
基于直流永磁电机的X-Y 工作台设计与实现*
2014-06-29 09:38吕宗旺孙福艳
组合机床与自动化加工技术 2014年3期
吕宗旺,孙福艳,蔡 芃
(1.河南工业大学 信息科学与工程学院,郑州 450001;2.上海理工大学 光电信息与计算机工程学院,上海 200093)
0 引言
此低成本X-Y 台位置伺服系统[1-8],用的马达是一款#700 直流永磁马达,在马达的接线端连接了一个双通道500 线的编码器,这对建立一个伺服系统有很大的作用。为了更好的让马达运行在最佳状态,所有的马达参数都来自于某公司生产的马达性能曲线。到目前为止,社会上还没有发现实质性的应用。从马达的性能曲线可以知道,该马达在转速为2568 rpm、负载电流为5.37A 的时候的堵转扭矩为293.2Nm ,此时的最大功率为78.9W。因此,在速度环中定义马达的最大负载电流5 A,运行速度为2500rpm。
1 硬件设计
此项目的设计思路是以DSP 为“大脑”进行信息的采集[9-10],根据采集的信息产生驱动信号,从而驱动可执行器件,其硬件连接示意图如图1 所示。
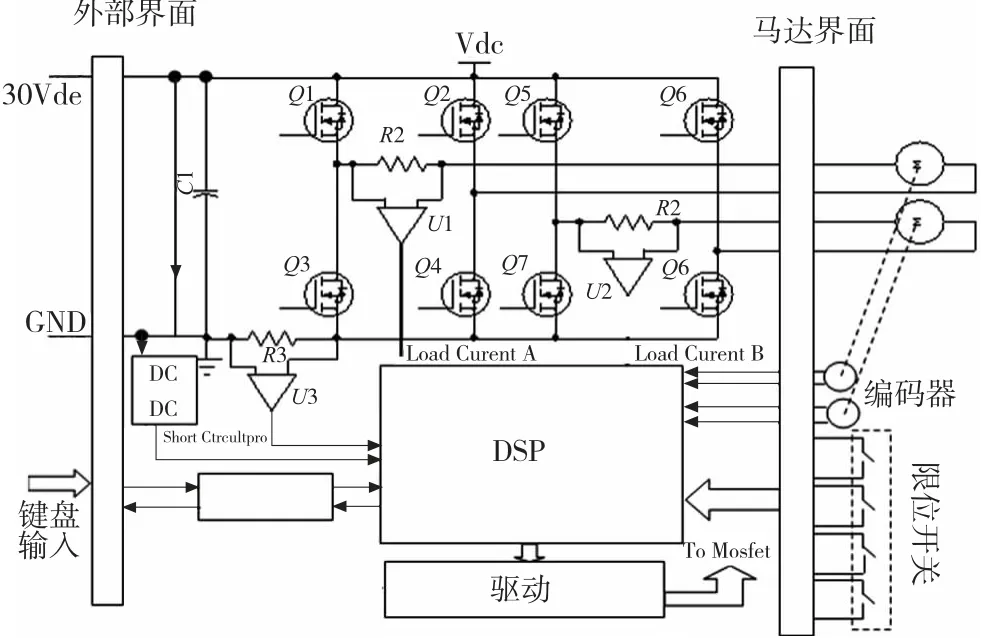
图1 硬件模块
1.1 电流传感
此电路的设计是为了获得转矩环路控制中的直流马达的电流,用可调的精密齐纳稳压器LM431 提供3 V低噪声参考电压。Voffset= 2.5 ×(1 +R42/R43)=2.5 × (1 +2/10)=3 V ,对于比较器MAX4081FASA,输出电压Vout的参考值由REF1A和REF1B控制。电压Vref是Vref1a和Vref1b的平均电压。当两个插脚相连,如图2 所示,输出电压参考值=Voffset/2 (3/2 =1.5 V)。当Vsense=0 时,Vout = 1.5 V。VRS+>VRS-时,参考电压的输出值为正向电流反应;VRS+<VRS-时,参考电压的输出值为负向电流反应。
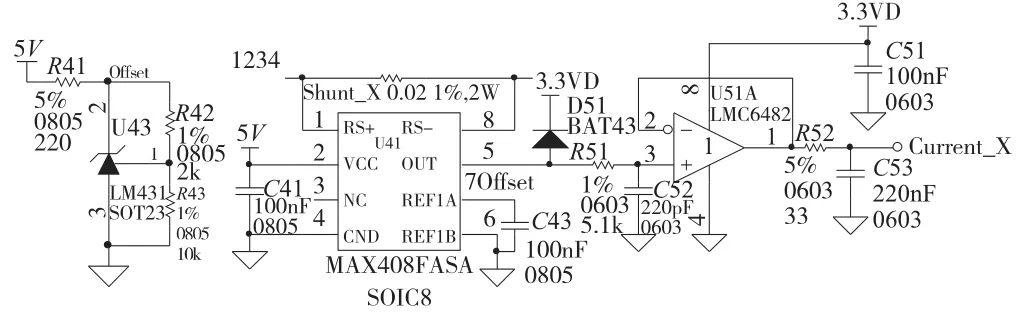
图2 电流传感电路
Vout= Vref±Rsense×Iload×AV =1.5±0.02×Iload×5=1.5±0.1×Iload此处用有源滤波器滤除噪音。LMC6482 是CMOS 轨对轨运算放大器。一个被动式滤波器(R52,C52)要尽可能近的放在ADC 输入端。
1.2 MOS 管的驱动
用专用驱动芯片IR2103 驱动半桥,半桥驱动电路如图3 所示。
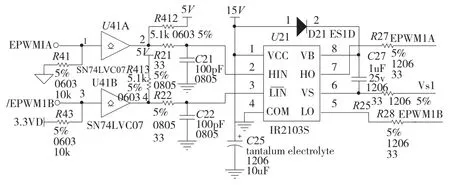
图3 半桥驱动电路
1.3 短路保护
电路可以防止MOS 管因为突然短路而烧坏。此电路包括3 部分:延时电路(如图4b 所示)、比较电路和自锁电路(如图4a 所示)。
最大峰值电流:Ipk_max= ((15/(R37 +R38))*R37)/Rshunt=(15* 20/(20 +180))/0.1 =15 A,当通过Rshunt的负载电流大于15 A 的时候,比较器(U31B)输出高电平。当Vdelay大于1.5 V 时,U31C 的输出为高,即使是Vdelay后来变成低电平。此时,MOS 管被关闭,同时电路型号传递给DSP 。
具体的工作流程如下:
状态0 (正常情况):V6 >V7;V1 ="0";V8 >V9;V14 ="0" ;
状态1 (短路情况):V7 >V6;V1 ="1";V9 >V8;V14 ="1";Q31,Q32 动作;
状态2 (低端驱动器的MOS 管被关闭):V6>V7;V1 = "0";V9 >V8;V14 = "1";Q31,Q32动作。
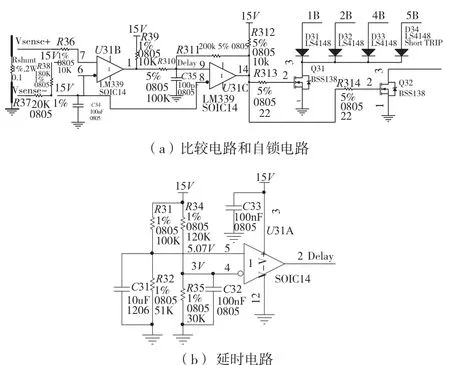
图4 短路保护电路
在上电过程中为了避免一些不稳定的信号误触发自锁电路,延时电路可以使自锁电路在几百毫秒后动作。
时间常数:
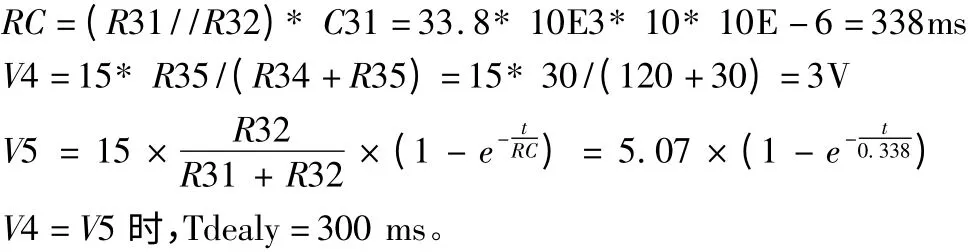
1.4 过温度保护
过温度保护电路如图5 所示。在该电路中,两个负温度系数温度传感器NTC 分别放置在靠近两个H桥附近去测量他们的工作温度。当Vt1>V11和Vt2>V11时,V11=15*R54/(R53 +R54)=5.3V,随着温度的升高,当Vt1<V11或者Vt2<V11时,

