
半潜式采油平台波浪漂移力分析研究
2014-06-22 05:07贺大川施鹏飞陈彧超
船舶力学 2014年4期
王 科,贺大川,施鹏飞,陈彧超
(大连理工大学 工业装备与结构分析国家重点实验室,工程力学系,辽宁大连116024)
半潜式采油平台波浪漂移力分析研究
王 科,贺大川,施鹏飞,陈彧超
(大连理工大学 工业装备与结构分析国家重点实验室,工程力学系,辽宁大连116024)
对于半潜式采油平台而言,波浪漂移力是设计其锚泊系统的重要依据,文章依据波浪辐射和绕射理论,采用高阶边界元方法并考虑了半潜式采油平台几何形状的对称性,应用近场解法得到半潜平台6个方向的波浪漂流力。研究中还采用了在半潜平台直角边和角点处布置双重和多重节点的方法,该方法极大地提高了波浪漂移力的计算准确性和数值稳定性,特别是在高频波浪区域。
半潜平台;波浪漂移力;高阶边界元方法;近场解法
贺大川(1986-),博士研究生。
1 引 言
深水钻井平台通常有浮筒型(Spar)、半潜平台(Semi-Submersible)和FPSO系统(Floating Production,Storage and Offloading system)三种型式。Spar平台只有采油功能,不能存储石油,而且因为是垂直立柱型,垂荡运动明显。FPSO系统集油气生产、储存和外输为一体,但其价格昂贵、技术复杂,特别是钻井系统。半潜平台可以同时进行采油和储油,其水下部分包括箱型浮筒及浮筒上端的3-5个垂直立柱组成,工作甲板支撑在立柱上部。半潜平台的浮筒系统吃水较深,一般位于波浪作用以下,受波浪直接作用较小,垂直立柱对波浪的绕射作用不明显,不会产生很大的越浪爬高。整体而言,半潜平台系统具有小水线面船的一些特点[1-2]。在半潜平台的设计中,锚泊系统分析是非常重要的组成部分,锚泊系统主要考虑的是波浪产生的漂移力[3-4]。半潜平台是一个复杂的空间结构,在波浪的作用下其六个方向的刚体运动都很明显,在计算波浪漂流力时,需要同时考虑半潜平台的辐射运动和绕射运动的影响,是一个极为复杂的大规模数值分析系统[5-6]。其中在初始选型和设计阶段,波浪漂流力可以只考虑主频对角线上平均漂移力的影响,该二阶力是由于半潜平台的一阶运动的定常部分引起的,通常其幅值比波浪力小一个数量级,是设计锚链系统的主要控制力。
边界元方法[7]是目前求解海洋工程波浪与结构物相互作用的重要方法,基于波浪辐射和绕射理论的边界元方法应包括以下几个部分:钻井平台几何形状的高精度实体建模技术;单元类型及基本解(常数元、线性元或者高阶单元);有限水深或者无限水深格林函数方法;大规模满阵方程组的快速求解方法。计算波浪漂移力通常有近场解法[8-9]和远场解法[10-11]两种方法,远场解法只能计算纵荡,横荡和艏摇三个方向的波浪漂移力,而近场解法通过直接求解物体表面的速度势可以得到作用在半潜平台六个方向上的波浪漂移力,近场解法比较复杂,计算难度大。半潜平台是一种在空间上分布非常复杂的需要考虑6个方向波浪力的海上结构,其漂移力的研究需要采用近场解法。为了获得良好的考虑不同波向和频率作用下半潜平台6个方向波浪漂移力,研究中采用了高阶边界元方法[12]并考虑了物体的几何对称性;采用了有限水深格林函数[13]研究钻井平台在真实水深情况下的受力情况;采用 LU分解和GAUSS直接方法求解系数矩阵分别对不同频率的波浪力进行了计算。
在研究中一个重要的手段是在半潜平台的几何奇异点处(角点或者物体表面相交的直角边处)按照几何连续性和物理连续性的概念布置双重和多重节点,在该位置处的节点具有不同的法向导数、属于不同的单元,但具有共同的位置坐标和速度势。数值实践表明,上述方法是实现类似半潜平台这种复杂空间结构波浪漂移力高精度结果的重要保证。本文第二章介绍半潜平台波浪漂移力计算的基本理论及数学公式,阐述了双重和多重节点重配置方法在高阶边界元中的应用,讨论了该方法的优势和必要性;第三章分析了ISSC型半潜平台波浪漂移力结果;第四章总结了影响半潜平台波浪漂移力的主要因素。
2 边界值问题
2.1 基本理论

