浅析分段PID控制算法在柴油机齿条位置控制中的应用方法
2014-05-28 06:19才雨虹
商 2014年42期
才雨虹

摘 要:本文针对柴油发动机的齿条位移进行控制,该控制属于执行器位置控制,并对该系统的电磁式执行器建立数学模型,建立齿条位移闭环增量式PID控制器,并对其P、I、D值进行整定,最后进行控制系统的仿真实验。通过仿真发现该控制器对大小阶跃响应的输入,均能改善系统动静态特性。
关键词:柴油机齿条位移;位置控制;分段PID控制算法
1.引言
柴油车在经济性、动力性和安全性等方面具有优势,因此柴油发动机电控系统值得研究。该系统的主要部分是齿条位置控制,所以齿条控制算法的研究很有前景[1]。
2.电磁式执行器建模
柴油机的齿条位置直接受控于控制执行机构,该机构是电磁式的[2]。由力学原理,直接推导得到执行器的运动方程[3]:
以上各参量均与T、KP、TI、TD有关[5]。若T为10毫秒,KP、TI、TD为定值,控制增量与先后三次测量值的偏差有关。柴油机齿条控制输出的Δu(k)即是齿条位移的增量。
4.分段PID控制器参数整定
保持柴油机齿条位置系统动态效果好,就要选取合适的PID参数。柴油机齿条的有效位移约为13mm,将13mm均匀分成13段,每段1mm,然后利用不同的PID参数控制不同段。
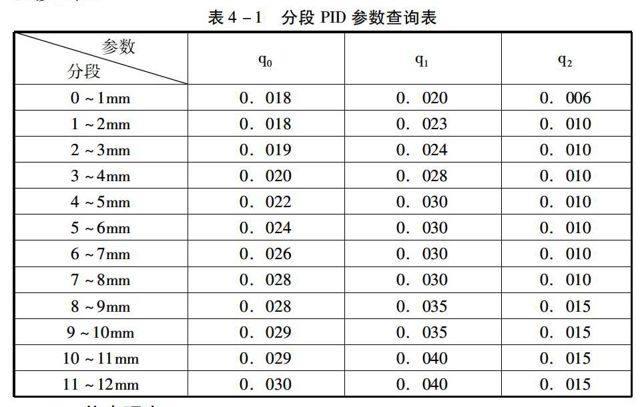
各段参数采用试凑法整定,对公式(8)进行增量式控制,并对q0、q1、q2试凑整定,确立PID分段查询表。T为10ms,测得q0、q1、q2后,根据式(9)计算KP、TI、TD值。表4-1为分段PID参数的各段修正值。
5.仿真研究
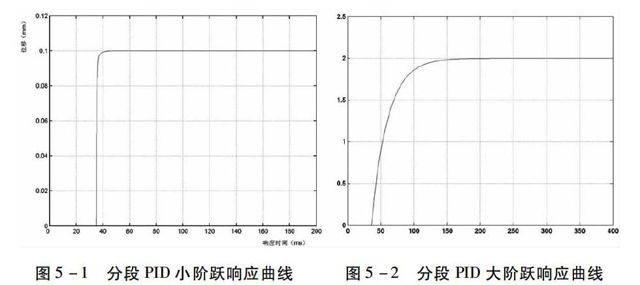
通过分段PID控制,柴油机齿条位移控制效果如下:输入为小阶跃时,响应曲线如图5-1所示,提高了系统的动态特性;输入为大阶跃时,响应曲线如图5-2所示,仍提高了系统的动态特性。仿真表明此控制器克服干扰能力强,鲁棒性好,稳态特性也较好。
6.结论
本文对柴油机电磁式执行机构进行建模,得到确定部分的传递函数,并针对柴油机齿条位移控制系统进行分段PID的控制器的设计,并通过仿真实验证明无论是小阶跃响应还是大阶跃响应均能使系统动态特性提高,稳态性能增强。(作者单位:吉林省电子信息技师学院)
参考文献:
[1] 李元春、周晓. 柴油机齿条位置执行器及电控调速系统的研究. 内燃机学报. 2002(1)
[2] 施光林,钟廷修. 柴油机共轨式电控燃油喷射新技术与环境保护. 资源环境. 2000(7)
[3] 高巍、李元春. 柴油机电控系统鲁棒模糊双闭环控制.吉林大学学报(工学版).2007(5)
[4] 李彦强,朱从乔,黄次浩. 柴油机电子调速器PID参数模糊自校正研究. 内燃机学报:2001,19(3):267~269
[5] 王云平. PID模糊控制器在醫用理疗仪温度控制器中的应用. 辽宁省交通高等专科学校学报. 2007(5)