其中R0=100K,B= 3450,T0=25oC。
当T≈80oC,Rntc≈12.5K,V11=V10时,过温度保护电路开始工作。
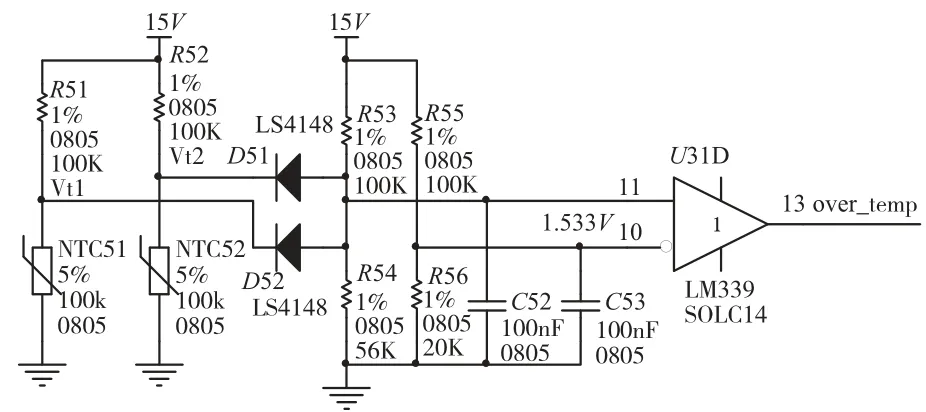
图5 过温度保护电路
1.5 限位开关界面
每一个马达有两个限位开关,并且共享同一个界面电路给DSP ,因为当马达准备运行的时候每个马达的运行方向已经在DSP 中设置好了,所以根本没有必要去见判断那个限位开关被触发。