图1 Semi-Submersible计算示意图Fig.1 Calculation sketch of Semi-Submersible
定义如图1所示笛卡尔坐标系,该坐标系相对于无扰动的自由表面和物体处于静止状态,原点取在自由表面上,z轴垂直向上为正。假定流体为无粘性、不可压缩并且运动是无旋,则流体速度可表示为速度势Φ的梯度。在波浪作用下,半潜平台的运动可假定为一个简谐振荡系统,流体由于半潜平台的摇荡运动产生的速度势可设为Φ=Re {φe-iωt},式中 Re表示实部,ω为入射波浪频率,t为时间,φ为与时间变量无关的空间速度势,一般也为复数。这样所有的边界值问题都可以用复速度φ来表示,最后的计算结果为复数变量与时间因子e-iωt的乘积。速度势φ的求解为定常问题,在整个流体域内也满足拉普拉斯方程。

线性化的自由表面条件为

其中:K=ω2/g为深水波数,g为重力加速度。波浪入射速度势可表示为

其中:A为入射波浪振幅,H为水深,β为入射波浪传播方向与x轴正向的夹角。波数k为散射方程=ktanhkH的实根。根据波浪运动的线性假定,流体总速度势φ可以分解为辐射势(φR)和绕射势(φD)两部分,分别表示如下:

其中:绕射势(φD)包含入射势(φ0)和散射势φ7(),(4)式中:ξj表示物体做辐射运动时在6个刚体自由度方向上的复数振幅,φj为单位振幅辐射势,φ7为入射势作用在固定物体上时产生的散射势。在静平衡位置上做简谐摇荡运动的物体,其边界条件一般可由总速度势的各个分量表示,其中辐射势和绕射势应满足以下边界条件:

2.2 速度势积分方程
上述关于物体表面的辐射和绕射速度势的边界值问题(1-6)可通过格林定理在物面边界上建立积分方程式的方法求解。其中物面上的辐射势满足的积分方程为

而绕射势满足的积分方程为

式中:r=(x,y,z)表示域点,r0=(ξ,η,ζ)表示源点,Sf′为物体内部水线面,Sb表示物体在静水中的湿表面,K为深水波数,格林函数G( r;r0)指的是波浪脉动源,它表示位于r0点的单位强度点源,在r点处产生的速度势。格林函数满足自由表面和远场的波浪辐射条件,有限水深时格林函数可定义为:

式中:(J0)为零阶贝塞尔函数,k的积分路径取k值在实轴上的实根上半部分从而满足波浪的远场辐射条件。
2.3 波浪平均漂移力计算公式
半潜平台(Semi-Submersible)是在长度、宽度和吃水方面几何比尺比较适中的空间复杂结构,波浪平均漂移力对半潜平台六个方向的影响都很重要,本研究采用直接压力积分的近场解法。近场解法求解任意形状物体波浪平均漂移力F(2)和力矩M(2)的公式如下:

2.4 节点重置方法及方程离散求解
半潜平台的空间结构是非常复杂的,当采用边界元方法求解时,针对半潜平台在面-面相交形成的大范围的直角边和角点的情况,研究中采用在该几何奇异位置布置双重和多重节点的方法,例如在原来直角边的一个控制点处再增加一个控制点变成直角边同一位置具有两个控制点,对于三个面构成的角点位置可以增加两个控制点,变成三个控制点。这些新的节点具有相同的空间坐标和速度势,但是具有不同的法向导数并且属于不同的单元。同时研究中采用6节点三角形单元和8节点四边形单元对半潜平台湿表面进行剖分。与重节点方法相匹配,在进行高阶单元网格剖分时,单元不能跨越奇异边界和节点,必须逐面剖分。由于半潜平台具有两个对称面,研究中引入了几何对称性的方法,提高了计算精度和矩阵的组装时间。空间复杂结构的波浪漂移力计算在短波时会有数值不稳定现象出现,研究中采用了Gauss直接方法求解高频波浪问题,而在其它波浪频率内采用LU分解方法。
3 Semi-Submersible波浪漂移力分析
半潜平台是由立柱和浮箱组成的,长宽比适中具有透空间隔的极为复杂的三维大型结构物,它通常具有两个对称面(关于x和y轴对称)。表1为研究中采用的ISSC型半潜平台的基本设计和工作参数。

