集、处理进行实时整定。模糊PID 控制器的输出控制量是电压量,即流量型电气比例阀的电压,流量型电气比例阀阀芯位置和控制信号大小成正比,阀芯位置和阀口流量成一定线性关系,进而可以通过控制信号来控制流量型电气比例阀的出气口的流量,从而驱动气缸往复运动。
本文对所涉及的模糊PID 控制策略进行了加载力的模拟实验验证,设定值为140kg,误差范围为±3kg。针对本系统的机械特性,负载弹簧的预紧将导致传感器的零位不准,所以在实验之前要对传感器调零。PID控制策略实验结果如下图7 所示。
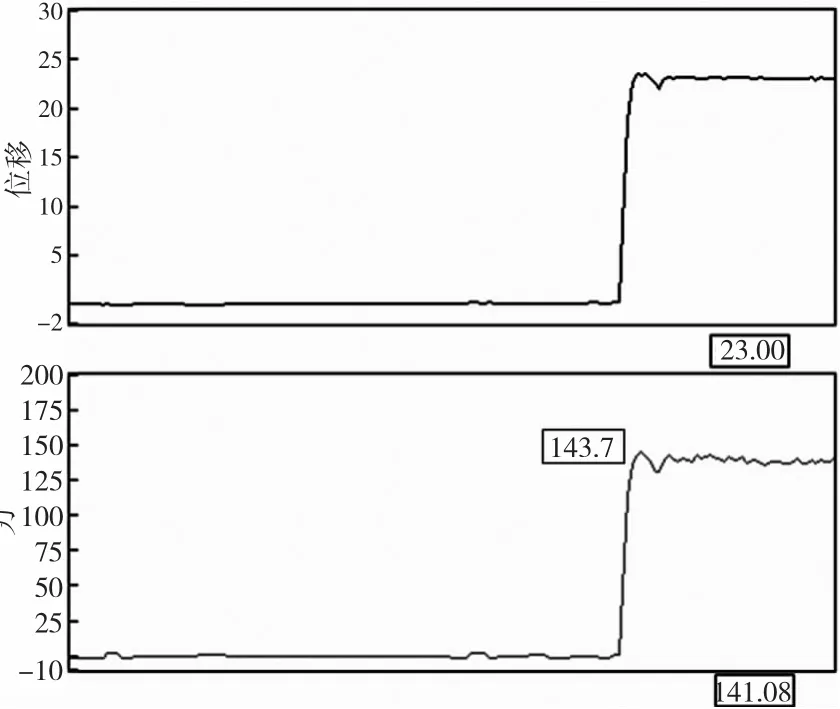
图7 模糊PID 控制策略实验结果
通过虚拟仪器平台可以得到如下参数:
调节时间Ts≈0.28s;
稳态误差e(∞)=X-Y(∞)≈1.08
超调[Y(tp)—Y(∞)]/Y(∞)×100%≈1.823%
本策略是通过模糊控制器来实时整定PID 控制器的参数,使控制有良好的跟随性。该控制策略可以实时调整PID 控制器的参数,克服系统非线性带来的系统误差,具有良好的自适应能力。系统动态输出较好,稳态误差控制在5%以内,调节时间控制在0.3s 以内,符合中华人民共和国汽车行业标准QC/T778-2007《汽车踏板装置性能要求及台架试验方法》的要求,可以模拟制动踏板的加载。
5 结论
针对现有的伺服电机加载系统,气动加载机构可以传输更大的驱动力和输出扭矩,有较好的柔性。然而,气动加载系统具有大滞后的特点,传统的控制策略难以完成控制要求,本文将PID 控制和模糊控制理论相结合来改善传统PID 控制的局限。模糊PID 控制可以在线对PID 控制器的参数自整定,对比PID 控制策略和模糊PID控制策略,后者输出的稳态性能明显高于前者。达到了气动加载控制要求,该加载方式为汽车踏板出厂检测以及耐久性实验提供一种理想加载手段。
[1]赵元金,李虹.基于模糊PID 的电液位置伺服控制器的设计[J].流体传动与控制,2009,32(1):19 -22.
[2]毛志忠,常玉清. 先进控制技术[M]. 北京:科学出版社,2012.
[3]李士勇.模糊控制神经控制和智能控制论[M]. 哈尔滨:哈尔滨工业大学出版社,2002.
[4]华山.基于虚拟仪器技术的微反应器控制系统设计与实现[D].上海:上海交通大学,2009.
[5]杨晶,同志学,王瑞鹏,等.液压机械手电液比例系统模糊PID控制研究[M]机械科学与技术,2013,32(6):834-838.
[6]Rong-Fong Fung,Yun-Chen Wang,Rong-Tai Yang,and Hsing-Hsin Huang.,“A variable structure control with proportional and integral compensations for electrohydraulic position servo control system,”Mechatronics,1997,7(1):67 -81.
[7]Jianming Zhang,Ning Wang,and Shuqing Wang.,“Developed method of tuning PID controllers with fuzzy rules for integrating processes,”Proceeding of the 2004 American control Conference,Massachusetts,2004:1109 -1114.
[8]刘正雷.闭环气动位置控制方法的研究[D],贵阳:贵州大学,2008.
[9]胡寿松. 自动控制原理[M]. 北京:国防工业出版社,2000.
[10]郑辑光,等.过程控制系统[M].北京:清华大学出版社,2012.
[11]王威,杨平. 智能PID 控制方法的研究现状及应用展[J].2008,29(10):1 -3.
[12]尹绥玉,王瞥磊. 汽车踏板支架试验台设计[J]. 湖北工业大学报,2010,4(25):94 -95.
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
成都信息工程大学学报(2021年6期)2021-02-12
黄河之声(2019年23期)2019-12-17
电子制作(2019年16期)2019-09-27
汽车实用技术(2019年17期)2019-09-21
无人机(2017年10期)2017-07-06
黄河之声(2017年13期)2017-01-28
教育界·下旬(2016年4期)2016-11-19
电子制作(2016年21期)2016-05-17