图6 限位开关电路
2 软件设计
本控制系统主要运用PID 控制算法,通过控制位置环、速度环和电流环实现对马达精确控制的目的。
2.1 控制系统
该控制系统中包括3 个闭环。针对电流环和速度环,用PI 补偿扭矩和速度。为了解决振动问题,只需要用最通用的P 方法去解决位置控制问题。控制模块如图7 所示。

图7 控制模块
2.2 软件架构
软件主要有两个模块:初始化模块和运行模块。初始化模块在开始的时候只执行一次。运行模块的循环运行主要决定于PWM 溢出的中断标志。当中断标志位被置位时,相应的中断服务程序(ISR)开始工作。内部的电流环在每个PWM ISR 周期内校准一次;而外部的速度环和位置环每50 个PWM 周期校准一次。程序流程图如图8 所示。
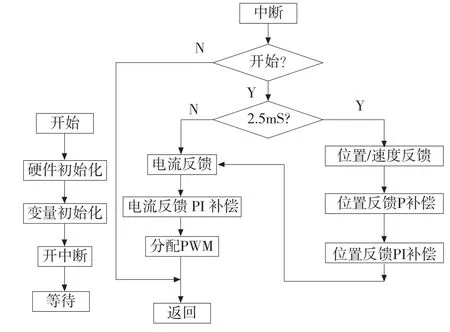
图8 流程图
2.3 PID 运算法则
运用的控制算法工具是PI,

PI 的最终形式可表示为:

把公式分成两部分,一个是比例控制器,一个是积分控制器。
对于P 控制器:uk_P = Kpek;
对于I 控制器:uk_I = uk-1+ KiTek,那么,

和传统的PI 算法相比较,当Ki非常小或者Ki =0时,

该算法是非常可靠的。
2.4 数学考量
为了避免复杂的数学计算,此处只要用PU 模式。所以,在基本电压和基本负载条件下并且驱动达到基本参数值时,软件表示的速度和电流为零。使用的#700 马达额定值为:基本电压:Ua=30V;基本负载电流:Ia=5A;基本速度:Na=2500rpm;基本位置:Pa=0.1 Turns(其中1 Turn =4mm 的直线距离)二级标题的正文部分。
2.5 电流反馈
参考1.1 节,如果电枢电流反馈是:1.5 + / -0.1×Iload,那么