表1 半潜平台基本参数Tab.1 Basic parameters of Semi-Submersible
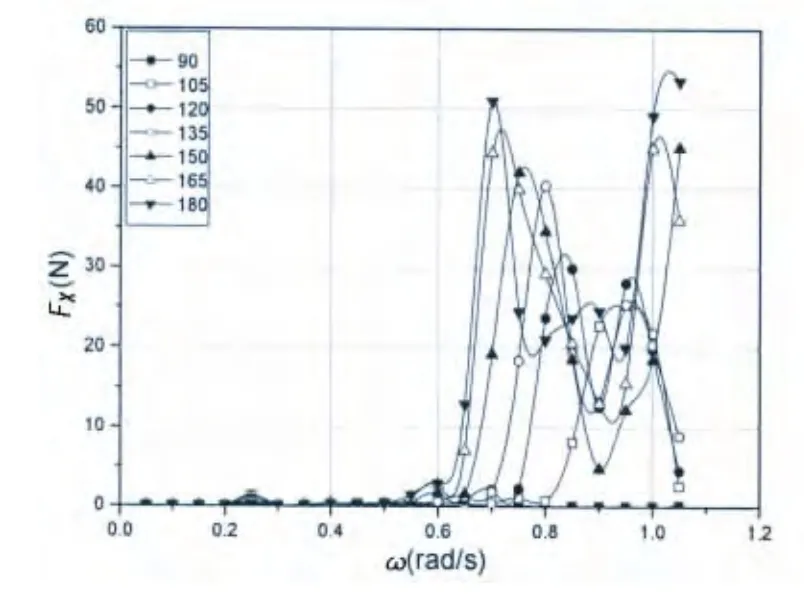
图2 纵荡漂移力Fig.2 Surge drifting force