注:pu=测试电流/基本电流,1000h (4096d)= 1pu。pu模式下的负载电流可以简单表示为:
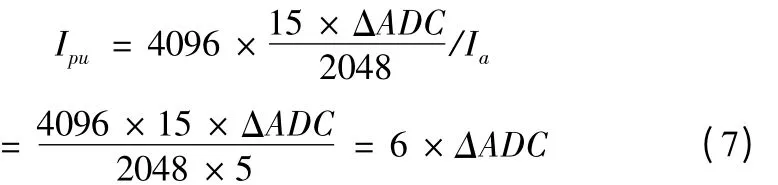

图9 传感电流值
2.6 速度/位置反馈
在该DC 伺服系统中,用一个500 脉冲增量式编码器采集转子转速。传感器输出的两个通道(A 和B)直接连接到DSP 控制器的eQEP,eQEP 计算脉冲的两个边沿。软件中的速率主要是由基于2000 增量/转来决定的。因为马达通常行在2500rpm,只需要用下面的公式计算速率:

这儿,选择T=2.5mS (400Hz)。
可以检测的最小的转速是0.0005 转,当样板在400Hz 时,它的速度分解为:0. 0005 × 400 × 60 =12rpm。QPOSCNT(eQEP 位置计数器)和马达速度之间的关系为:
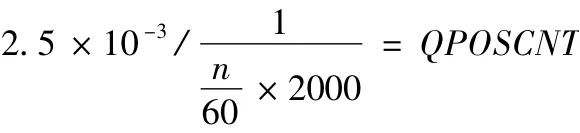
那么,