图3 横荡漂移力Fig.3 Sway drifting force
由图2可见,当ω<0.6时,纵荡漂移力很小,几乎为0。当波浪频率ω>0.6时,随着波浪频率的增加,纵荡漂移力大幅震荡,产生两个极值区间0.6<ω<0.9;0.9<ω<1.05。入射角度不同,纵荡漂移力在中频和高频波浪作用下,变化情况也不同。在0.6<ω<0.9区间,随着入射角度的增加,纵荡漂移力依次出现极值,但入射角度越小,出现极值的频率越高。当入射波浪角度β=90°时,纵荡漂移力为0,当β=105°时,最大纵荡漂移力为25,对应的波浪频率为ω=0.95。当β=165°时,最大纵荡漂移力为48,对应的波浪频率为ω=0.7。在ω>0.9的区间,入射波浪频率对纵荡漂移力的影响出现分化,β=135°的波浪在此频率区间的漂移力极值逐步减小,而β>135°的波浪在此区间的漂移力出现极大值,增值表现甚至超过0.6<ω<0.9 区间的值,例如 β=180°,ω=1.05 时,FX=55。
对于横荡漂移力来说,由图3可见,当ω<0.4时入射波浪角度和频率的变化对横荡漂移力无影响,在ω>0.4范围内,随着波浪频率的增加,横荡漂移力随波浪入射角度变化呈震荡变化的趋势,近似分为三个极值区0.4<ω<0.8,0.5<ω<0.9,0.8<ω<1.05。 区间变化有稍许重叠。 随着波浪入射角度和频率的变化,对应的横荡漂移力在不同区间达到极值。同时应注意到,不同入射频率下,最大横荡漂移力并不一定是横浪产生的。例如当ω=0.8时,最大横荡漂移力为30,对应的入射波浪为β=135°,而此时β=90°的横浪产生的横荡漂移力是最小的。对比图3和图4还可以发现,不同波浪入射角度条件下,纵荡最大波浪漂移力集中在ω=0.7和ω=1.0附近,而横荡最大波浪漂移力集中在ω=1.0附近,但横荡和纵荡波浪漂移力的最大值比较接近。
图4是垂荡漂移力计算结果。从图中可以看出,ω=0.25为不规则频率,这是由于势流假定没有考虑流体粘性造成的。随着入射波浪频率的增加,垂荡漂移力在ω=0.65附近先后达到极值,最大极值约为46。
由图5可知,由于半潜平台的对称性,β=180°时,整个波浪频率范围内横摇波浪漂移力均为0。而且当ω<0.4时,无论波浪从哪个方向入射,横摇波浪漂移力几乎为0,说明ω<0.4时半潜平台在横摇方向是稳定的。当ω>0.4时,随着波浪频率的增加,横摇漂移力剧烈波动,产生多个极大值。而且随着波浪入射角度的改变,极大值所对应的波浪频率也会随之改变。例如,当β=90°时,横摇波浪漂移力分别在 ω=0.62,0.85,1.02 产生三个极大值,而当 β=135°时,横摇波浪漂移力会在 ω=0.6,0.7,0.85,0.9 产生四个极大值。需要特别注意的是,最大横摇波浪漂移力是在β=165°,ω=0.65时产生的,此时的波浪漂移力约为330。
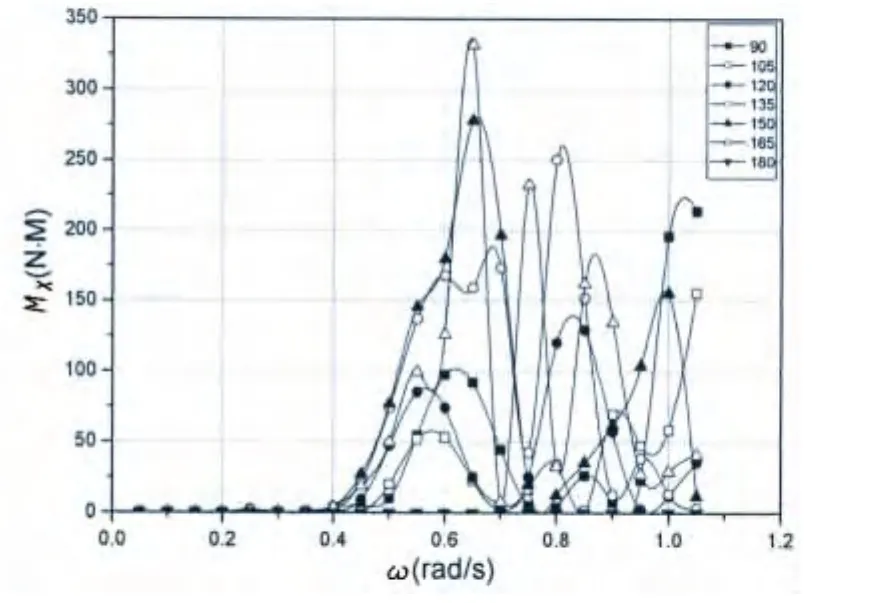
图5 横摇漂移力Fig.5 Roll drifting force
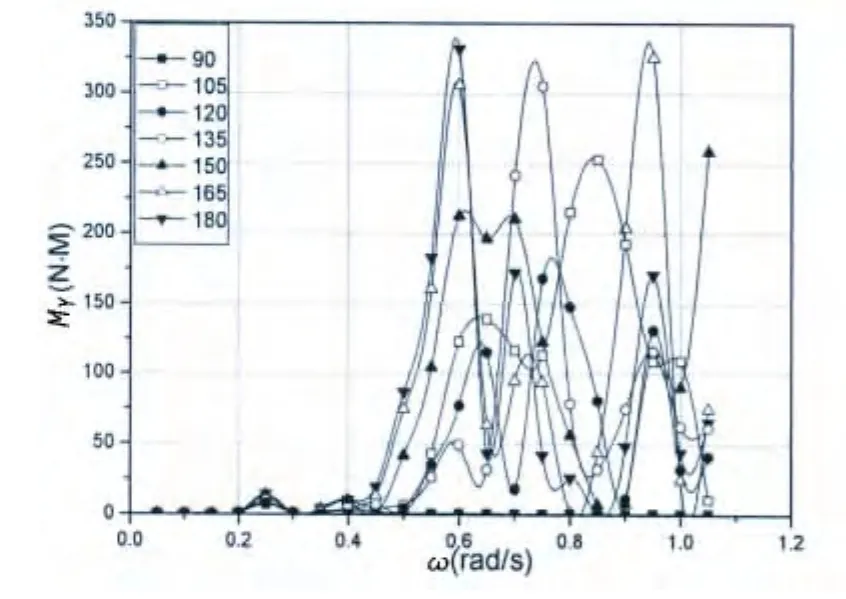
图6 纵摇漂移力Fig.6 Pitch drifting force
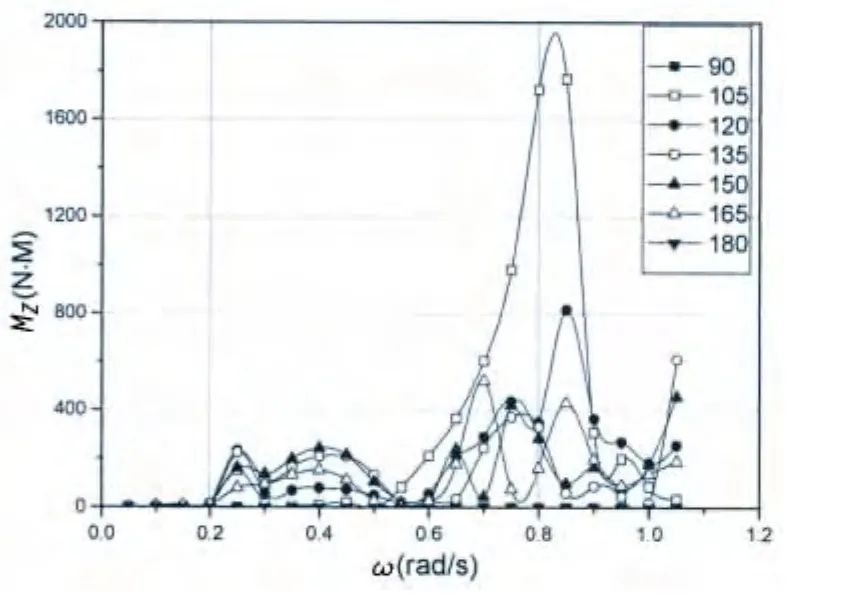
图7 艏摇漂移力Fig.7 Yaw drifting force
图6为纵摇波浪漂移力计算结果。同横摇一样,由于半潜平台的几何对称性,当β=90°时,纵摇漂移力为0。ω=0.25为纵摇波浪漂移力的不规则频率。在ω>0.4范围内,随着波浪频率的增加,纵摇漂移力呈波动式变化,产生数个极值,并且波动相对强烈。改变波浪入射角度,会改变漂移力曲线形状,同时也会改变极值所对应的波浪频率。不同波浪入射角度条件下,产生最大纵摇漂移力所对应的波浪频率不同。当β=105°时,最大纵摇漂移力约为250,对应的波浪频率为ω=0.85;当β=135°时,最大纵摇漂移力约为325,对应的波浪频率为ω=0.75。在整个入射波浪频率范围内,最大纵摇波浪力为330左右,对应的波浪分别为 β=180°,ω=0.6 时,MY=330,β=135°,ω=0.7 时,MY=325,β=165°,ω=0.9 时,MY=330。