在pu模式下,速率可以表示为:
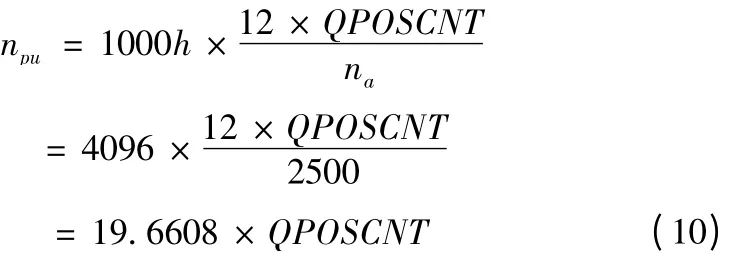
在pu模式下,位置定义为0.1 Turn,那么

2.7 驱动器
为了均分开关消耗,应用PWM 两边信号驱动H桥,PWM 驱动信号和H 桥如图10 所示。DSP 的ePWM 模块工作在up-down 模式,两次开关频率由马达的一侧完成。
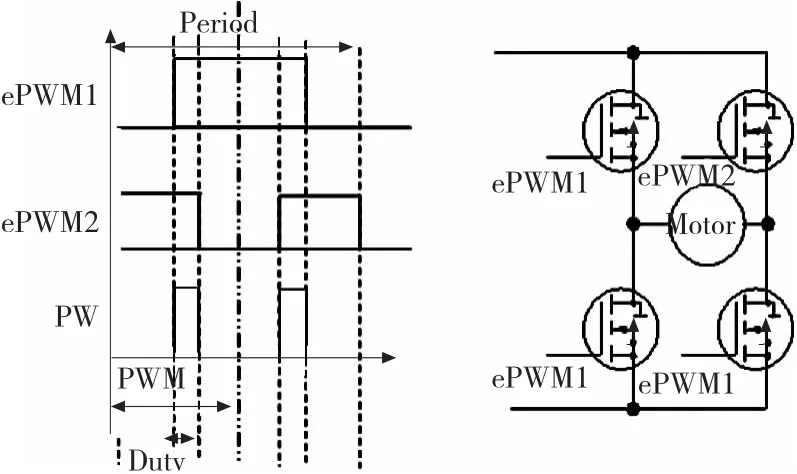
图10 PWM 驱动信号和H 桥
3 仿真及实验结果
通过对图9 控制模块进行数学建模,通过Matlab的simulink 工具箱得到如下仿真结果如图11 所示,通过实际电路实现的波形如图12 所示。
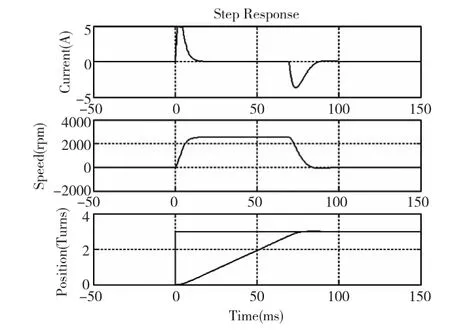
图11 模型的仿真结果
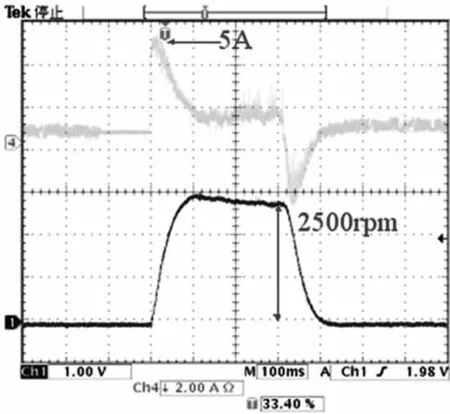
图12 控制器实际输出波形
通过比较可知,通过仿真得到的结果和实际实现的结果是完全吻合的。螺杆转动一周则游标直线移动4mm,即1 Turn=4mm 直线距离,其电机带动螺杆模型见图13。通过对控制对象的计算和测量可知,该系统可以把X-Y 台的精度控制在±0.02mm 之间,即游标的位置控制精度在±0.02mm 之间。

图13 电机带动螺杆模型
4 结论
该X-Y 平台是用#700 直流永磁马达实现位置伺服系统,通过仿真、实验和最终的设计的实际样品的测试结果表明,该系统可以完全满足生产设备的需要,提供更便宜的伺服系统,如果用在公司的生产设备上可以节约大约50%的成本。
[1]禹新路,姜海蓉. 基于CRS 算法的控制器优化在直线电机X-Y 驱动平台中的应用[J]. 微电机,2009,42(10):80 -83.
[2]时丽丽,王钦若,张慧.高速数控冲床X-Y 平台的鲁棒内模控制[J]. 组合机床与自动化加工技术,2011(2):62 -65.
[3]陈光胜,梅雪松,陶涛. X-Y 工作台摩擦误差补偿方法的研究[J].西安交通大学学报,2011,45(1):69 -73.
[4]赵希梅,孙显峰,高君. XY 平台伺服系统的零相位鲁棒控制[J].组合机床与自动化加工技术,2012(7):68 -70.
[5]张营,李鹏,周珂,等.回推非线性PID 复合控制在伺服系统中的应用[J].组合机床与自动化加工技术,2012(5):42 -44.
[6]肖顺根,宋萌萌,钟小倩.数控切削性能的Fuzzy-PID 控制算法的设计与仿真[J]. 组合机床与自动化加工技术,2011(12):73 -77.
[7]邓小东,龚宪生,刘志强,等.摆振疲劳试验机伺服系统模糊PID 控制半实物仿真研究[J].组合机床与自动化加工技术,2010(10):67 -69.
[8]Fan X N. DC Motor Speed Control System Based on PID,Algorithm[J],Madure building and Automatio,2011,40(3):175 -178.
[9]Liu X Y,Dong Y Y.P-fuzzy Self-adaptive PID Control System for BLDCM Based on DSP[J]Motor Technology,2011(3):23 -26.
[10]万山明. TMS320F281xDSP 原理及应用实例[M].北京:北京航空航天大学出版社,2007.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
北京航空航天大学学报(2022年6期)2022-07-02
作文周刊·小学三年级版(2020年24期)2020-07-17
哈尔滨轴承(2020年4期)2020-03-17
猪业科学(2018年4期)2018-05-19
制造技术与机床(2017年3期)2017-06-23
棋艺(2016年4期)2016-09-20
北京航空航天大学学报(2016年4期)2016-02-27
凿岩机械气动工具(2015年3期)2015-11-11
弹箭与制导学报(2015年1期)2015-03-11