4 结 论
本文应用高阶边界元及几何奇异节点的重置方法对半潜平台的波浪漂移力进行了研究,计算过程中还考虑了半潜平台的几何对称性。上述方法对半潜平台的波浪漂移力的计算精度有很大的提高作用,特别是奇异节点的重置方法,是局域复杂空间结构的半潜平台二阶波浪漂移力获得强收敛解的重要因素。当ω≤0.4时,平移漂移力对波向和频率的影响不明显,但当0.6≤ω≤1.0时波向和频率对漂移力影响明显,特别需要指出的是高频ω=0.9附近的波浪对纵荡和横荡影响显著。对于转动漂移力而言,0.6≤ω≤1.0的波浪对横摇和纵摇影响显著,而ω=0.8,β=105°的波浪对艏摇漂移力影响明显。整体而言,对于双浮筒立柱结构的半潜平台,有效波浪作用区域集中在0.6≤ω≤1.0。
[1]缪泉明,董慎言,刘楚学.半潜平台在波浪中的运动响应[J].中国海洋平台,1994,Z1:344-356.
[2]杨立军,肖龙飞,杨建民.半潜式平台垂向运动低频响应特性[J].海洋工程,2008,28(2):1-7.
[3]史琪琪,杨建民.半潜式平台运动及系泊系统特性研究[J].海洋工程,2010,28(4):1-8.
[4]Wu S,Murray J J,Virk G S.The motions and internal forces of a moored semi-submersible in regular waves[J].Ocean Engng.,1997,24(7):593-603.
[5]Newman J N.Marine Hydrodynamics[M].The MIT Press,Cambridge,Massachusetts,1979.
[6]Eatock Taylor R,Chau F P.Wave diffraction-some developments in linear and non-linear theory[J].Offshore Mech Arctic Eng,1992,114:185-194.
[7]Hess J L,Smith A M O.Calculation of non-lifting potential flow about arbitrary three-dimensional bodies[J].J Ship Res,1964,8:22-44.
[8]Maruo H.The drift of a body floating on waves[J].Journal of Ship Research,1960,4:1-10.
[9]Newman J N.The drift force and moment on ships in waves[J].Journal of Ship Research,1967,11(1):51-60.
[10]Pinkster J A.Low frequency second order wave exciting forces on floating structures[D].Ph.D.Thesis.Technical University of Delft,1980.
[11]Ogilvie T F.Second order hydrodynamic effects on ocean platforms[C]//International Workshop on Ship and Platform Motion.Berkeley,USA 1983,1983:205-265.
[12]Kim M H,Yue D K P.The complete second-order diffraction solution for an axisymmetric body.Part 2:Bichromatic incident waves[J].Journal of Fluid Mechanics,1990,211:557-593.
[13]Liu Y H,Kim C H,Lu X S.Comparison of higher-order boundary element and constant panel methods for hydrodynamic loadings[J].J Offshore Polar Eng,1991,1(1):8-17.
[14]Newman J N.Algorithms for the free-surface Green function[J].Journal of Engineering Mathematics,1985,19:57-67.
Wave drift forces of Semi-Submersible
WANG Ke,HE Da-chuan,SHI Peng-fei,CHEN Yu-chao
(State Key Laboratory of Structural Analysis for Industrial Equipment,Department of Engineering Mechanics,Dalian University of Technology,Dalian 116024,China)
In the hydrodynamic study of Semi-Submersible,wave drift forces are important for the designing of mooring system.Based on wave radiation and diffraction theory,a higher-order boundary element method(HOBEM)is applied and symmetry is considered to calculate the wave drift forces of Semi-Submersible under definite wave directions and frequencies.The mean wave drift forces and moments on Semi-Submersible are computed by near-field method.Double and multiple nodes relocation method is introduced in higher order boundary element method to remove geometrical singularity along intersecting edges and corners.This algorithm significantly improves the accuracy and numerical stability of mean drift force even in high frequency domain.
Semi-Submersible;wave drift forces and moments;higher-order boundary element method;Double and multiple nodes relocation method;near field method
U674.38+1
A
10.3969/j.issn.1007-7294.2014.04.007
1007-7294(2014)04-0406-07
2013-12-26
国家重点基础研究发展计划资助(2013CB036101);大连理工大学基础科研费资助(DUT10LK43)
王 科(1970-),男,大连理工大学工程力学系副教授,E-mail:kwang@dlut.edu.cn;
猜你喜欢
振动与冲击(2022年6期)2022-03-27
大学物理实验(2022年6期)2022-03-03
新世纪智能(数学备考)(2021年10期)2021-12-21
河北理科教学研究(2020年3期)2021-01-04
中学数学研究(广东)(2019年12期)2019-07-18
中学数学杂志(2019年1期)2019-04-03
弹箭与制导学报(2018年3期)2018-08-28
建材与装饰(2018年50期)2018-02-22
广东技术师范大学学报(2016年5期)2016-08-22
电子科技(2015年11期)2015-03-06
